
二阶椭圆锥齿轮驱动的行星轮系植苗机构及其设计方法.pdf

是你****枝呀


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

二阶椭圆锥齿轮驱动的行星轮系植苗机构及其设计方法.pdf
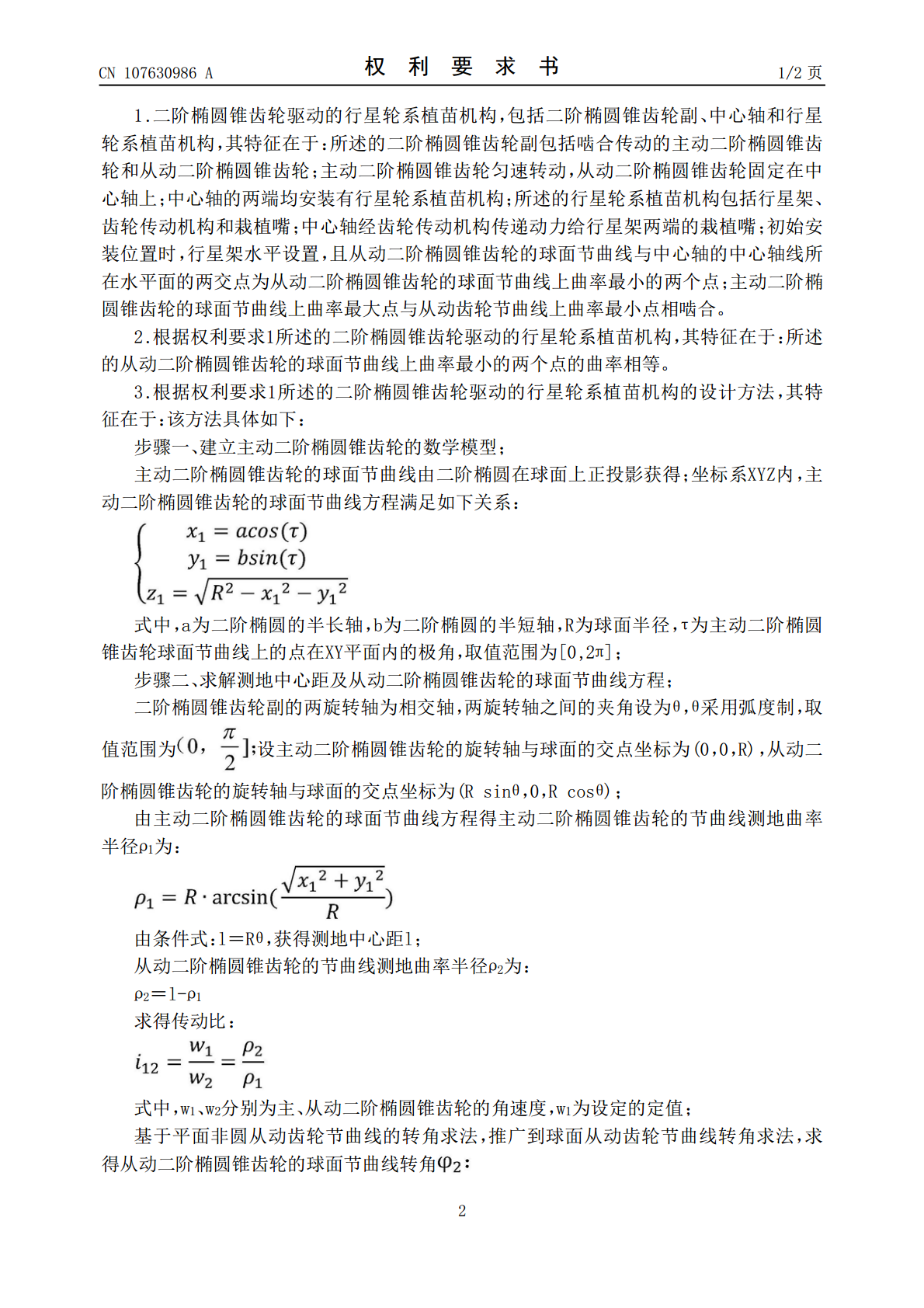
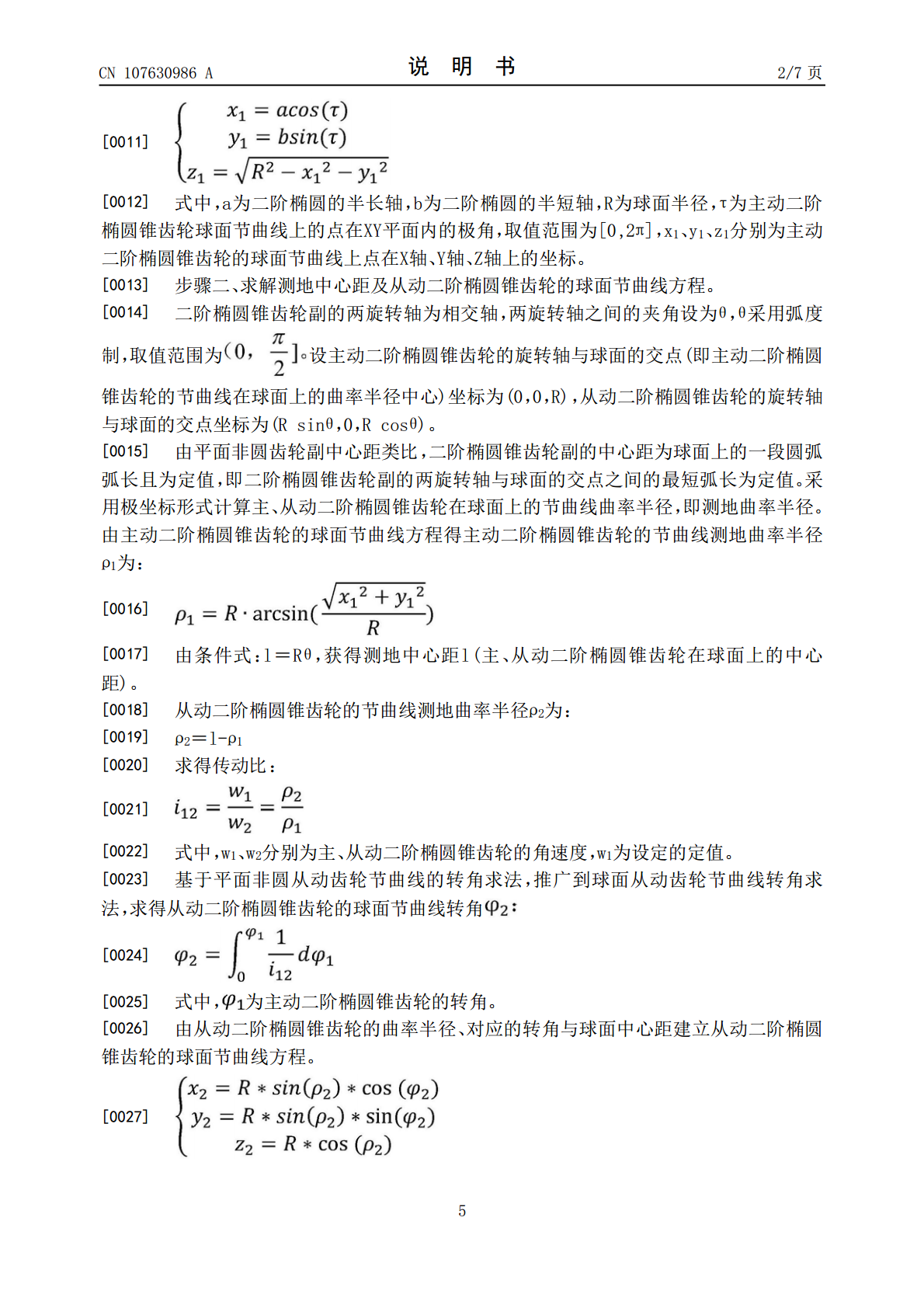
本发明公开了二阶椭圆锥齿轮驱动的行星轮系植苗机构及其设计方法。传统的旋转鸭嘴式植苗机构在接苗和植苗时近似停顿时间不够长。本发明包括二阶椭圆锥齿轮副、中心轴和行星轮系植苗机构;初始安装位置时,行星架水平设置,且从动二阶椭圆锥齿轮的球面节曲线与中心轴的中心轴线所在水平面的两交点为从动二阶椭圆锥齿轮的球面节曲线上曲率最小的两个点;主动二阶椭圆锥齿轮的球面节曲线上曲率最大点与从动齿轮节曲线上曲率最小点相啮合。本发明在不改变一个运动周期时间长短的基础上延长接苗和植苗阶段的近似停顿时间,提高接苗和植苗的成功率。

行星轮系植苗机构的设计与试验.docx
行星轮系植苗机构的设计与试验行星轮系植苗机构的设计与试验摘要:随着农业技术的不断发展,机械化种植成为现代农业的主要趋势。行星轮系植苗机构是一种新型的机械化种植设备,其设计与试验对于提高农业生产效率具有重要意义。本文通过对行星轮系植苗机构的设计原理和结构特点进行研究,并通过试验验证其性能和可行性。结果表明,行星轮系植苗机构具有良好的植株适应性和作业效率,为现代农机化种植提供了一种新的选择。关键词:行星轮系;植苗机构;设计;试验;农机化种植一、引言近年来,随着农业产业化和农村农业人口减少的趋势,农业机械化在我

行星轮系植苗机构的设计与试验的任务书.docx
行星轮系植苗机构的设计与试验的任务书任务书题目:行星轮系植苗机构的设计与试验任务背景:随着现代农业技术的不断进步,农业机械化已成为农业发展的重要趋势。植树造林是国家生态建设的重要任务之一,而机械化植树则是提高植树造林效率和质量的关键。目前,机械化植树技术已有一定的发展,但受到苗木定植不稳定、植树成本高等问题的影响,机械化植树仍面临一些困难。为了解决这些问题,需要设计一种行星轮系植苗机构,实现苗木稳定定植,提高植树成活率和效率,降低植树成本。任务目标:1.设计一种行星轮系植苗机构,实现苗木稳定定植。2.进行
行星轮悬臂式植苗机构.pdf
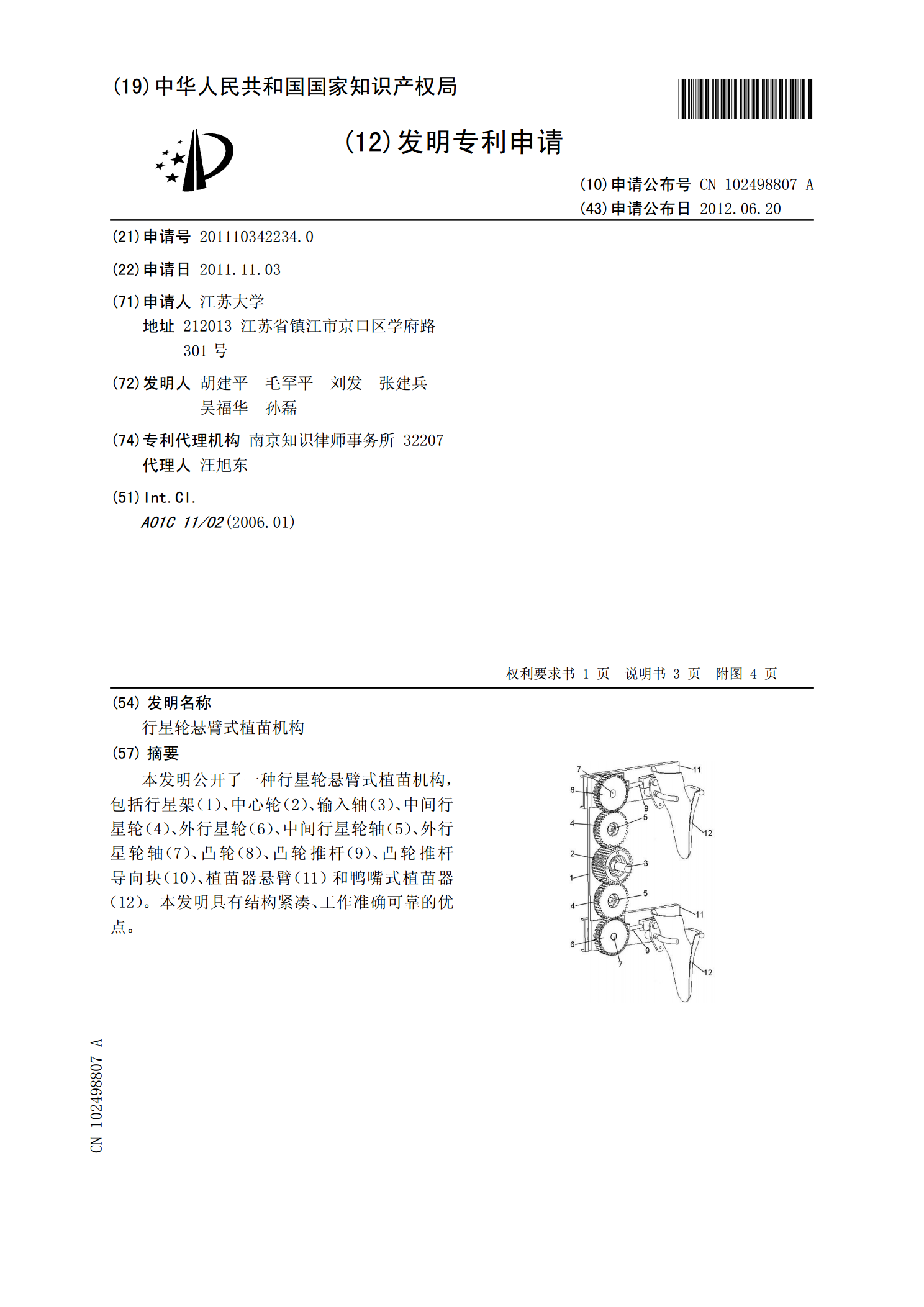
本发明公开了一种行星轮悬臂式植苗机构,包括行星架(1)、中心轮(2)、输入轴(3)、中间行星轮(4)、外行星轮(6)、中间行星轮轴(5)、外行星轮轴(7)、凸轮(8)、凸轮推杆(9)、凸轮推杆导向块(10)、植苗器悬臂(11)和鸭嘴式植苗器(12)。本发明具有结构紧凑、工作准确可靠的优点。?

非圆齿轮行星轮系打纬方法及打纬机构.pdf
本发明公开了一种非圆齿轮行星轮系打纬方法及打纬机构,采用非圆齿轮行星系机构将织机主轴的匀速转动转变成筘座的非匀速间歇性摆动。行星架由织机主轴驱动,主动太阳轮活套在织机主轴上,主动太阳轮固定不动。行星轴由行星架驱动,行星轴上固结有两个非圆齿轮,其中一个和主动太阳轮啮合,另一个和从动太阳轮啮合。从动太阳轮固结于输出轴,即摇轴,打纬筘座固结在摇轴上。通过建立两级非圆齿轮传动的数学模型,按照给定摇轴输出转角规律设计非圆齿轮节曲线,实现筘座在后心位置240°的完全停顿时间。该机构传动链短,结构紧凑,完全满足织机的打