
圆钢端面双目图像视差求取方法.pdf

Jo****63


1/6
2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
圆钢端面双目图像视差求取方法.pdf
圆钢端面双目图像视差求取方法,所述方法包括如下步骤:(1)前期准备及图像处理;(2)圆钢双目图像圆形拟合;(3)求取圆钢端面圆心的视差。该方法分别对两幅图像的圆钢边界进行拟合确定出中心坐标,即可获得对应圆钢端面中心点的视差值,圆钢端面边界拟合时已知圆钢的直径信息,可以得到比较精确的轮廓边界,降低误差。
一种视差面精细建模的双目图像视差计算优化方法.pdf
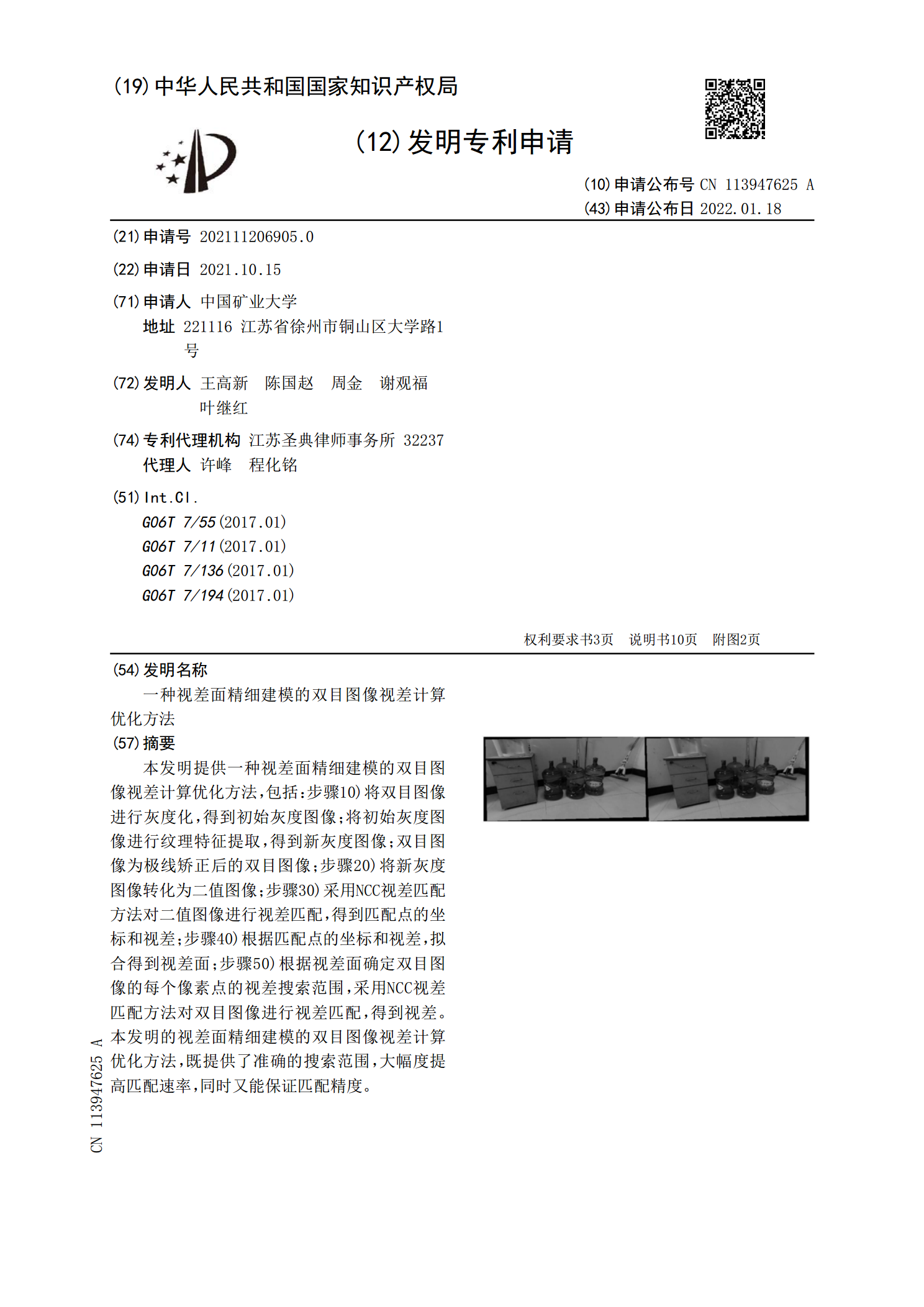
本发明提供一种视差面精细建模的双目图像视差计算优化方法,包括:步骤10)将双目图像进行灰度化,得到初始灰度图像;将初始灰度图像进行纹理特征提取,得到新灰度图像;双目图像为极线矫正后的双目图像;步骤20)将新灰度图像转化为二值图像;步骤30)采用NCC视差匹配方法对二值图像进行视差匹配,得到匹配点的坐标和视差;步骤40)根据匹配点的坐标和视差,拟合得到视差面;步骤50)根据视差面确定双目图像的每个像素点的视差搜索范围,采用NCC视差匹配方法对双目图像进行视差匹配,得到视差。本发明的视差面精细建模的双目图像视
虚拟主动视差计算补偿的双目渲染方法及系统.pdf
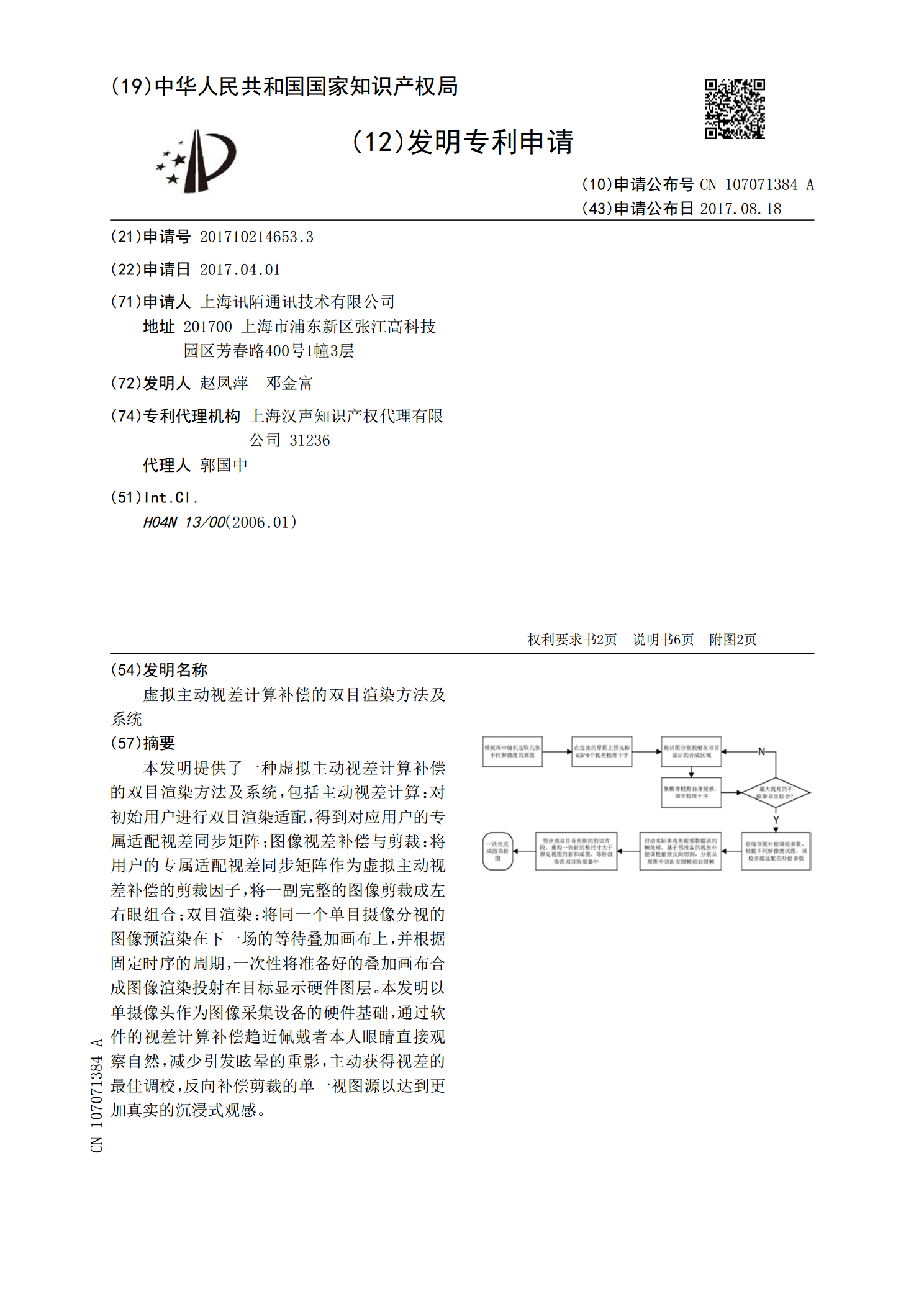
本发明提供了一种虚拟主动视差计算补偿的双目渲染方法及系统,包括主动视差计算:对初始用户进行双目渲染适配,得到对应用户的专属适配视差同步矩阵;图像视差补偿与剪裁:将用户的专属适配视差同步矩阵作为虚拟主动视差补偿的剪裁因子,将一副完整的图像剪裁成左右眼组合;双目渲染:将同一个单目摄像分视的图像预渲染在下一场的等待叠加画布上,并根据固定时序的周期,一次性将准备好的叠加画布合成图像渲染投射在目标显示硬件图层。本发明以单摄像头作为图像采集设备的硬件基础,通过软件的视差计算补偿趋近佩戴者本人眼睛直接观察自然,减少引发
基于无人机双目视差图像的输电线路覆冰厚度辨识方法.pdf
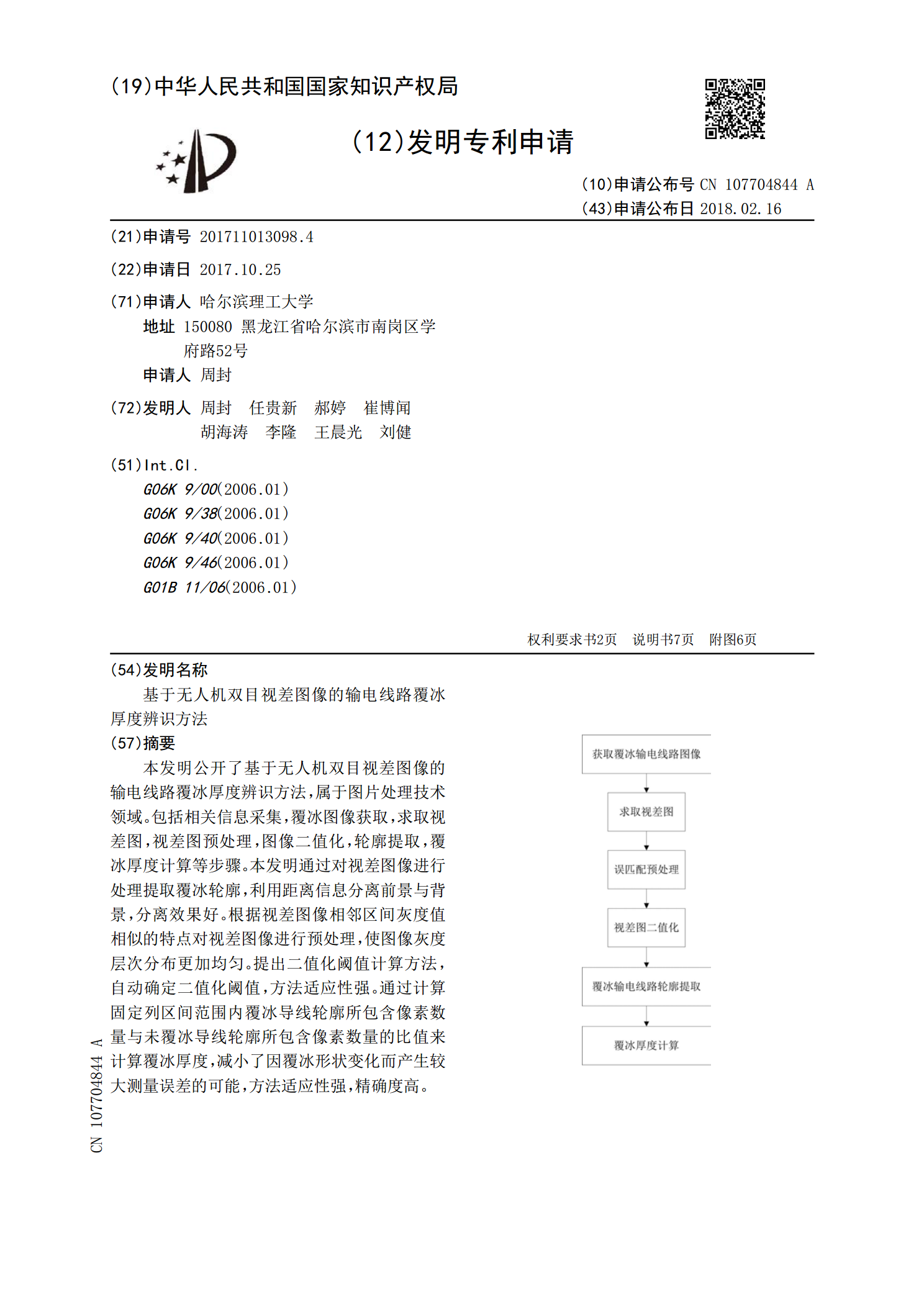
本发明公开了基于无人机双目视差图像的输电线路覆冰厚度辨识方法,属于图片处理技术领域。包括相关信息采集,覆冰图像获取,求取视差图,视差图预处理,图像二值化,轮廓提取,覆冰厚度计算等步骤。本发明通过对视差图像进行处理提取覆冰轮廓,利用距离信息分离前景与背景,分离效果好。根据视差图像相邻区间灰度值相似的特点对视差图像进行预处理,使图像灰度层次分布更加均匀。提出二值化阈值计算方法,自动确定二值化阈值,方法适应性强。通过计算固定列区间范围内覆冰导线轮廓所包含像素数量与未覆冰导线轮廓所包含像素数量的比值来计算覆冰厚度
一种双目视差计算方法及装置.pdf
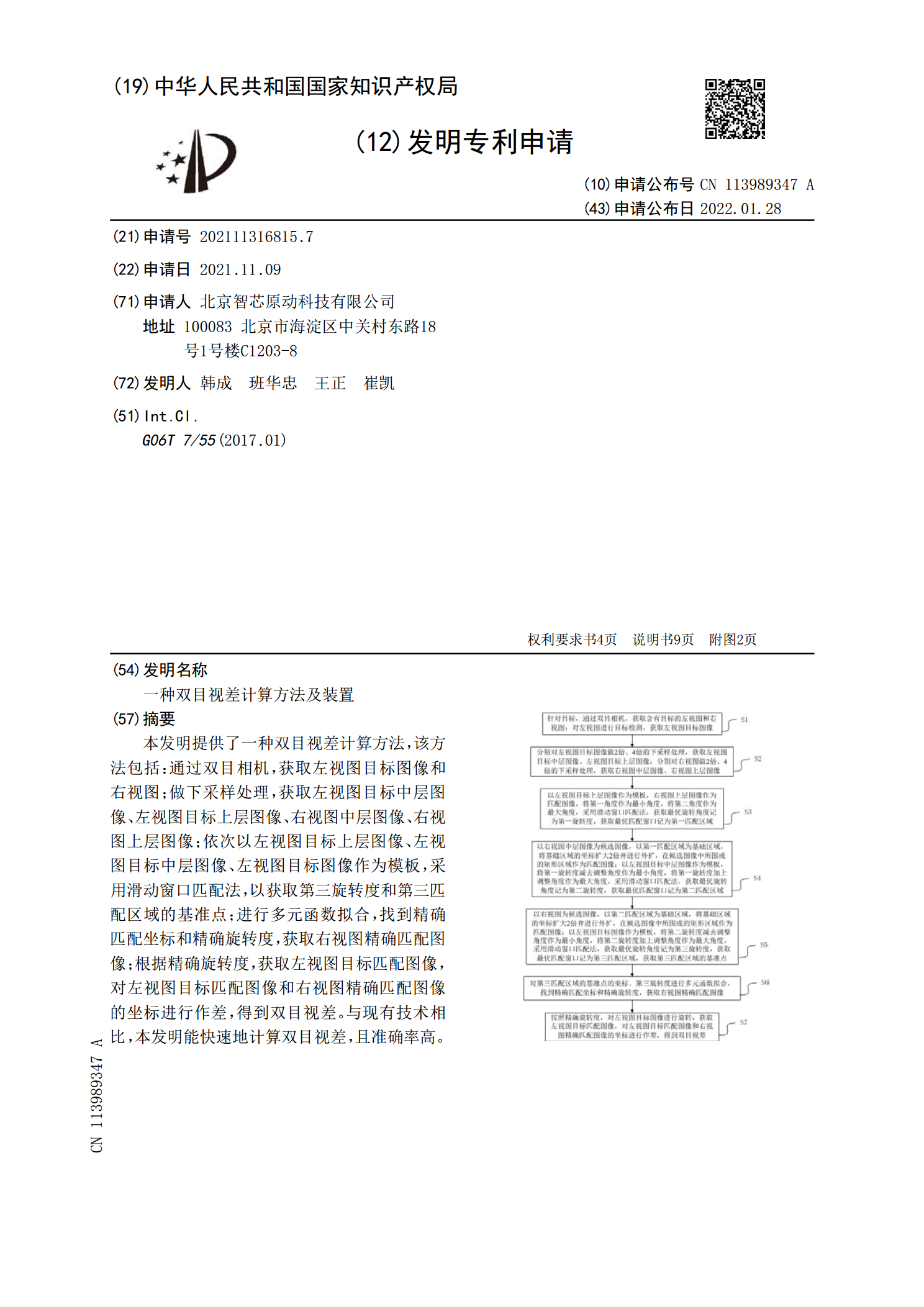
本发明提供了一种双目视差计算方法,该方法包括:通过双目相机,获取左视图目标图像和右视图;做下采样处理,获取左视图目标中层图像、左视图目标上层图像、右视图中层图像、右视图上层图像;依次以左视图目标上层图像、左视图目标中层图像、左视图目标图像作为模板,采用滑动窗口匹配法,以获取第三旋转度和第三匹配区域的基准点;进行多元函数拟合,找到精确匹配坐标和精确旋转度,获取右视图精确匹配图像;根据精确旋转度,获取左视图目标匹配图像,对左视图目标匹配图像和右视图精确匹配图像的坐标进行作差,得到双目视差。与现有技术相比,本发