
基于无人机双目视差图像的输电线路覆冰厚度辨识方法.pdf

一吃****永贺

1/10

2/10

3/10
4/10
5/10
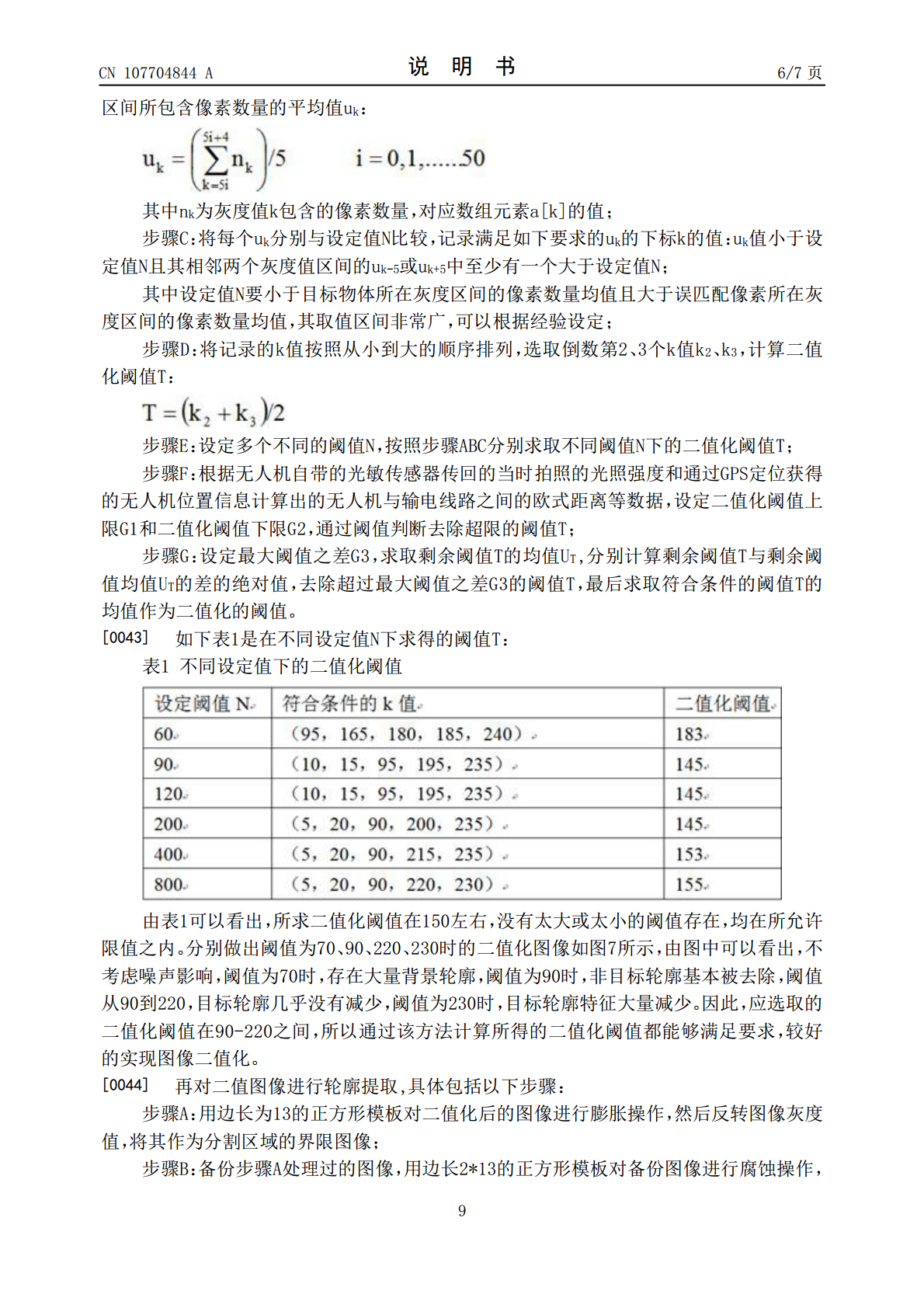
6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于无人机双目视差图像的输电线路覆冰厚度辨识方法.pdf
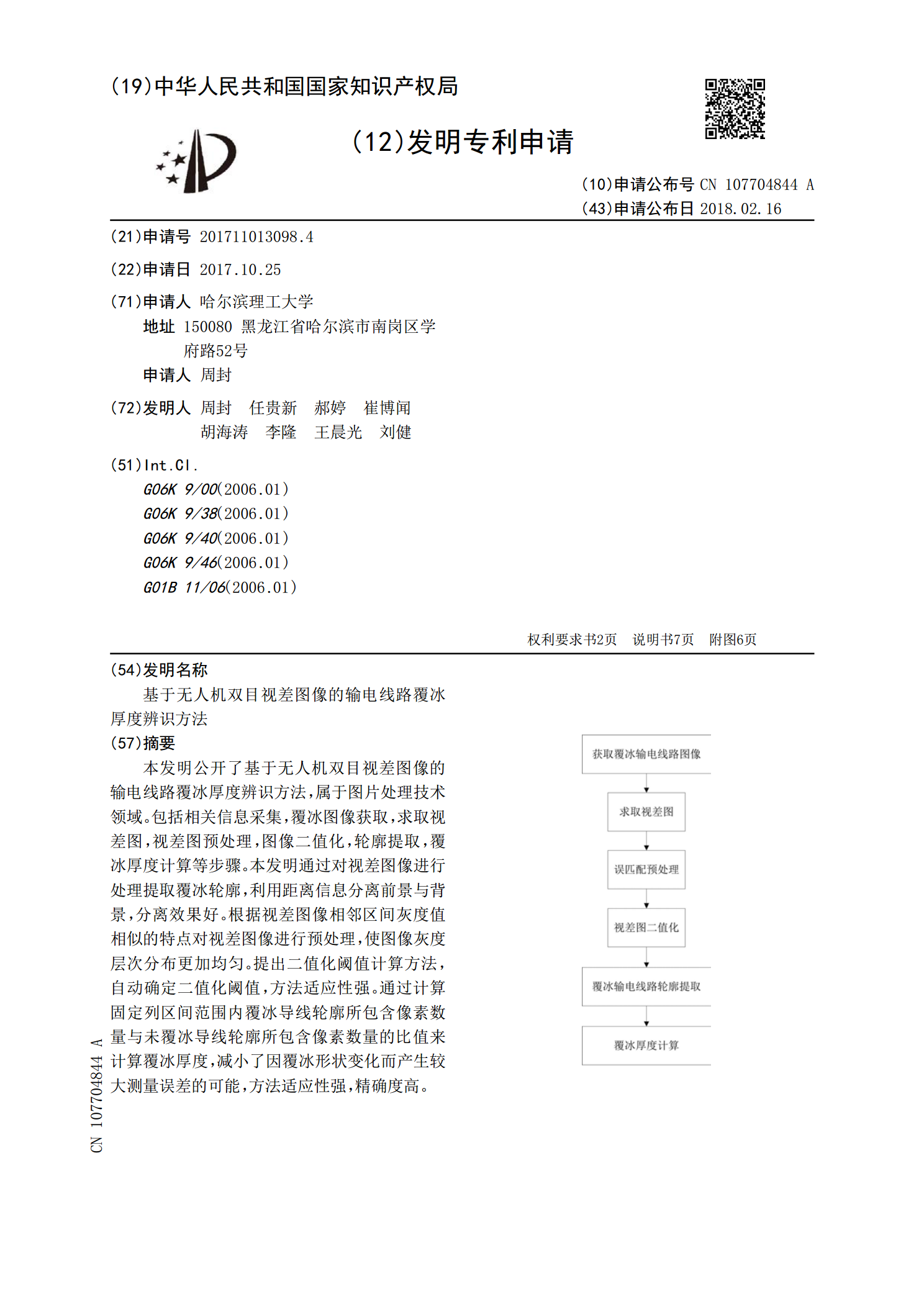
本发明公开了基于无人机双目视差图像的输电线路覆冰厚度辨识方法,属于图片处理技术领域。包括相关信息采集,覆冰图像获取,求取视差图,视差图预处理,图像二值化,轮廓提取,覆冰厚度计算等步骤。本发明通过对视差图像进行处理提取覆冰轮廓,利用距离信息分离前景与背景,分离效果好。根据视差图像相邻区间灰度值相似的特点对视差图像进行预处理,使图像灰度层次分布更加均匀。提出二值化阈值计算方法,自动确定二值化阈值,方法适应性强。通过计算固定列区间范围内覆冰导线轮廓所包含像素数量与未覆冰导线轮廓所包含像素数量的比值来计算覆冰厚度

基于图像处理的输电线路覆冰厚度检测方法研究.docx
基于图像处理的输电线路覆冰厚度检测方法研究基于图像处理的输电线路覆冰厚度检测方法研究摘要:被覆冰的输电线路会导致线路绝缘性能下降,甚至会引发严重事故。因此,准确且及时地检测输电线路的覆冰厚度是非常重要的。本文提出了一种基于图像处理的输电线路覆冰厚度检测方法。首先,通过无人机或人工巡检获取输电线路图像;然后,通过预处理和分割技术提取图像中的覆冰区域;最后,通过分析覆冰区域的特征,估计出覆冰厚度。实验证明,该方法能够准确地检测覆冰厚度,为输电线路的安全运行提供了一种有效手段。关键词:输电线路;覆冰厚度检测;图

基于图像处理的输电线路覆冰厚度测量算法.pdf
本发明公开了基于图像处理的输电线路覆冰厚度测量算法,该方法主要以安装在杆塔上的工业摄像机采集的输电线路覆冰前后的图像为研究对象,对其进行图像灰度化、图像增强、图像分割等处理,通过摄像机标定将图像坐标转换为世界坐标,比较覆冰前后图像的边界轮廓来计算输电线路实际覆冰厚度的方法。通过实例分析证明了该发明操作简单、误差较小,能够实现输电线路导线和绝缘子覆冰厚度的定量描述。

一种基于图像监测的输电线路覆冰厚度检测方法.pdf
本发明公开了一种基于图像监测的输电线路覆冰厚度检测方法,具体步骤是:A、对输电线路图像进行预处理;B、使用边缘检测算子进行边缘检测;C、对边缘直线进行分类;D、利用hough变换算法对分类的边缘直线进行边缘过滤;G、根据提取边缘轮廓测量输电导线的覆冰厚度。由于输电线路的边缘直线具有方向性,对边缘直线进行分类,利用hough变换算法对分类的边缘直线进行边缘过滤,根据提取未覆冰和覆冰输电导线图像的边缘轮廓,从而确定未覆冰和覆冰输电导线的宽度,输电导线的覆冰厚度即为覆冰的输电导线宽度与未覆冰的输电导线宽度的差值

基于图像处理的输电线路覆冰厚度检测方法研究的开题报告.docx
基于图像处理的输电线路覆冰厚度检测方法研究的开题报告一、研究背景和意义输电线路是电力系统中重要的组成部分,输电线路的运行状况直接关系到电力系统的稳定和可靠运行。在冬季,由于气温较低,空气中的水分容易凝结成冰,在输电线路的导线、绝缘子等部位容易结冰,从而影响输电线路的电气性能,降低其运行能力,甚至导致输电线路的停运,造成电力系统停运事故。因此,实时监测输电线路上的覆冰厚度,对保障电力系统运行安全具有重要意义。原有的输电线路覆冰厚度检测方法大多采用人工巡检的方式,由人员到现场进行检查,不仅费时费力,而且容易出