
四杆机构定位装置.pdf

一只****写意


1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四杆机构定位装置.pdf
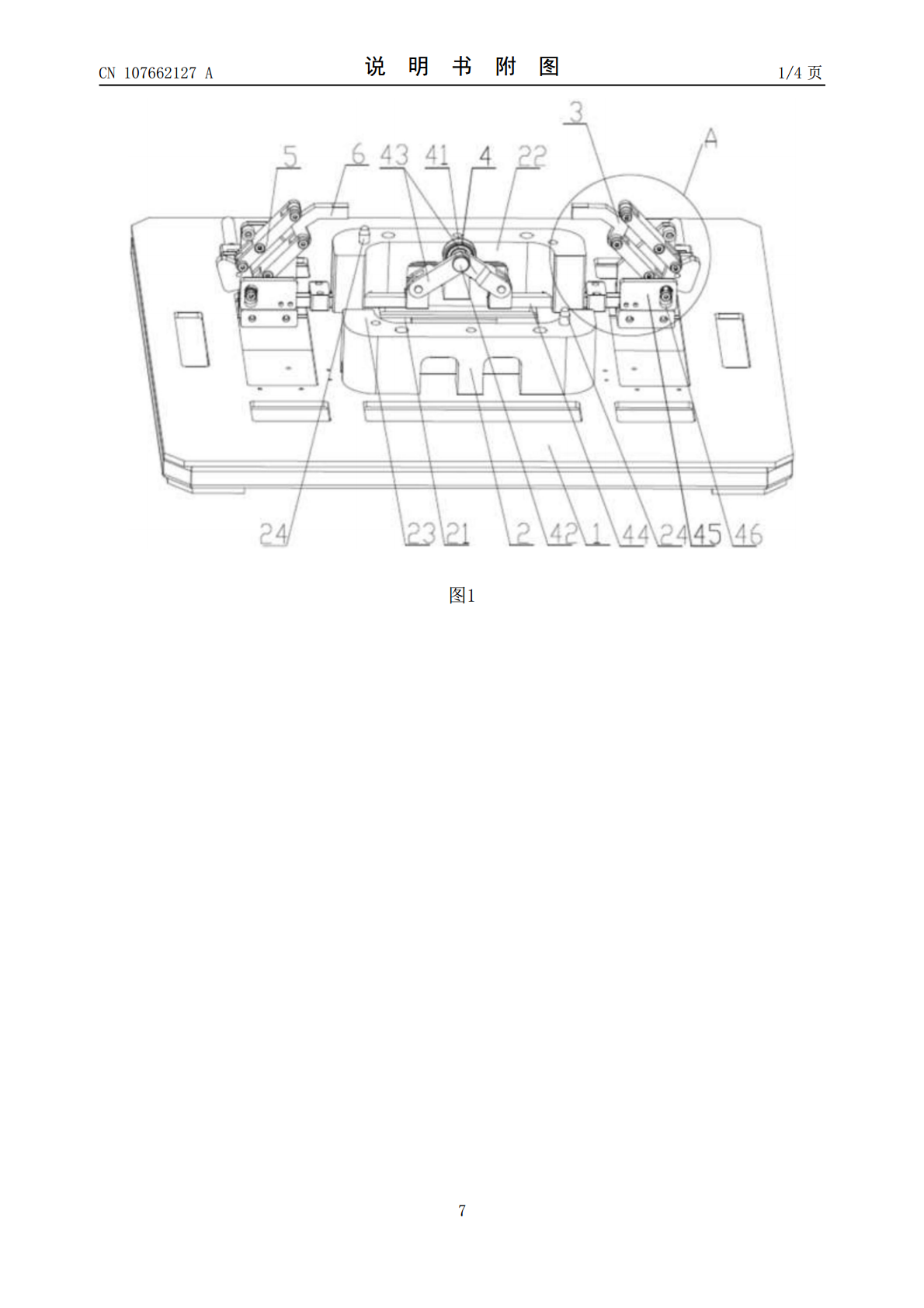
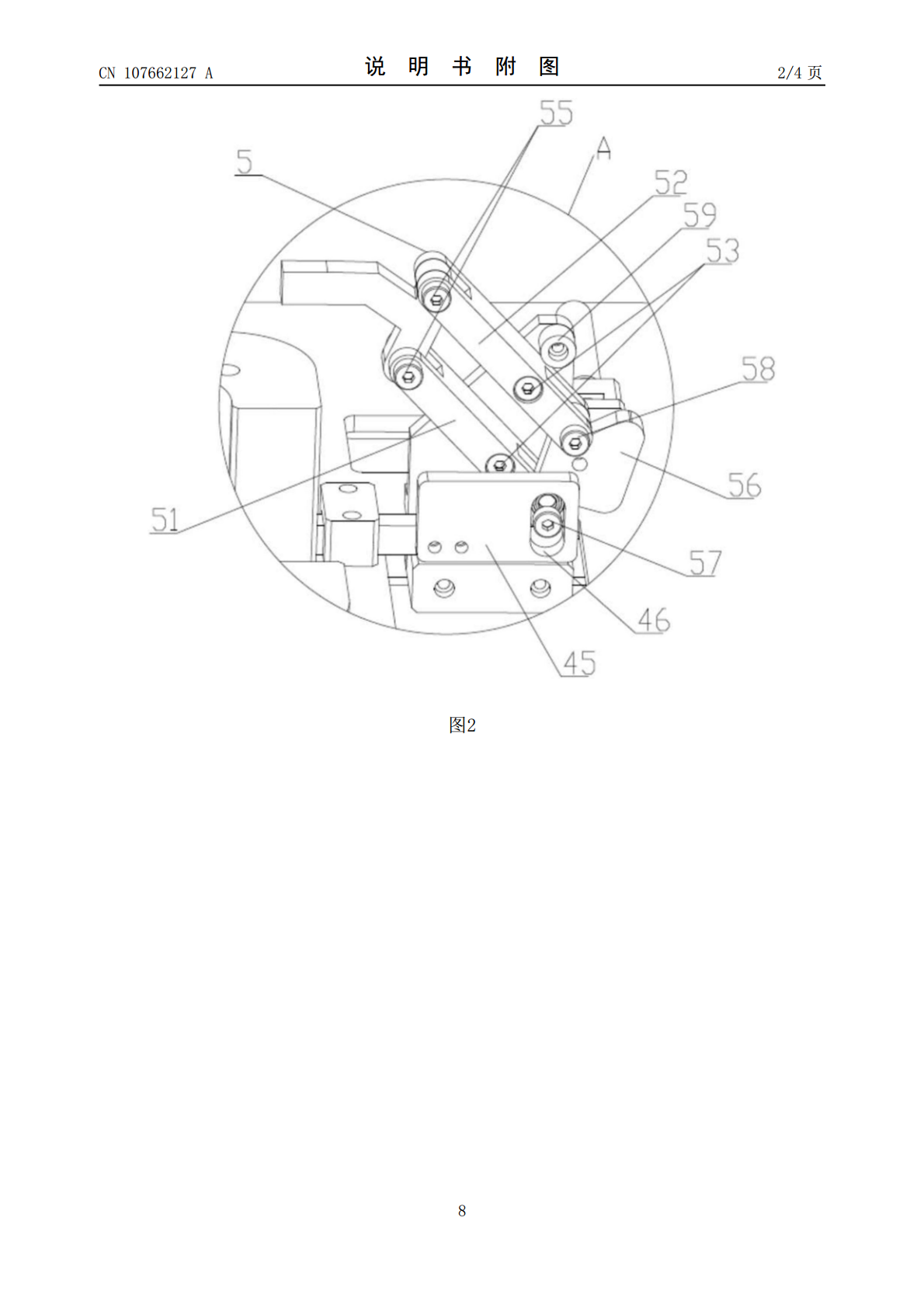
本发明揭示了一种四杆机构定位装置,包括底座,所述底座上设有限位装置,所述限位装置上设有一与需加工工件相匹配的收容空间,所述底座上还设有用于将所述工件定位在所述限位装置的收容空间内的定位装置,所述定位装置至少包括设置在所述收容空间内可上下移动的导轮组件,所述导轮组件的上下移动可通过四杆机构驱动按压头按压或释放所述工件。本发明的有益效果主要体现在:结构巧妙合理,非常便于工件的定位和装配,操作简便、不需要特殊、繁琐的紧固和拆卸操作,工作效率也得到极大的提高。

一种四排杆定位机构.pdf
本发明提供了一种四排杆定位机构,其可将马达定子精确定位于循环轨道的对应位置的各个工位。两段弧形轨道的首尾分别与对应侧的两端直线轨道的对应段相接、形成跑道型轨道结构,跑道型轨道结构的内侧设置有同步带,同步带的外侧均布固装有若干个治具支承座,治具支承座的底部限位卡装于跑道型轨道结构的轨道边,跑道型轨道结构支承于机座框架,每段平行的直线轨道的外侧分别设置有两个凸轮随动器,凸轮随动器包括一段平行于直线轨道的转轴,转轴上固装有一个凸轮驱动结构、以及至少一个凸轮定位结构,凸轮驱动结构的下端外接有直线驱动气缸,每个凸轮
定位杆机构、机芯以及钟表.pdf
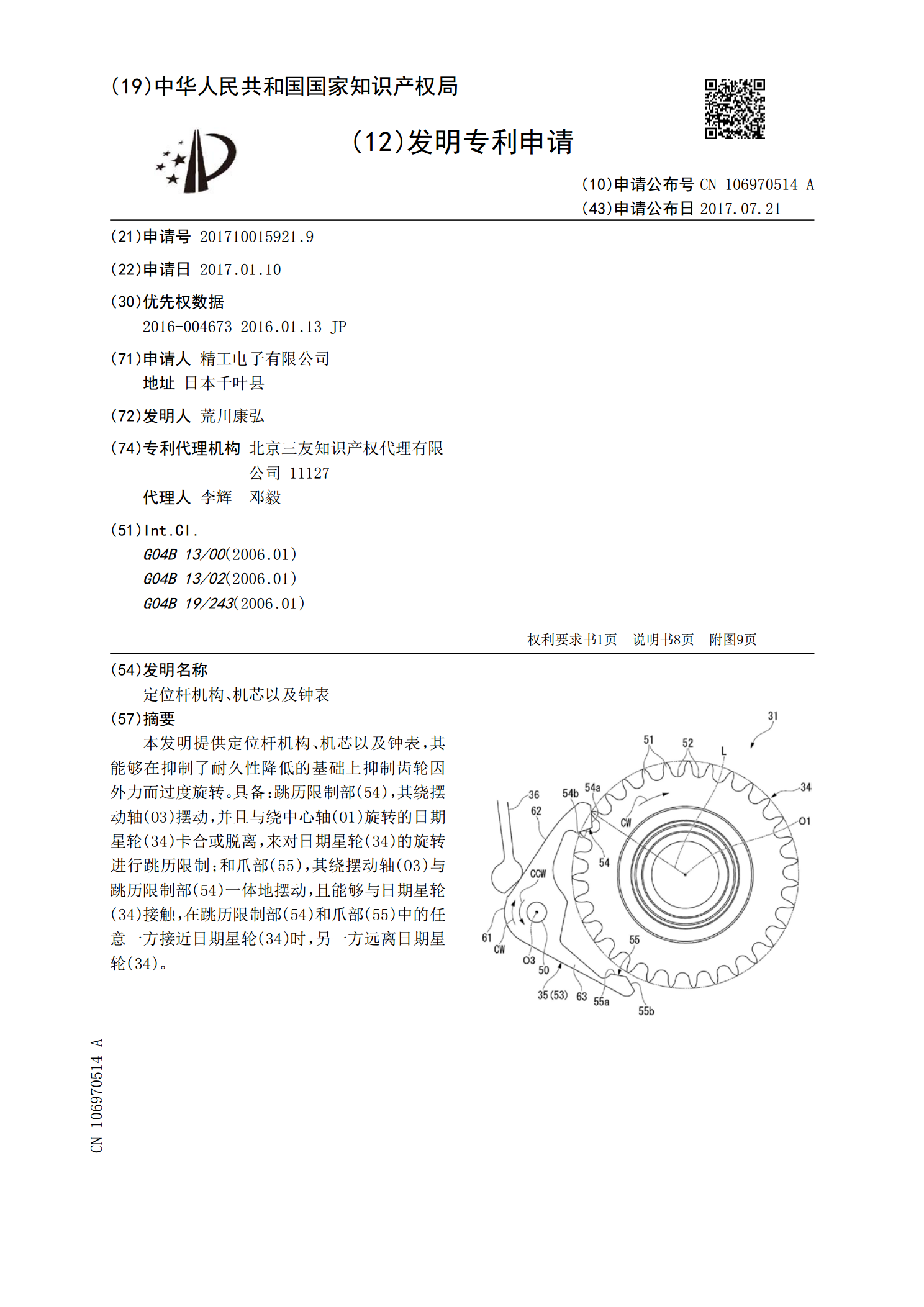
本发明提供定位杆机构、机芯以及钟表,其能够在抑制了耐久性降低的基础上抑制齿轮因外力而过度旋转。具备:跳历限制部(54),其绕摆动轴(O3)摆动,并且与绕中心轴(O1)旋转的日期星轮(34)卡合或脱离,来对日期星轮(34)的旋转进行跳历限制;和爪部(55),其绕摆动轴(O3)与跳历限制部(54)一体地摆动,且能够与日期星轮(34)接触,在跳历限制部(54)和爪部(55)中的任意一方接近日期星轮(34)时,另一方远离日期星轮(34)。

扭力杆抛丸定位装置.pdf
本发明提供一种扭力杆抛丸定位装置,包括支撑架,所述支撑架包括支撑轴,支撑轴上固定有数条呈放射状分布的支架,每条支架上均固定有数个底座,每个底座上均设有弹性管套,每个底座上均可放置一个扭力杆,可以充分利用空间,并一次抛丸过程就能处理大量扭力杆工件;套管的长度等于底座的高度与扭力杆下光滑部的高度之和,以保证扭力杆下光滑部定位的精确性;采用硅胶软管代替了现有技术中采用铁管保护扭力杆不需抛丸部分,硅胶软管能与扭力杆光滑部紧密贴合,避免丸料进入扭力杆光滑部。本发明提供的扭力杆抛丸定位装置,具有占用位置小,定位精确,

定位装置及其定位机构.pdf
一种定位装置,包括支撑件及相对设置于该支撑件上的两个定位机构,用以对放置于支撑件上且位于两个定位机构之间的工件进行定位。每一定位机构包括驱动件、装载件、齿条、齿轮及定位件,装载件活动装设于该支撑件上,装载件上开设有滑槽,齿条滑动设置于滑槽内,驱动件设置于支撑件上并与齿条固接;齿轮与装载件转动相接,且与齿条相啮合;定位件与该齿轮止转连接;驱动件能够驱动齿条于滑槽内远离工件滑动,进而带动定位件转动并伸入该工件内部。当齿条与该滑槽的端壁相抵,该驱动件带动该定位件继续运动,以实现两个定位机构中的定位件对工件施加两