
基于单应性的工业机械臂视觉轨迹跟踪迭代学习控制的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于单应性的工业机械臂视觉轨迹跟踪迭代学习控制的开题报告.docx
基于单应性的工业机械臂视觉轨迹跟踪迭代学习控制的开题报告摘要:工业机械臂在自动化生产流程中发挥着重要作用,而视觉轨迹跟踪技术在机械臂控制中也扮演着不可替代的角色。然而,工业生产环境中常常存在着光照、噪声等影响因素,导致传统的视觉轨迹跟踪方法无法满足应用需求。本文提出了一种基于单应性的工业机械臂视觉轨迹跟踪迭代学习控制方法,通过迭代学习可以逐步提高系统的鲁棒性和精度。关键词:工业机械臂,视觉轨迹跟踪,单应性,迭代学习,控制方法一、问题概述工业机械臂在现代生产流程中扮演着越来越重要的角色,可以实现高效、多样化
一种基于间歇迭代学习控制的平面机械臂轨迹跟踪方法.pdf
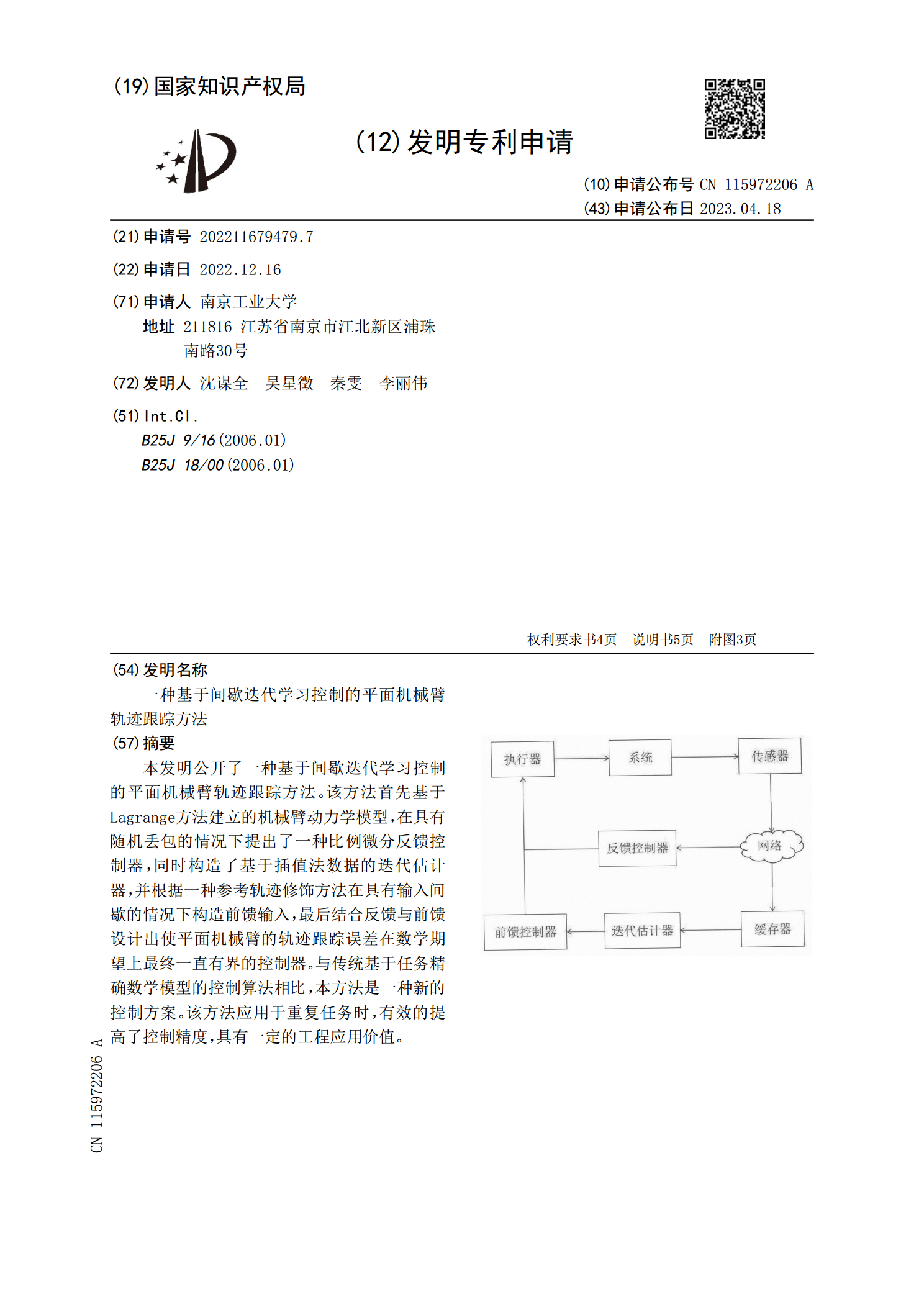
本发明公开了一种基于间歇迭代学习控制的平面机械臂轨迹跟踪方法。该方法首先基于Lagrange方法建立的机械臂动力学模型,在具有随机丢包的情况下提出了一种比例微分反馈控制器,同时构造了基于插值法数据的迭代估计器,并根据一种参考轨迹修饰方法在具有输入间歇的情况下构造前馈输入,最后结合反馈与前馈设计出使平面机械臂的轨迹跟踪误差在数学期望上最终一直有界的控制器。与传统基于任务精确数学模型的控制算法相比,本方法是一种新的控制方案。该方法应用于重复任务时,有效的提高了控制精度,具有一定的工程应用价值。

基于函数逼近的柔性机械臂变轨迹迭代学习控制的中期报告.docx
基于函数逼近的柔性机械臂变轨迹迭代学习控制的中期报告中期报告一、项目简介柔性机械臂在工业自动化领域中有着不可替代的作用,但由于其非线性、柔性、复杂的特性,传统的控制方法往往难以实现优秀的动态性能。为了提高柔性机械臂的控制精度和效率,本项目提出基于函数逼近的柔性机械臂变轨迹迭代学习控制方法。本项目旨在结合机器学习算法,通过对柔性机械臂终端执行器的运动轨迹进行对比学习,探索机器学习算法在柔性机械臂控制中的应用,实现柔性机械臂在不同工况下的精准控制。同时,为了保证控制效果的实时性和稳定性,本项目也将注重优化算法

基于函数逼近的柔性机械臂变轨迹迭代学习控制的综述报告.docx
基于函数逼近的柔性机械臂变轨迹迭代学习控制的综述报告柔性机械臂是一种主要由软材料和可变形材料制成的机械臂,以其高度的柔性和适应性而被广泛应用于许多需要高精度和高效率的应用领域。在机械臂的运动控制中,路径的规划和控制是至关重要的一环,影响着整个机械臂的运动精度和控制效率。近年来,基于函数逼近的柔性机械臂变轨迹迭代学习控制成为了研究的热点。本文将对该方法的研究现状进行综述。基于函数逼近的柔性机械臂变轨迹迭代学习控制的基本思路是采用以模型为基础的控制方法来实现路径控制与规划。具体而言,该方法通过使用基于神经网络

机械臂轨迹跟踪控制策略研究的开题报告.docx
机械臂轨迹跟踪控制策略研究的开题报告一、选题背景随着机器人应用领域的不断扩大,机器人技术也得到了快速发展。机械臂作为机器人的核心之一,在工业自动化、医疗卫生、航空航天等领域都有着广泛的应用。机械臂的移动是由电机驱动,在物体提取、装配、搬运等任务中发挥着重要作用。因此,实现对机械臂轨迹的精确控制是提高机械臂灵活性和效率的重要手段。机械臂轨迹控制的难点在于轨迹误差的积累,而轨迹误差的来源有多种,比如传感器误差、电机传动误差等。为了降低误差,必须设计出一种有效的轨迹控制策略来提高机械臂的运动精度和稳定性。二、研