
一种非接触四轮定位仪的车轮拍摄测量装置及测量方法.pdf

佳宁****么啦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种非接触四轮定位仪的车轮拍摄测量装置及测量方法.pdf
本专利提供一种非接触四轮定位仪车轮拍摄测量装置,该装置包括:计算机、标定目标板、侧拍摄装置,所述侧拍摄装置包括测量摄像机、辅助摄像机、运算处理单元、数据传输单元和LED辅助照明灯,并且所述测量摄像机平行放置并且二者的相对位置固定,所述辅助摄像机与测量摄像机相对位置固定。本专利也提供一种非接触四轮定位仪车轮测量方法,运用计算机视觉的方法,先通过图像处理找到轮毂边缘,然后对提取的轮毂边缘进行立体校正,使得左、右视域图像中提取的轮毂边缘统一到同一平面且行对准,从而校正后的左(右)图像中提取的轮毂边缘点在校正后的
非接触型机车轮径测量装置.pdf
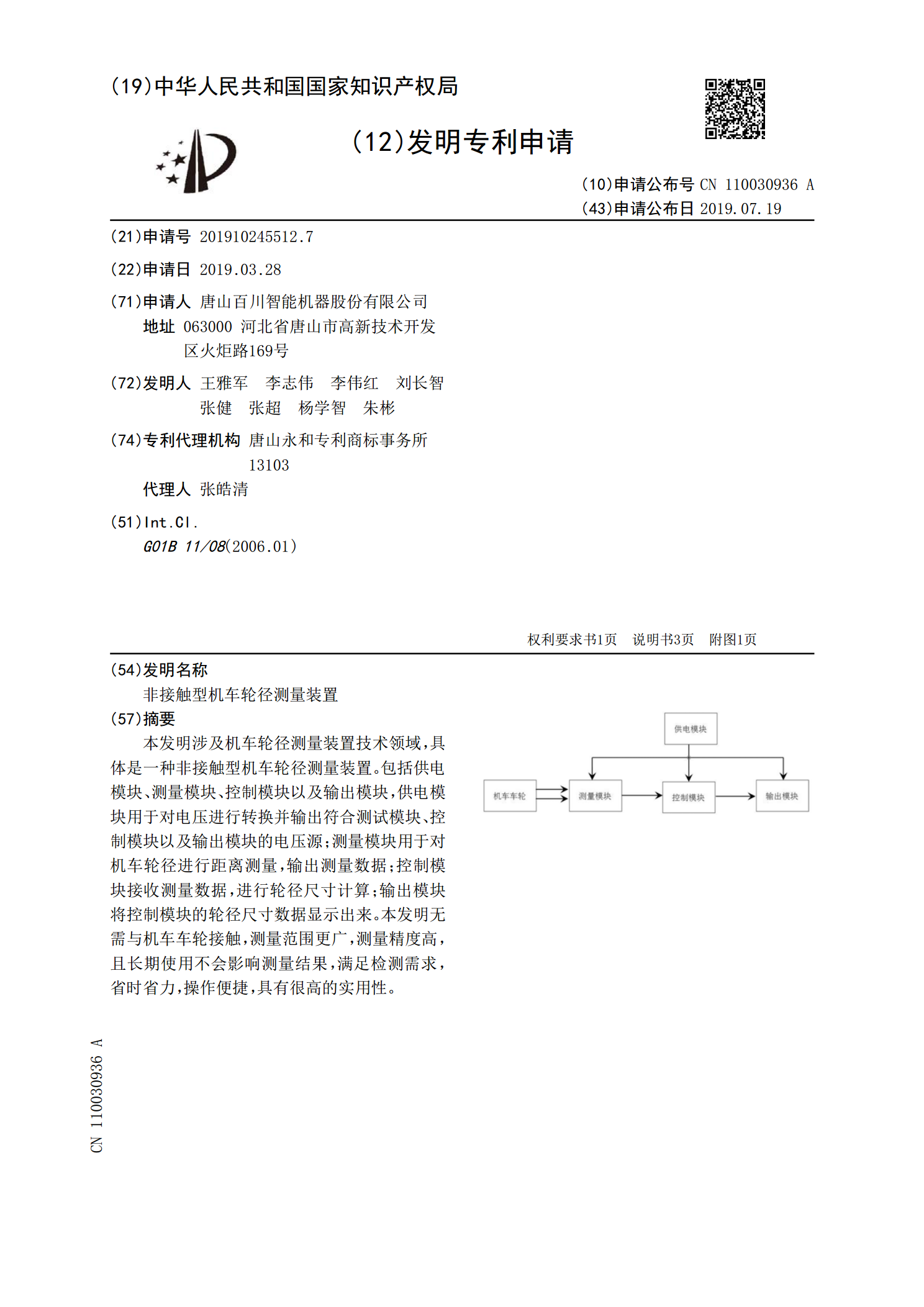
本发明涉及机车轮径测量装置技术领域,具体是一种非接触型机车轮径测量装置。包括供电模块、测量模块、控制模块以及输出模块,供电模块用于对电压进行转换并输出符合测试模块、控制模块以及输出模块的电压源;测量模块用于对机车轮径进行距离测量,输出测量数据;控制模块接收测量数据,进行轮径尺寸计算;输出模块将控制模块的轮径尺寸数据显示出来。本发明无需与机车车轮接触,测量范围更广,测量精度高,且长期使用不会影响测量结果,满足检测需求,省时省力,操作便捷,具有很高的实用性。

一种非接触式电位测量方法和装置.pdf
本申请公开了一种非接触式电位测量方法和装置,该方法包括:测量离散分布在积分路径上的多个电场强度值,其中所述积分路径为从电位待测点指向电位参考点的直线段;将所述多个电场强度值代入到用于求取电场强度沿所述积分路径的积分近似值的高斯—勒让德求积公式中,求取得到所述积分近似值,其中求取得到所述积分近似值即为所述电位待测点的电位近似值,从而解决了现有的电位测量装置在绝缘结构设计上投入成本巨大的问题。

非接触式手指变形测量装置及测量方法.pdf
本发明公开了一种非接触式手指变形测量装置及其方法,包括水平移动平台部分、高度调节部分和压力控制部分。所述的水平移动平台部分包括X、Y向步进电机、X、Y向移动平台、传感器支架和激光位移传感器;所述的高度调节部分包括基座、标尺、滑块、锁紧螺母、透明有机玻璃板和螺钉;所述的压力控制部分,包括压力表、两位电磁阀、比例压力阀。本发明采用非接触式测量方法测量手指变形的动态变化过程以及手指变形的轮廓,并且可以方便的调节手指与喷嘴之间的距离和喷嘴内的压力,改变手指的变形量。
一种钢水温度非接触软测量方法及装置.pdf
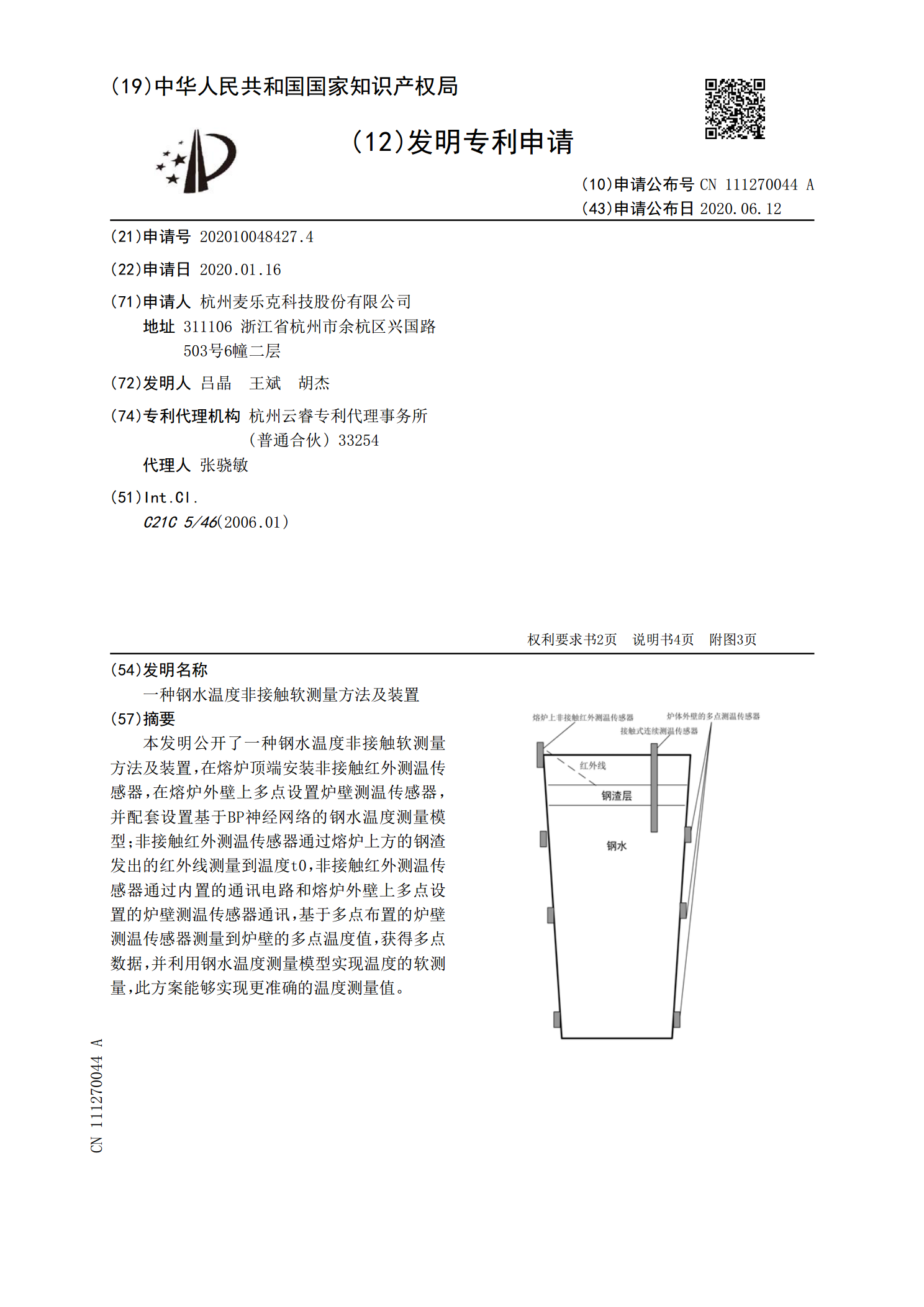
本发明公开了一种钢水温度非接触软测量方法及装置,在熔炉顶端安装非接触红外测温传感器,在熔炉外壁上多点设置炉壁测温传感器,并配套设置基于BP神经网络的钢水温度测量模型;非接触红外测温传感器通过熔炉上方的钢渣发出的红外线测量到温度t0,非接触红外测温传感器通过内置的通讯电路和熔炉外壁上多点设置的炉壁测温传感器通讯,基于多点布置的炉壁测温传感器测量到炉壁的多点温度值,获得多点数据,并利用钢水温度测量模型实现温度的软测量,此方案能够实现更准确的温度测量值。