
一种车轮轮径修正方法、装置及设备.pdf

猫巷****奕声


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车轮轮径修正方法、装置及设备.pdf
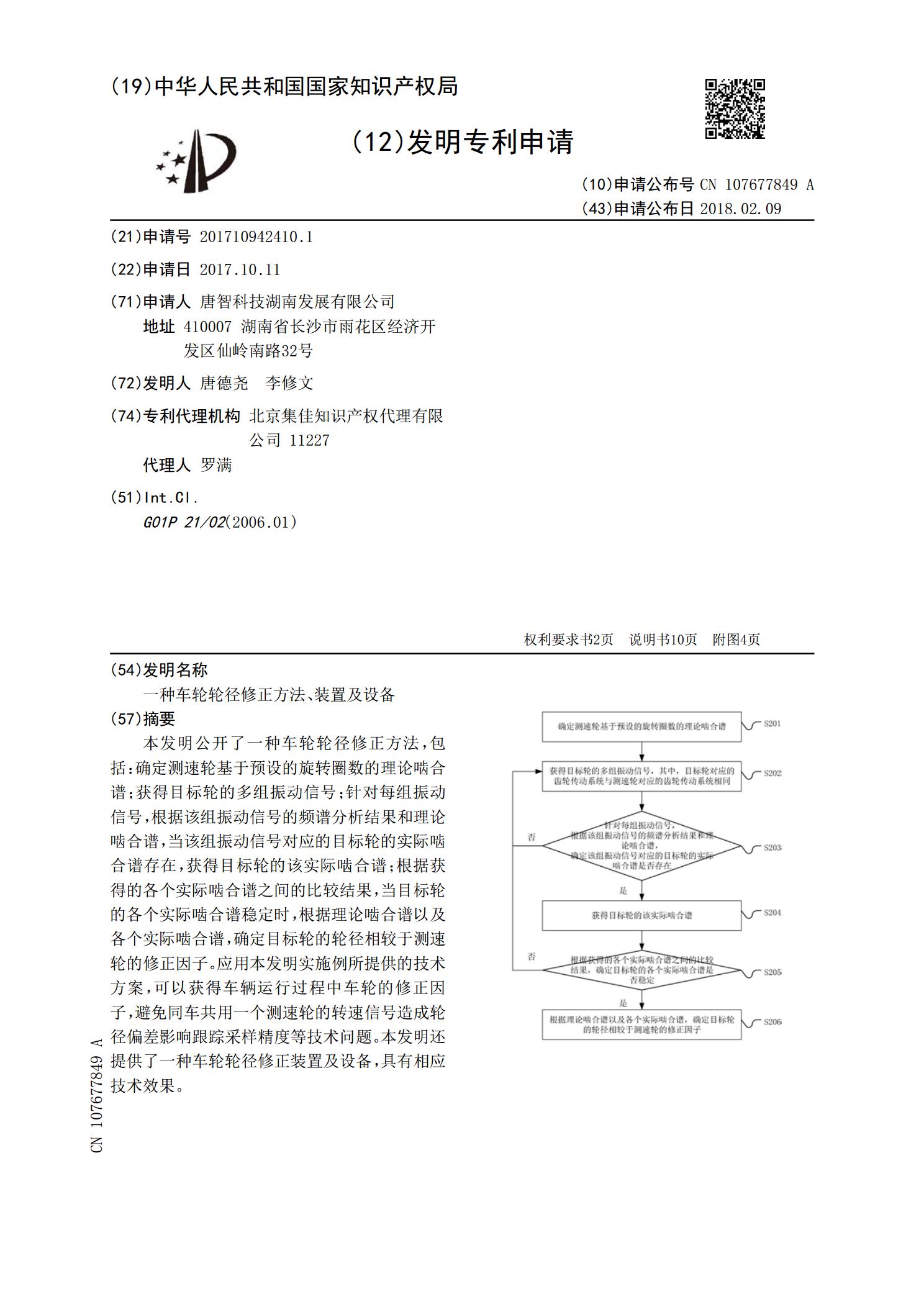
本发明公开了一种车轮轮径修正方法,包括:确定测速轮基于预设的旋转圈数的理论啮合谱;获得目标轮的多组振动信号;针对每组振动信号,根据该组振动信号的频谱分析结果和理论啮合谱,当该组振动信号对应的目标轮的实际啮合谱存在,获得目标轮的该实际啮合谱;根据获得的各个实际啮合谱之间的比较结果,当目标轮的各个实际啮合谱稳定时,根据理论啮合谱以及各个实际啮合谱,确定目标轮的轮径相较于测速轮的修正因子。应用本发明实施例所提供的技术方案,可以获得车辆运行过程中车轮的修正因子,避免同车共用一个测速轮的转速信号造成轮径偏差影响跟踪

一种轮径修正方法、装置、设备及可读存储介质.pdf
本发明公开了一种轮径修正方法,包括:在预设的周期内采集多个轮对的速度信号;判断各个轮对的速度信号是否超过预设的阈值;若否,则将采集到的最大速度信号确定为目标信号,将采集到的各个轮对的速度信号与目标信号的比值,确定为各个轮对的修正系数,并根据各个轮对的修正系数计算各个轮对的速度修正值。该方法依据采集到的各个轮对的速度信号,确定出各个轮对的修正系数,并依据修正系数计算各个轮对的速度修正值,从而可使各个轮对的速度处于同一基准条件下,为防滑系统提供准确的判别依据,提高防滑系统的性能和可靠性,保障了机车的运行安全。
车轮轮径检测装置.pdf
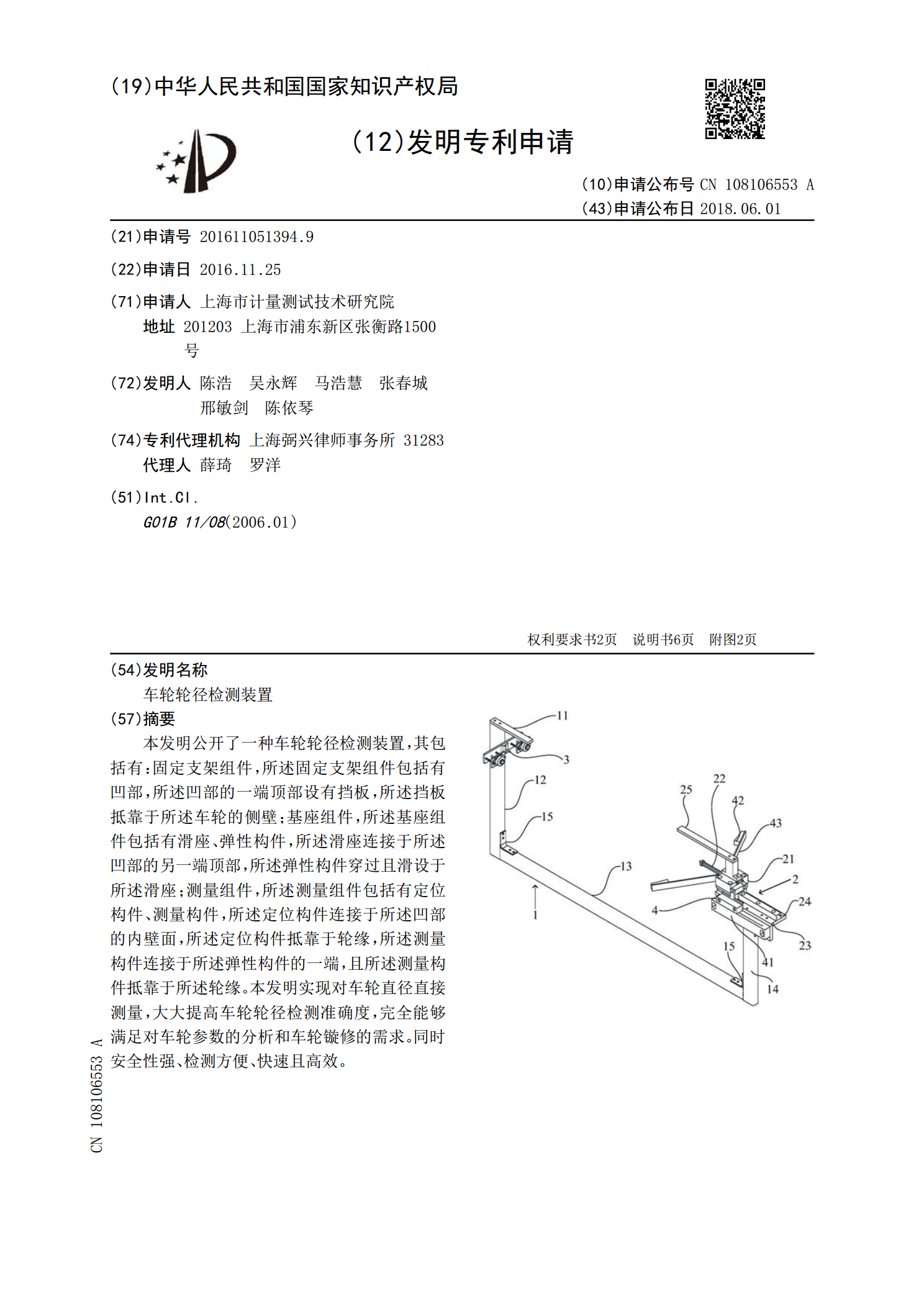
本发明公开了一种车轮轮径检测装置,其包括有:固定支架组件,所述固定支架组件包括有凹部,所述凹部的一端顶部设有挡板,所述挡板抵靠于所述车轮的侧壁;基座组件,所述基座组件包括有滑座、弹性构件,所述滑座连接于所述凹部的另一端顶部,所述弹性构件穿过且滑设于所述滑座;测量组件,所述测量组件包括有定位构件、测量构件,所述定位构件连接于所述凹部的内壁面,所述定位构件抵靠于轮缘,所述测量构件连接于所述弹性构件的一端,且所述测量构件抵靠于所述轮缘。本发明实现对车轮直径直接测量,大大提高车轮轮径检测准确度,完全能够满足对车轮
一种列车轮径校验方法及装置.pdf
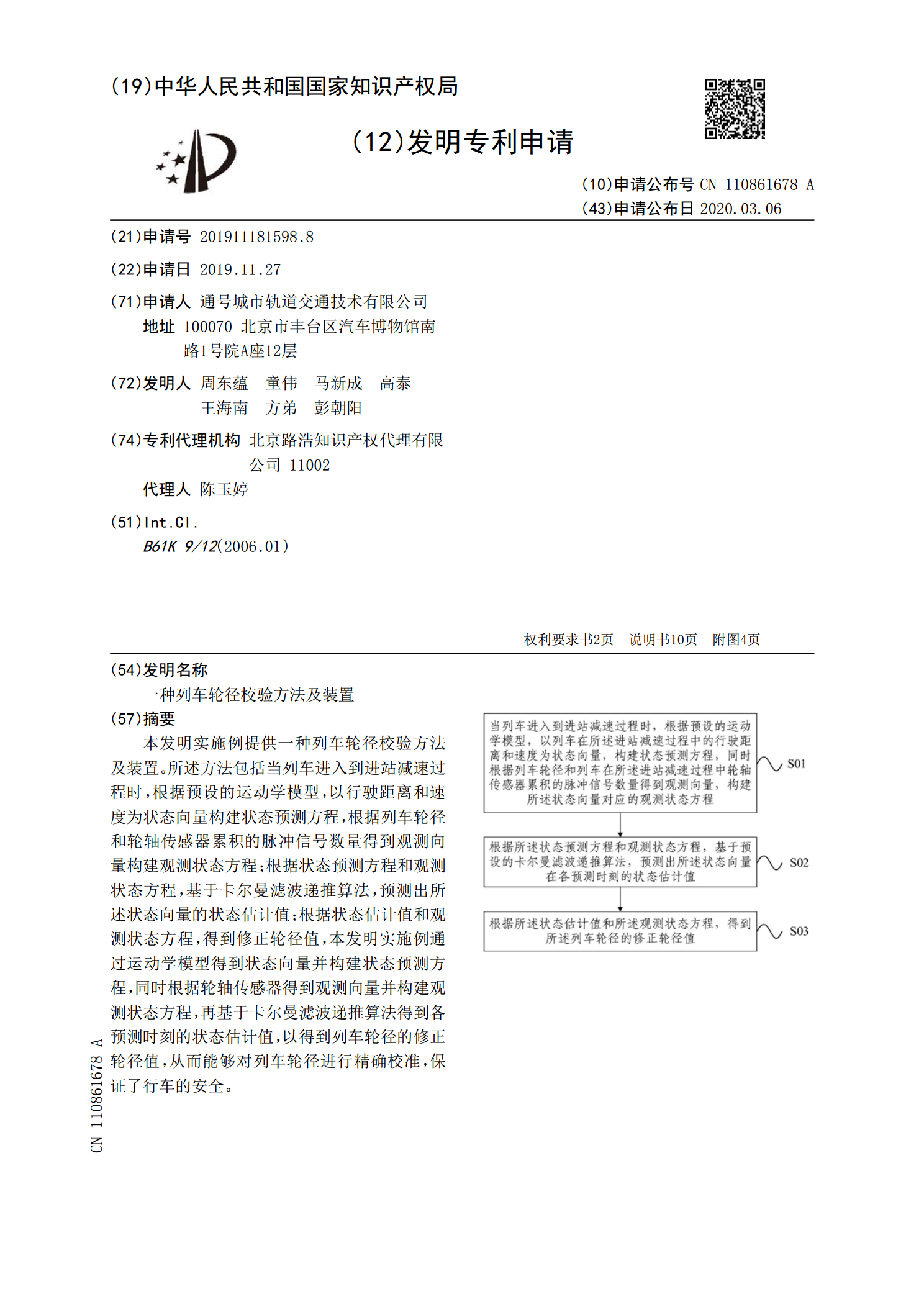
本发明实施例提供一种列车轮径校验方法及装置。所述方法包括当列车进入到进站减速过程时,根据预设的运动学模型,以行驶距离和速度为状态向量构建状态预测方程,根据列车轮径和轮轴传感器累积的脉冲信号数量得到观测向量构建观测状态方程;根据状态预测方程和观测状态方程,基于卡尔曼滤波递推算法,预测出所述状态向量的状态估计值;根据状态估计值和观测状态方程,得到修正轮径值,本发明实施例通过运动学模型得到状态向量并构建状态预测方程,同时根据轮轴传感器得到观测向量并构建观测状态方程,再基于卡尔曼滤波递推算法得到各预测时刻的状态估

一种车轮平衡自动修正装置.pdf
本发明一种车轮平衡自动修正装置,属于汽车生产机械装备领域。本发明的技术方案是:一种车轮平衡自动修正装置由出料机构、打块机构、修正托盘机构、翻转机构及护栏组成。修正托盘机构将车轮托举到修正位置,通过外部通讯提供不平衡量数据,出料机构选取相应的平衡块提供给打块机构,由其将平衡块固定至车轮轮辋A面不平衡点位置,之后由翻转机构将车轮翻转并旋转至车轮B面不平衡点位置,出料机构选取相应的平衡块提供给打块机构,由其将平衡块固定至车轮轮辋B面不平衡点位置,最终实现车轮不平衡量的修正工作。本发明的优点在于减少人为误差及平衡