
基于深度强化学习的室内机器人场景主动识别方法.pdf

春景****23


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于深度强化学习的室内机器人场景主动识别方法.pdf
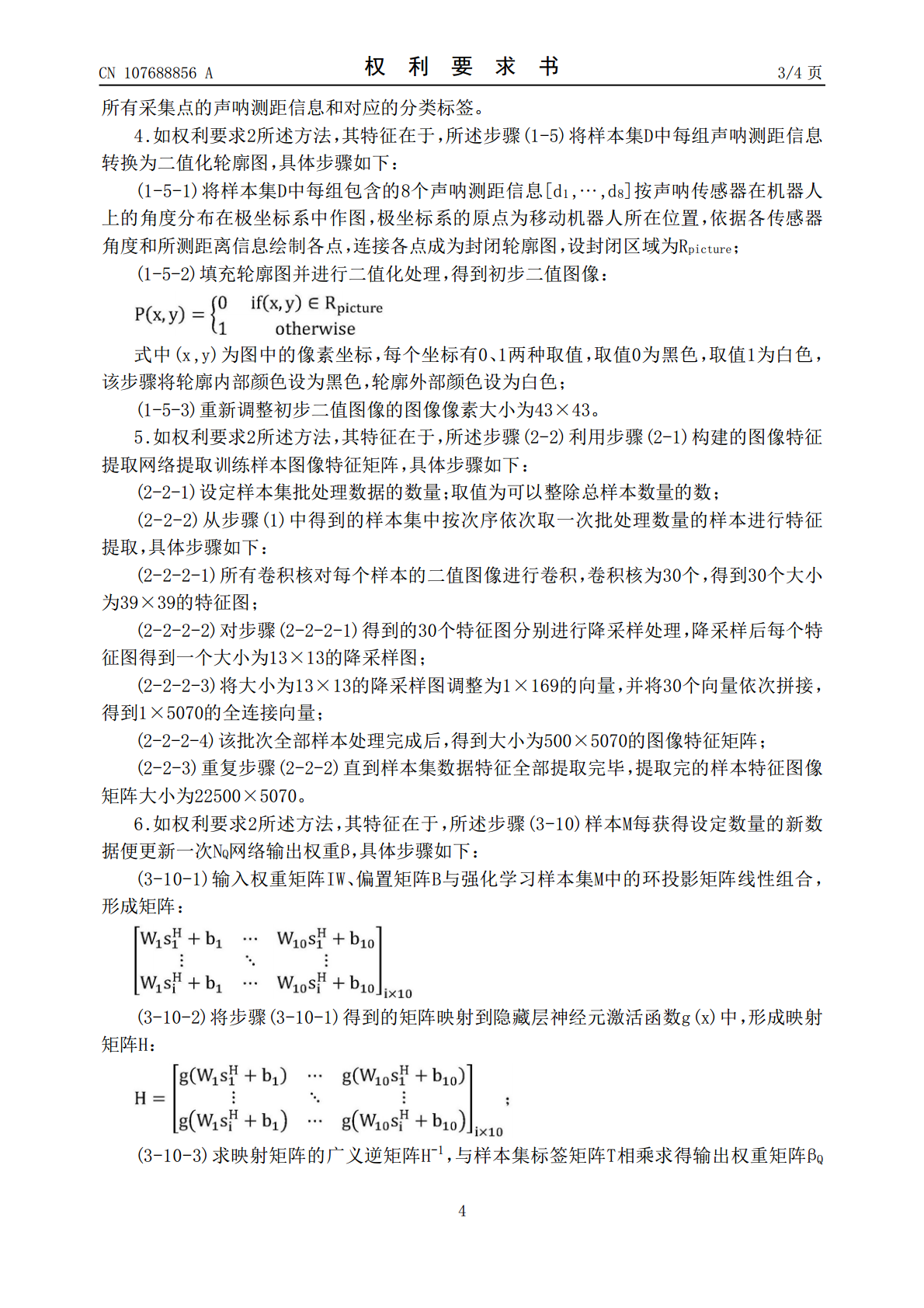
本发明提供了一种基于深度强化学习的室内机器人场景主动识别方法,属于机器学习领域和机器人技术领域。该方法包括:训练一个能够识别声呐信息二值化轮廓图环投影向量的分类神经网络N

基于深度学习的场景识别方法综述.docx
基于深度学习的场景识别方法综述基于深度学习的场景识别方法综述摘要:随着深度学习的快速发展,场景识别已经逐渐成为计算机视觉领域的一个重要任务。本文对基于深度学习的场景识别方法进行了综述,并对其在实际应用中的表现进行了评估。我们首先简要介绍了场景识别的背景和意义,然后介绍了深度学习的基本原理,以及在场景识别中的应用。接着,我们详细讨论了几种常用的基于深度学习的场景识别方法,并分析了它们的优缺点。最后,我们总结了当前的研究现状,并展望了未来的发展方向。1.引言场景识别是指通过计算机视觉技术,将图像或视频中的场景
一种基于深度学习的场景识别方法.pdf
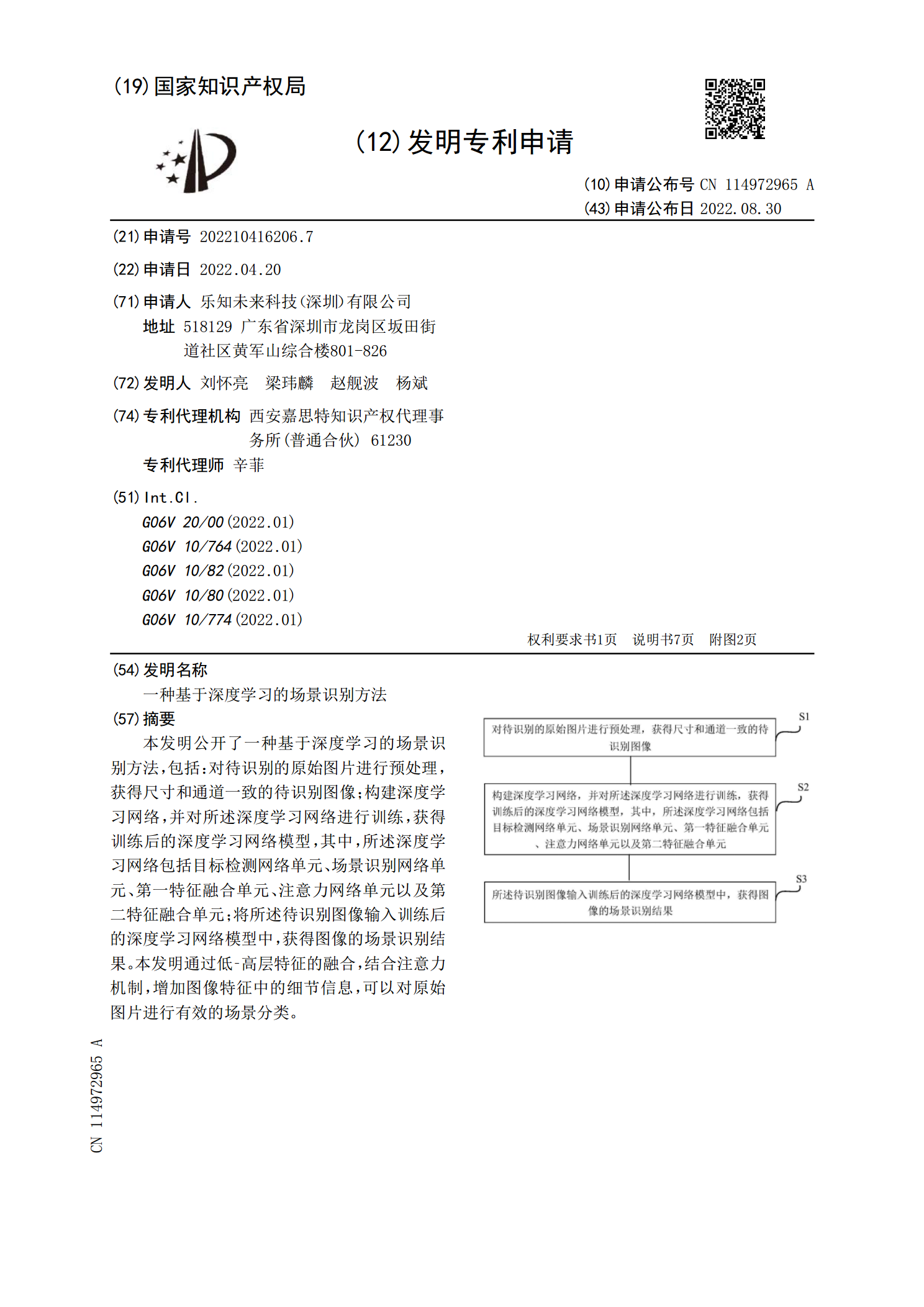
本发明公开了一种基于深度学习的场景识别方法,包括:对待识别的原始图片进行预处理,获得尺寸和通道一致的待识别图像;构建深度学习网络,并对所述深度学习网络进行训练,获得训练后的深度学习网络模型,其中,所述深度学习网络包括目标检测网络单元、场景识别网络单元、第一特征融合单元、注意力网络单元以及第二特征融合单元;将所述待识别图像输入训练后的深度学习网络模型中,获得图像的场景识别结果。本发明通过低‑高层特征的融合,结合注意力机制,增加图像特征中的细节信息,可以对原始图片进行有效的场景分类。

一种基于深度强化学习的室内声学行为识别方法.docx
一种基于深度强化学习的室内声学行为识别方法1.引言在智能家居系统中,室内声学行为识别是非常重要的一个环节。它可以对室内的声音进行分类和识别,并且可以将多个声源进行区分,从而实现智能控制和管理。对于传统的基于信号处理的方法,由于存在多个难以控制的因素,如噪声干扰、信号复杂性等,其识别效果难以达到实用的应用标准。因此,本文提出了一种基于深度强化学习的室内声学行为识别方法,旨在提高识别准确率和鲁棒性。2.相关工作应用深度学习算法进行声学行为识别已取得了较好的效果。Song等人提出了一种基于卷积神经网络(CNN)

基于深度学习的场景文字检测与识别方法研究的开题报告.docx
基于深度学习的场景文字检测与识别方法研究的开题报告一、选题背景随着智能化、数字化时代的到来,人们对于计算机视觉的需求越来越大。在计算机视觉任务中,场景文字检测与识别一直是研究的热点之一。由于现实场景中的文字具有多样性、复杂性和不规律性,传统的场景文字检测与识别方法面临着很多的挑战,例如各种光照条件下的文字识别、文字变形和背景噪声较大时的文字检测等。近年来,深度学习技术的发展为解决这些问题提供了一种有效的方法。因此,基于深度学习的场景文字检测与识别方法研究具有重要的意义。二、选题意义1.实际应用价值场景文字