
压缩编码光谱成像系统的编码模板矩阵优化设计方法.pdf

依波****bc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

压缩编码光谱成像系统的编码模板矩阵优化设计方法.pdf
本发明涉及一种压缩编码光谱成像系统的编码模板矩阵优化设计方法,其具体步骤是:1)随机产生m个编码模板矩阵B;2)计算编码模板矩阵B的适应度值;3)利用旋转轮盘方法对上述编码模板矩阵进行子代选择;4)对选择得到的子代编码模板矩阵进行交叉处理;5)对交叉得到的子代编码模板矩阵进行变异处理,并判断是否满足迭代条件,若满足条件,则迭代结束,若不满足条件,返回步骤2);6)在经过步骤5)处理后的编码模板矩阵中选择最优的编码模板矩阵;本发明通过基于约束等距性条件和传输噪声最小化要求的遗传优化,将编码模板矩阵设计准则进

单色散压缩编码光谱成像系统研究.docx
单色散压缩编码光谱成像系统研究随着光学技术的快速发展,光谱技术因其高光谱分辨率和无损测量等优势成为了各行业研究的重点。其中,压缩编码光谱成像技术因其快速成像和高光谱分辨率的特点,在航空、遥感、生物学等领域得到了广泛应用。然而,其成像速度与分辨率存在一定的矛盾,使得其应用受到一定的限制。为了解决此问题,单色散压缩编码光谱成像技术应运而生。单色散压缩编码光谱成像系统是利用压缩编码技术对分辨率进行压缩,从而提高光谱成像速度的一种光谱成像技术。与传统压缩编码光谱成像技术不同的是,其利用单色散的特点直接对目标场景进

压缩感知光谱成像技术的编码孔径与探测器匹配优化.pptx
压缩感知光谱成像技术的编码孔径与探测器匹配优化目录添加目录项标题压缩感知光谱成像技术概述压缩感知基本原理光谱成像技术简介编码孔径与探测器匹配的重要性编码孔径优化设计编码孔径的种类与特点编码孔径的设计原则编码孔径优化实例分析探测器性能匹配与选择探测器性能参数探测器类型与特点探测器性能匹配原则探测器选择实例分析编码孔径与探测器的联合优化联合优化方法概述基于遗传算法的优化方法基于粒子群算法的优化方法联合优化实例分析编码孔径与探测器匹配优化的实验验证实验平台搭建实验结果分析结果对比与讨论实验验证结论结论与展望编码
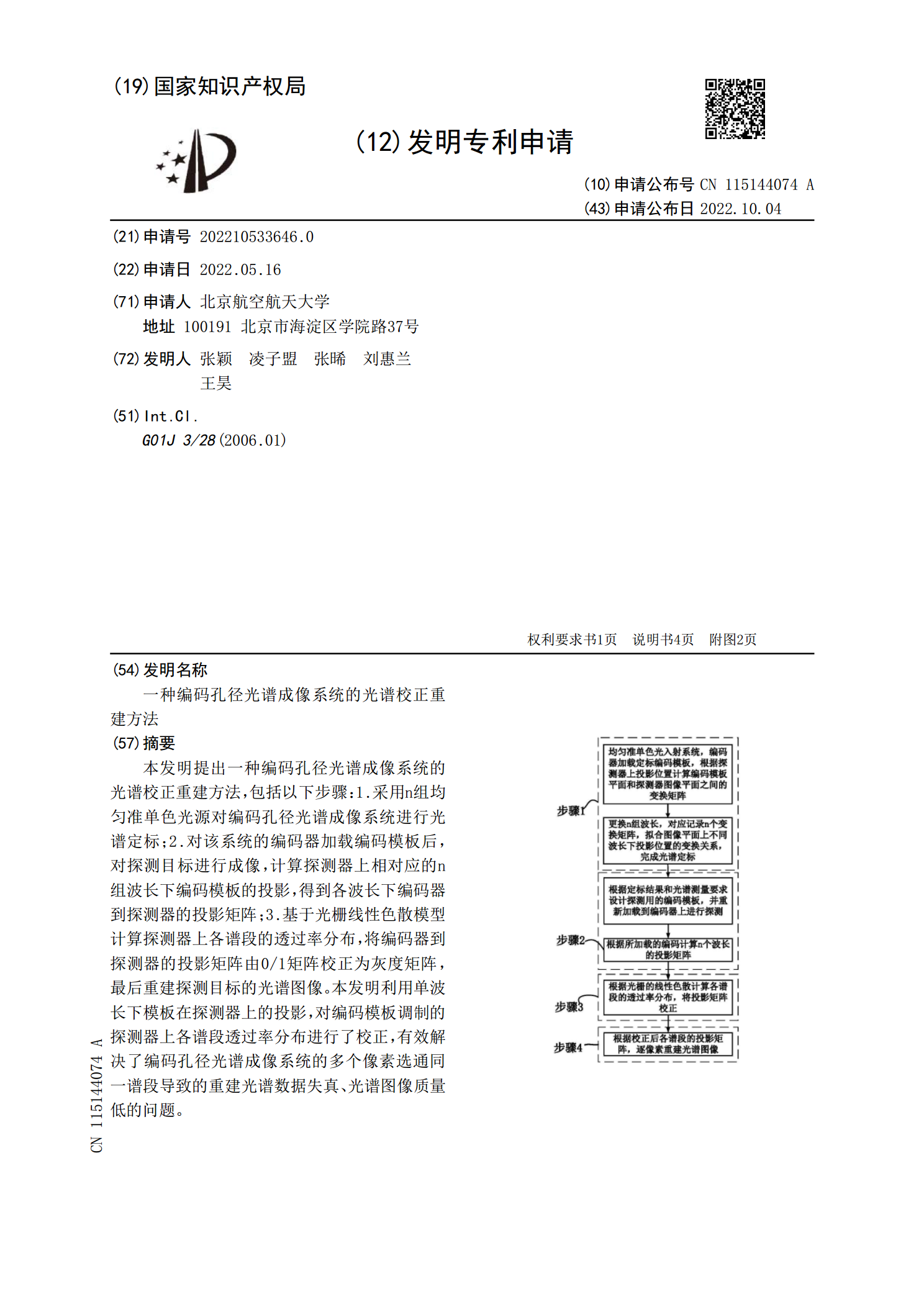
一种编码孔径光谱成像系统的光谱校正重建方法.pdf
本发明提出一种编码孔径光谱成像系统的光谱校正重建方法,包括以下步骤:1.采用n组均匀准单色光源对编码孔径光谱成像系统进行光谱定标;2.对该系统的编码器加载编码模板后,对探测目标进行成像,计算探测器上相对应的n组波长下编码模板的投影,得到各波长下编码器到探测器的投影矩阵;3.基于光栅线性色散模型计算探测器上各谱段的透过率分布,将编码器到探测器的投影矩阵由0/1矩阵校正为灰度矩阵,最后重建探测目标的光谱图像。本发明利用单波长下模板在探测器上的投影,对编码模板调制的探测器上各谱段透过率分布进行了校正,有效解决了
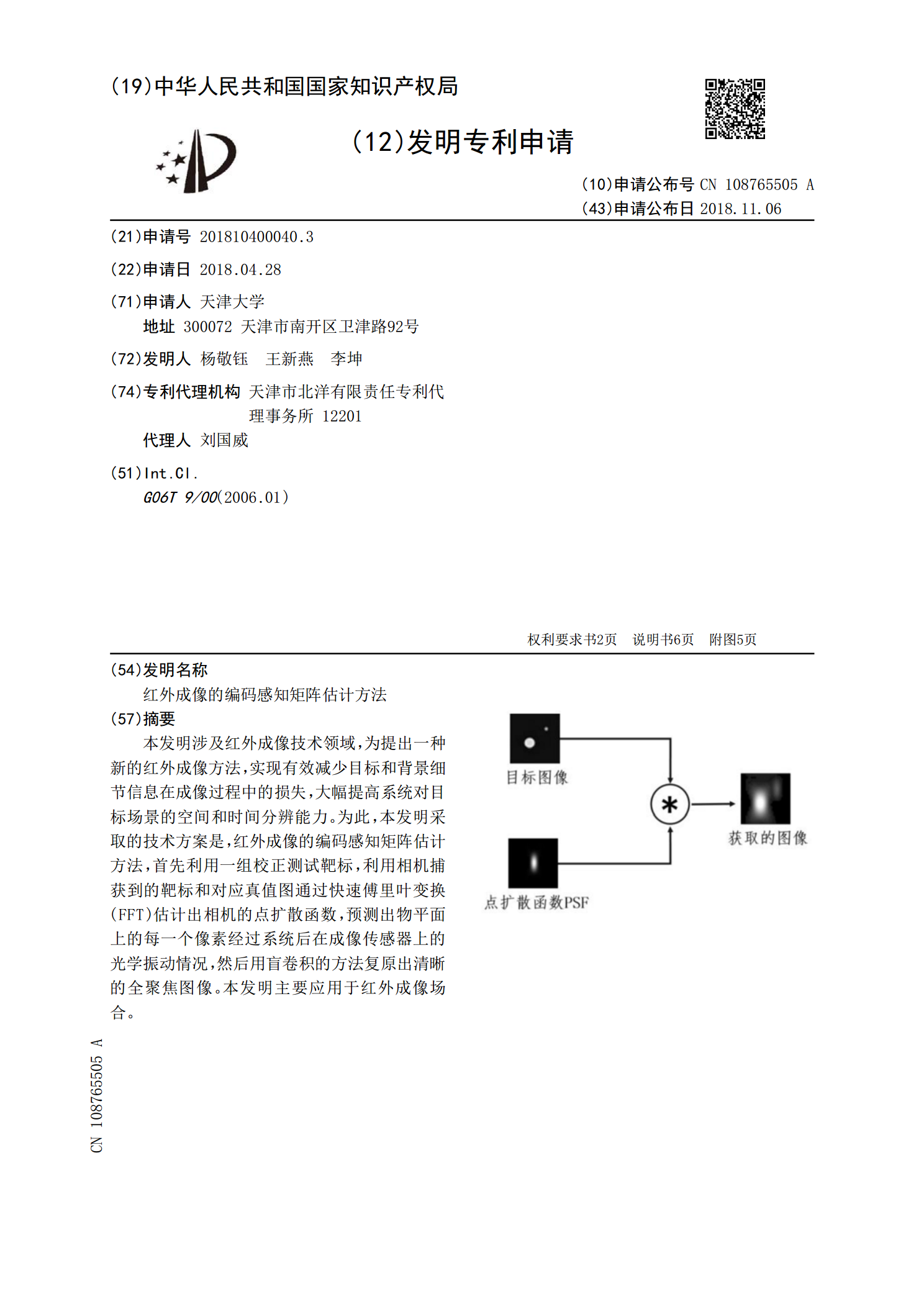
红外成像的编码感知矩阵估计方法.pdf
本发明涉及红外成像技术领域,为提出一种新的红外成像方法,实现有效减少目标和背景细节信息在成像过程中的损失,大幅提高系统对目标场景的空间和时间分辨能力。为此,本发明采取的技术方案是,红外成像的编码感知矩阵估计方法,首先利用一组校正测试靶标,利用相机捕获到的靶标和对应真值图通过快速傅里叶变换(FFT)估计出相机的点扩散函数,预测出物平面上的每一个像素经过系统后在成像传感器上的光学振动情况,然后用盲卷积的方法复原出清晰的全聚焦图像。本发明主要应用于红外成像场合。