
一种汽车轮胎偏转角度测量装置及测量方法.pdf

睿达****的的


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种汽车轮胎偏转角度测量装置及测量方法.pdf
本发明公开了一种汽车轮胎偏转角度测量装置及测量方法。汽车轮胎偏转角度测量装置包括电源模块、角度测量模块、控制模块、无线通讯模块、显示模块;所述测量装置将上述模块集成在一起嵌入到汽车方向盘套中;汽车轮胎偏转角度测量方法包括以下步骤:步骤S1:角度测量模块对汽车方向盘的偏转角度进行检测并将偏转角度数据传送到控制模块;控制模块通过汽车方向盘偏转角度与汽车轮胎偏转角度之间的转向比关系,对汽车方向盘偏转角度进行处理解算,得到汽车轮胎的偏转角度;步骤S2:控制模块控制无线通讯模块把汽车轮胎偏转角度数据传送到显示模块。

一种角度测量装置及其测量方法.pdf
本发明提供了一种角度测量装置和测量方法,包括支架、滚轮组、第一齿轮组、第二齿轮组、轴系、角度测量部分和径向尺寸测量部分,第一滚轮通过第一齿轮组将运动传递给主刻度条,第二滚轮通过第二齿轮组将运动传递给游标刻度条,实现将滚轮的圆周运动转化为齿条的直线水平运动。本发明对被测零件端面圆圆心没有依赖性,以零件的外圆或内孔做测量基准,即可准确的测量零件的具体角度,适用于对旋转角度的测量,特别适用于工程机械中类似大型齿轮或齿圈类零部件角度的测量。
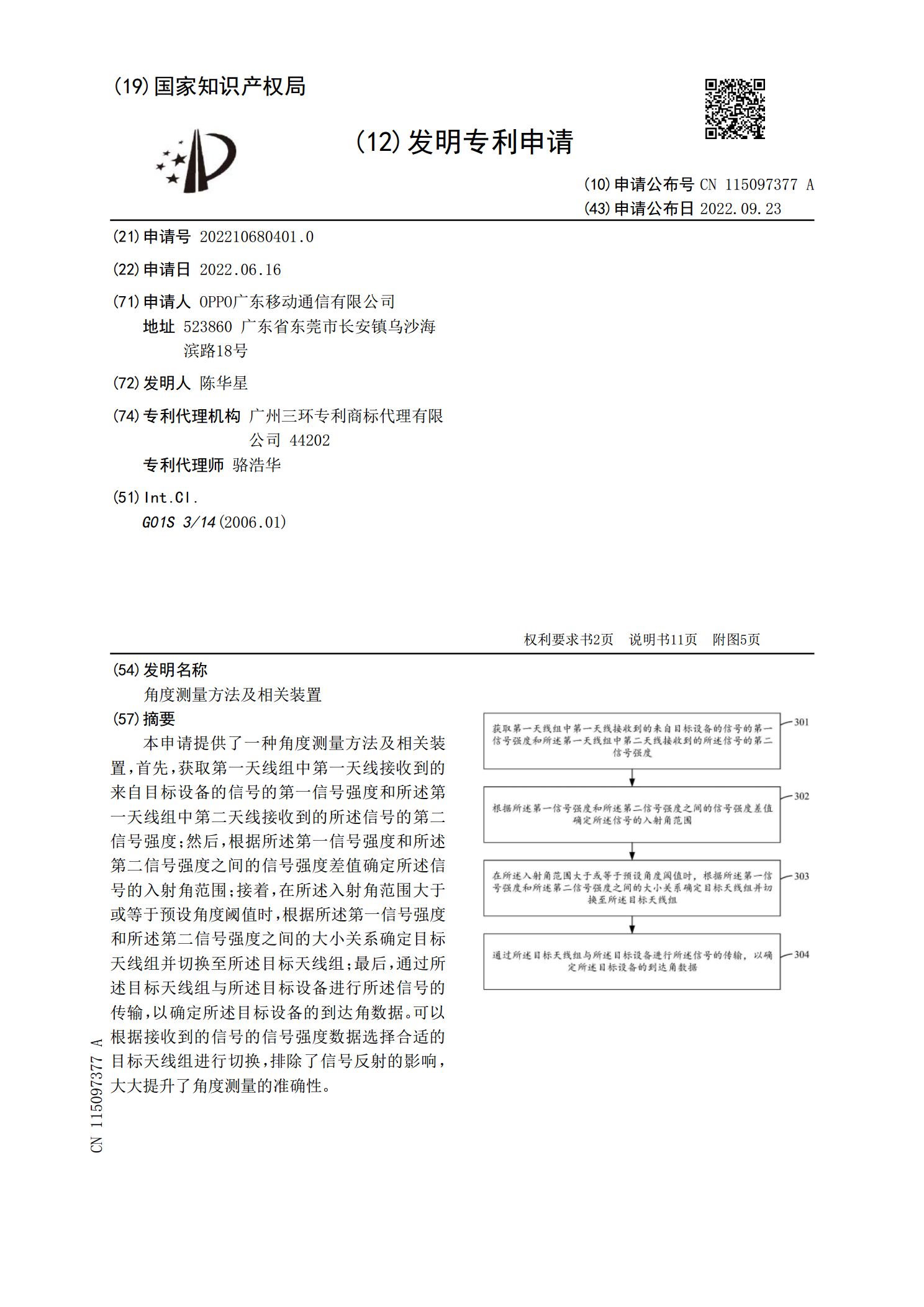
角度测量方法及相关装置.pdf
本申请提供了一种角度测量方法及相关装置,首先,获取第一天线组中第一天线接收到的来自目标设备的信号的第一信号强度和所述第一天线组中第二天线接收到的所述信号的第二信号强度;然后,根据所述第一信号强度和所述第二信号强度之间的信号强度差值确定所述信号的入射角范围;接着,在所述入射角范围大于或等于预设角度阈值时,根据所述第一信号强度和所述第二信号强度之间的大小关系确定目标天线组并切换至所述目标天线组;最后,通过所述目标天线组与所述目标设备进行所述信号的传输,以确定所述目标设备的到达角数据。可以根据接收到的信号的信号

一种全角度ETV测量装置及测量方法.pdf
本发明公开了一种全角度ETV测量装置及测量方法,全角度ETV测量装置,包括支撑台、转轴、第一测量靠块、第二测量靠块、支柱、安装架和测量表;支撑台表面设有滑道,滑道的横截面为留有缺口的圆形;转轴垂直安装在支撑台上、且与滑道圆心设置;第一测量靠块和第二测量靠块上均有直线状的测量边,测量边的一端均可旋转地连接在转轴上,两个测量边之间的夹角可在0~180°之间任意调整;第一测量靠块和第二测量靠块通过定位件与滑道滑动配合、且均可与滑道相对固定;支柱垂直安装在支撑台上;安装架安装在支柱上,测量表安装在安装架上。上述装
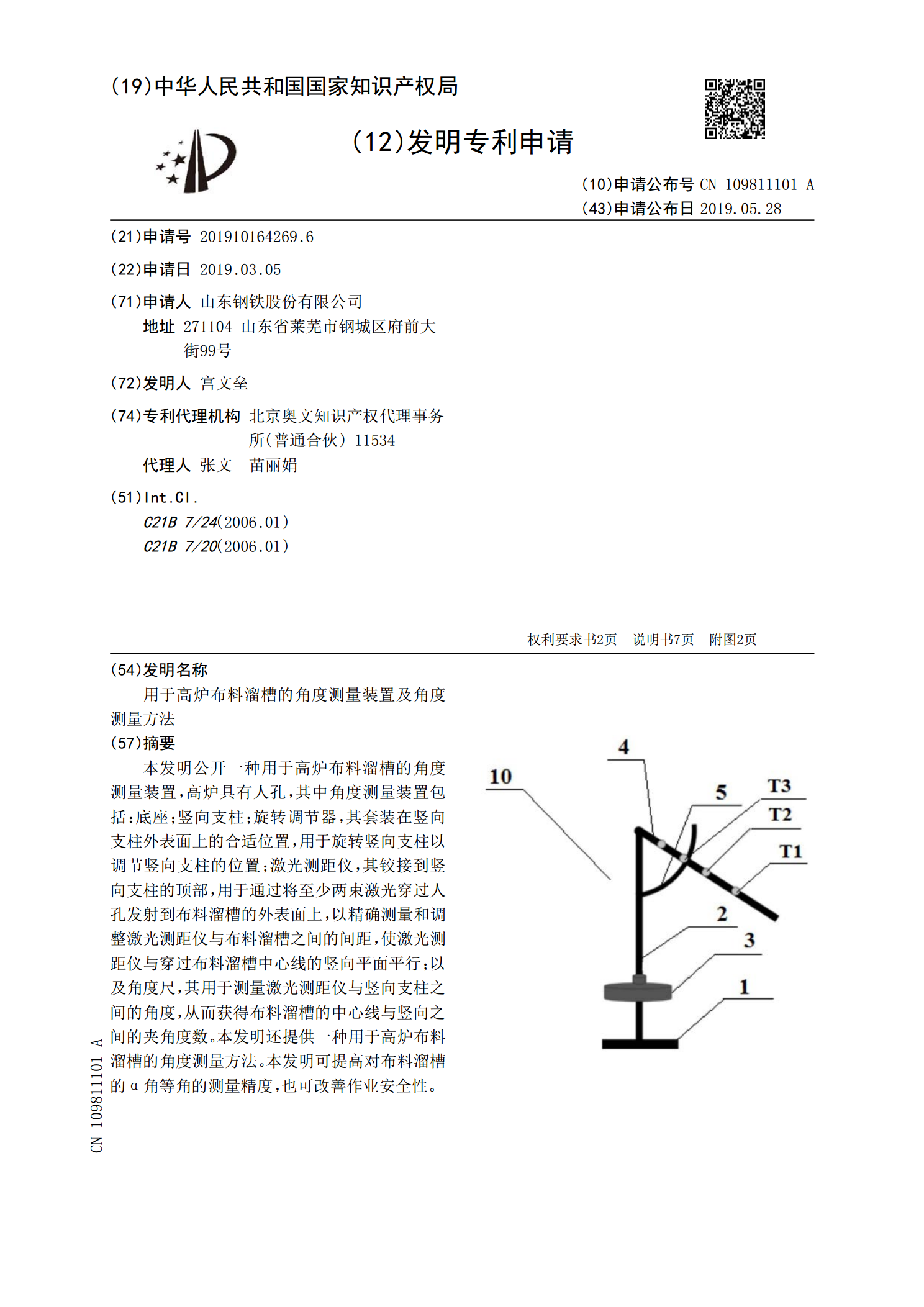
用于高炉布料溜槽的角度测量装置及角度测量方法.pdf
本发明公开一种用于高炉布料溜槽的角度测量装置,高炉具有人孔,其中角度测量装置包括:底座;竖向支柱;旋转调节器,其套装在竖向支柱外表面上的合适位置,用于旋转竖向支柱以调节竖向支柱的位置;激光测距仪,其铰接到竖向支柱的顶部,用于通过将至少两束激光穿过人孔发射到布料溜槽的外表面上,以精确测量和调整激光测距仪与布料溜槽之间的间距,使激光测距仪与穿过布料溜槽中心线的竖向平面平行;以及角度尺,其用于测量激光测距仪与竖向支柱之间的角度,从而获得布料溜槽的中心线与竖向之间的夹角度数。本发明还提供一种用于高炉布料溜槽的角度