
一种仿生负泊松比结构非充气弹性车轮及其设计方法.pdf

秀华****魔王

1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种仿生负泊松比结构非充气弹性车轮及其设计方法.pdf
本发明公开了一种仿生负泊松比结构非充气弹性车轮及其设计方法,负泊松比结构非充气弹性车轮系统由车轮外胎、负泊松比结构弹性支撑体、轮辐、内轮辋和外轮辋组成。首先根据负泊松比结构的形状特征建立其参数化模型,利用拉丁超立方实验设计方法和响应面模型建立负泊松比结构的响应面模型,分别利用多目标粒子群优化算法在外循环进行多目标优化设计和径向基重要性抽样技术在内循环进行可靠性分析,获取仿生负泊松比结构非充气弹性车轮的最优化可靠性设计解。本发明通过骨骼肌的仿生原理,使汽车车轮在紧急状况时具有更好的刚度和耐久性,并根据不同的

一种仿生非充气车轮.pdf
本发明提供了一种仿生非充气车轮,涉及轮胎技术领域,由仿生非充气轮胎和仿生轮毂两大部分组成。所述仿生非充气轮胎沿径向由外到内依次包括胎冠、V形缓冲体、仿生支撑总承和轮辋固定套四部分;所述仿生轮毂包括轮辋和仿生轮辐两部分。本发明所述仿生支撑总承采用环保型高模量热塑性聚氨酯材料浇注成型,所述仿生轮辐以铝镁合金为材料,采用真空高压铸造工艺制成;所述仿生支撑总承和仿生轮辐采用蜘蛛网状结构设计,充分利用仿生学机理的同时进一步发挥材料的优越性能,轮胎承载能力与强度得到提升,减震效果也得到极大改善,汽车行驶的安全性与舒适

基于负泊松比结构的超轻重量非充气轮胎结构.pdf
根据本发明的非充气轮胎,它包括一个旋转中心轴;一组绕中心轴旋转的由负泊松比单元晶胞构成的同心环状物,每个负泊松比单元晶胞由一组构成负泊松比结构的构件组成。最外圈的单元晶胞可以以一种有利于与路面接触的方式排列,并可以有适当的覆盖材料。当轮子旋转时,随着接触路面区域所受外力的增加,负泊松比结构的强度和刚度会增加。同心环状物中间可以放置夹层材料或填充材料,例子中的单元晶胞由一组嵌套的V形结构构成。最外圈单元晶胞外面有一层适于和地面相接触的覆盖材料,构成完整的轮胎或轮子。轮胎或轮子可以是充气的,也可以是非充气的。

一种仿生负泊松比材料及其制备方法.pdf
本发明属于功能高分子泡沫材料,涉及材料的胞体结构和排列方式以及力学性能,特别涉及仿生负泊松比材料及其制备方法。本发明是基于天然泡沫的微孔结构及产生负泊松比的原理,设计和制备了一种具有特殊负泊松比结构的仿生负泊松比材料。本发明的仿生负泊松比材料是由热塑性塑料通过螺杆挤出机制备得到的一种多孔泡沫结构材料,所述的孔是拉长的蜂窝状微孔,且众多的所述的拉长的蜂窝状微孔的长轴沿径向方向一层一层的由中心轴对称向外呈发散状排列。本发明的材料在遭遇冲击时,因负泊松比引起的双向收缩,使冲击力迅速转化为形变能而被吸收,同时密度
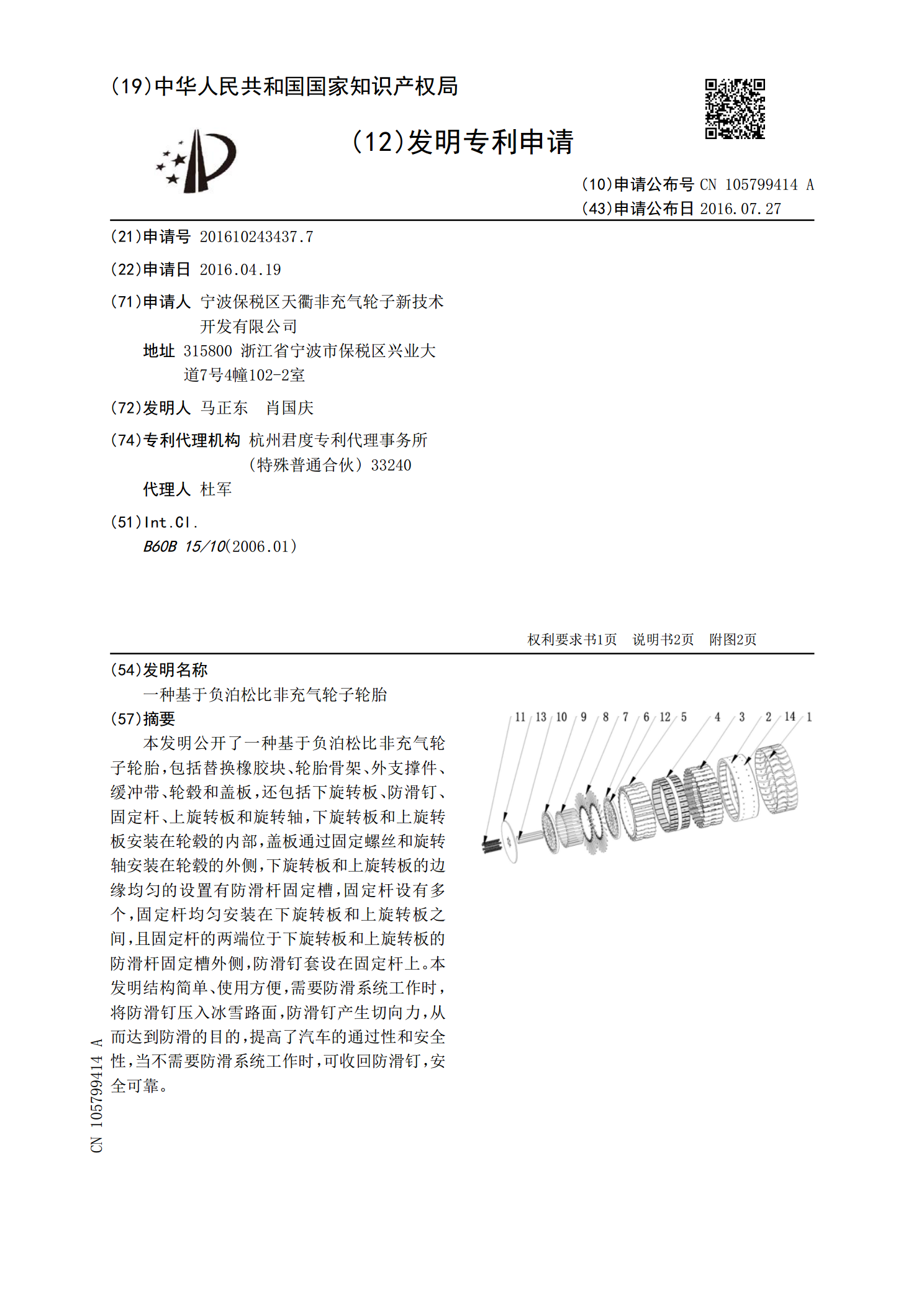
一种基于负泊松比非充气轮子轮胎.pdf
本发明公开了一种基于负泊松比非充气轮子轮胎,包括替换橡胶块、轮胎骨架、外支撑件、缓冲带、轮毂和盖板,还包括下旋转板、防滑钉、固定杆、上旋转板和旋转轴,下旋转板和上旋转板安装在轮毂的内部,盖板通过固定螺丝和旋转轴安装在轮毂的外侧,下旋转板和上旋转板的边缘均匀的设置有防滑杆固定槽,固定杆设有多个,固定杆均匀安装在下旋转板和上旋转板之间,且固定杆的两端位于下旋转板和上旋转板的防滑杆固定槽外侧,防滑钉套设在固定杆上。本发明结构简单、使用方便,需要防滑系统工作时,将防滑钉压入冰雪路面,防滑钉产生切向力,从而达到防滑