
四轴串联超大管切割机器人.pdf

一条****贺6


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四轴串联超大管切割机器人.pdf
本发明公开了一种四轴串联超大管切割机器人,包括枪摆机构、半径臂机构、伸缩臂机构、升降臂机构,其特征在于:所述枪摆机构位于半径臂机构上侧且靠近工件一侧,割枪可以在水平方向摆动一定角度;所述半径臂机构通过螺栓与枪摆机构固连,其轨道轴线与工件轴线相垂直,通过其运动可以控制割枪远离或靠近工件;所述伸缩臂机构通过螺栓与半径臂机构固连且位于远离枪摆机构一侧,其轨道轴线与工件轴线相平行;所述升降臂机构通过螺栓与伸缩臂机构固连,其轨道轴线与工件轴线相垂直,其下方安装有滚轮,可以在地面移动。
六轴串联机器人机械参数的标定方法.pdf
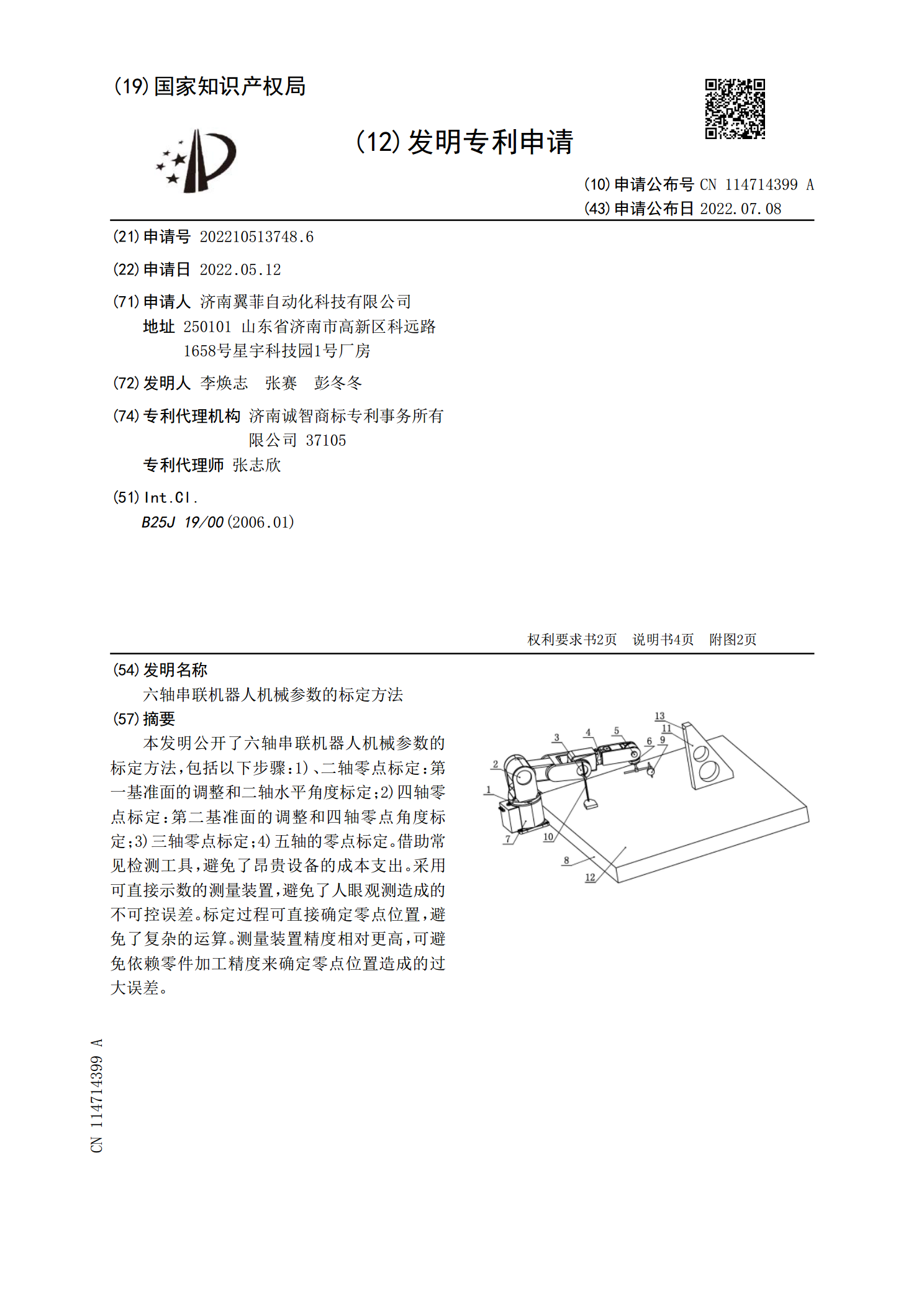
本发明公开了六轴串联机器人机械参数的标定方法,包括以下步骤:1)、二轴零点标定:第一基准面的调整和二轴水平角度标定;2)四轴零点标定:第二基准面的调整和四轴零点角度标定;3)三轴零点标定;4)五轴的零点标定。借助常见检测工具,避免了昂贵设备的成本支出。采用可直接示数的测量装置,避免了人眼观测造成的不可控误差。标定过程可直接确定零点位置,避免了复杂的运算。测量装置精度相对更高,可避免依赖零件加工精度来确定零点位置造成的过大误差。

用于五轴切割机的机器人滑动装置.pdf
本发明公开了一种用于五轴切割机的机器人滑动装置,机器人滑动装置包括竖支撑架、横滑板、滑动板、切割机构、细圆杆、粗圆柱和驱动装置;竖支撑架竖直设置,且横滑板固接在竖支撑架上,横滑板所在长度方向上的直线与竖直方向相垂直;横滑板沿长度方向上设置有多个方形凸起;滑动板活动连接于横滑板上,滑动板上还设置有T形凸条,T形凸条竖直设置且T形凸条沿滑动板的顶端延伸至底端;粗圆柱的底端还可拆卸地连接有钻杆,钻杆朝向待钻物;粗圆柱设置在开口的内部;驱动装置的驱动轴可拆卸地连接在细圆杆上。该机器人滑动装置能够在多个方向切割行李

机器人柔性激光切割替代五轴机床,绝对行!.docx
机器人柔性激光切割替代五轴机床,绝对行!机器人柔性激光切割替代五轴机床,绝对行!机器人柔性激光切割在汽车行业的应用正变得日益普遍,这与激光技术的发展和机器人精密轨迹控制技术的完善有着密不可分的联系。机器人柔性激光切割的方式多种多样,既可以做成单机器人切割平台,又可以组合成柔性加工生产线。涉及的工件主要是两种不同类型的零部件:一种是金属件通过挤压或者拉延形成的3D车体结构件和覆盖件,包括热成型件等;另外一种是管状金属结构件,包括排气管、交叉梁等。覆盖件传统的生产方式是通过开模具冲压,然后再进行冲孔模和切边模

机器人柔性激光切割替代五轴机床,绝对行!.docx
机器人柔性激光切割替代五轴机床,绝对行!机器人柔性激光切割替代五轴机床,绝对行!机器人柔性激光切割在汽车行业的应用正变得日益普遍,这与激光技术的发展和机器人精密轨迹控制技术的完善有着密不可分的联系。机器人柔性激光切割的方式多种多样,既可以做成单机器人切割平台,又可以组合成柔性加工生产线。涉及的工件主要是两种不同类型的零部件:一种是金属件通过挤压或者拉延形成的3D车体结构件和覆盖件,包括热成型件等;另外一种是管状金属结构件,包括排气管、交叉梁等。覆盖件传统的生产方式是通过开模具冲压,然后再进行冲孔模和切边模