
六轴串联机器人机械参数的标定方法.pdf

小新****ou


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
六轴串联机器人机械参数的标定方法.pdf
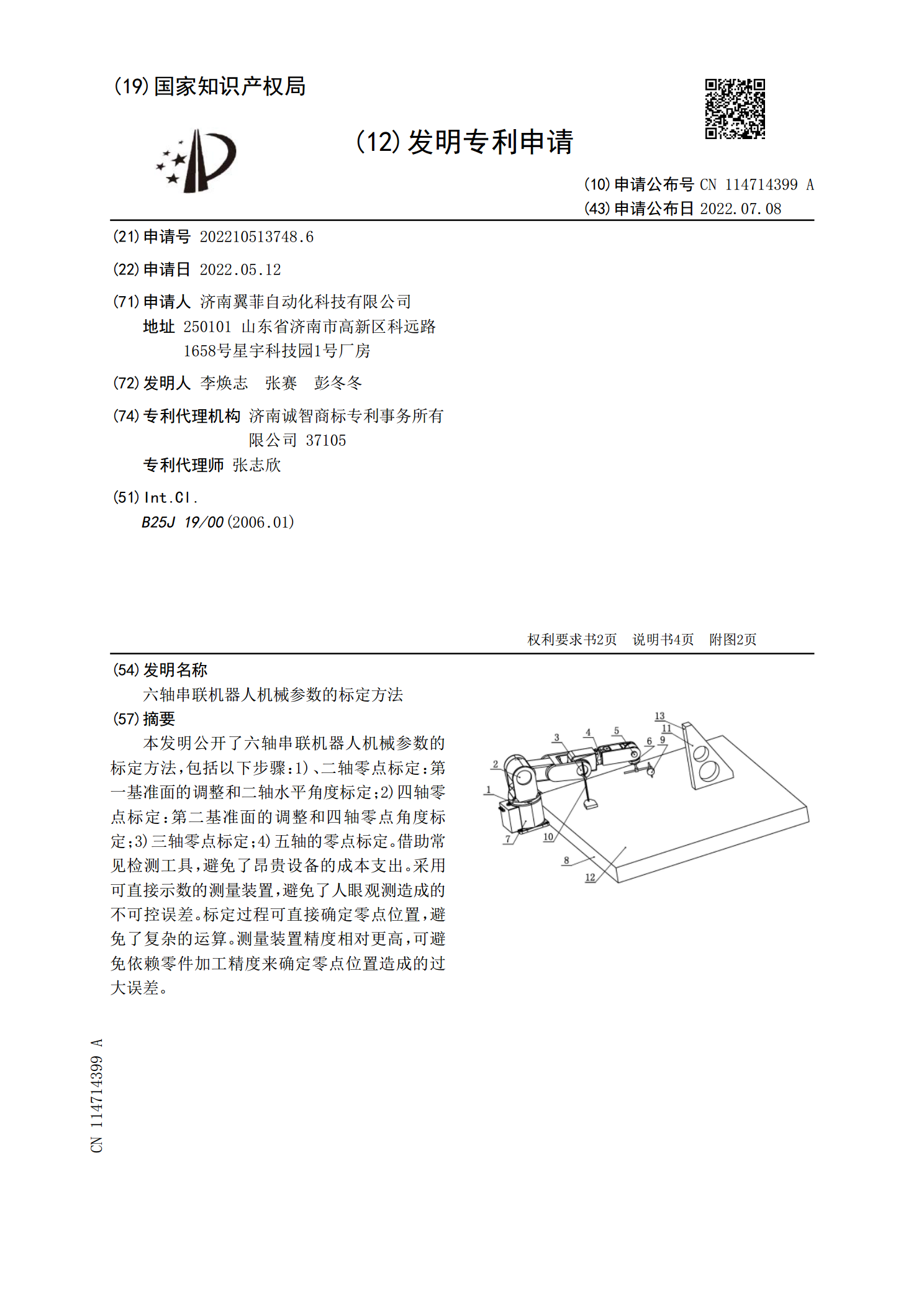
本发明公开了六轴串联机器人机械参数的标定方法,包括以下步骤:1)、二轴零点标定:第一基准面的调整和二轴水平角度标定;2)四轴零点标定:第二基准面的调整和四轴零点角度标定;3)三轴零点标定;4)五轴的零点标定。借助常见检测工具,避免了昂贵设备的成本支出。采用可直接示数的测量装置,避免了人眼观测造成的不可控误差。标定过程可直接确定零点位置,避免了复杂的运算。测量装置精度相对更高,可避免依赖零件加工精度来确定零点位置造成的过大误差。

六轴工业机器人的参数辨识方法.docx
六轴工业机器人的参数辨识方法参数辨识是指通过实验和数据分析,从系统的输入与输出之间建立模型并确定系统参数的过程。在六轴工业机器人中,参数辨识是非常重要的一步,它关乎到机器人在不同工况下的运动控制精度和稳定性。本文将介绍六轴工业机器人参数辨识的方法和步骤,并结合实例进行详细说明。六轴工业机器人是一种具有六个自由度的机器人系统,它由六个关节和一个末端执行器组成,能够模拟人体的手臂运动。在工业生产中,六轴工业机器人常常用于自动化操作,例如焊接、喷涂、装配等。为了实现高精度和高性能的运动控制,需要准确地确定机器人
一种scara机器人机械参数的标定方法.pdf
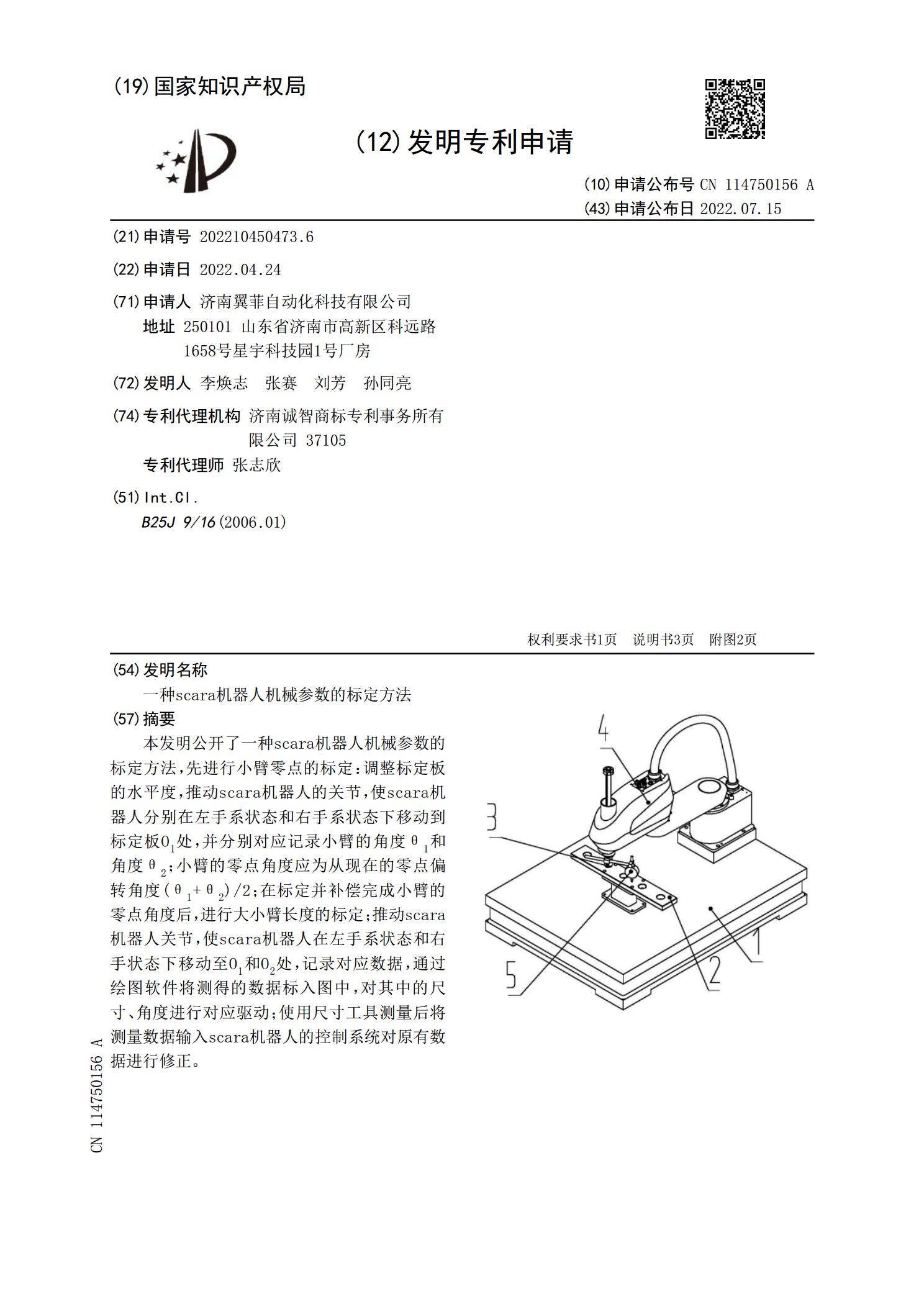
本发明公开了一种scara机器人机械参数的标定方法,先进行小臂零点的标定:调整标定板的水平度,推动scara机器人的关节,使scara机器人分别在左手系状态和右手系状态下移动到标定板O<base:Sub>1</base:Sub>处,并分别对应记录小臂的角度θ<base:Sub>1</base:Sub>和角度θ<base:Sub>2</base:Sub>;小臂的零点角度应为从现在的零点偏转角度(θ<base:Sub>1</base:Sub>+θ<base:Sub>2</base:Sub>)/2;在标定并补偿

基于PMPSD的工业机器人几何参数标定方法.docx
基于PMPSD的工业机器人几何参数标定方法基于PMPSD的工业机器人几何参数标定方法摘要:工业机器人的准确性和效率对于自动化生产过程至关重要。机器人的准确性受到其几何参数的影响,而几何参数标定是提高机器人精度的关键。现有的标定方法通常基于精确的测量设备,但这些设备费用高昂且使用复杂。本论文提出了一种基于PMPSD(平均定位最小二乘方法)的工业机器人几何参数标定方法,该方法通过最小化偏差求解机器人几何参数,不仅准确性高且成本低廉。1引言工业机器人在现代制造中起着至关重要的作用,其精确性和效率直接影响到生产线

机器人运动学参数递推标定方法.docx
机器人运动学参数递推标定方法标题:机器人运动学参数递推标定方法摘要:机器人运动学参数的准确标定对于精确控制和路径规划具有重要意义。本论文提出了一种机器人运动学参数递推标定方法,通过运动学模型和标定算法的结合,实现了机器人运动学参数的自动标定和递推。该方法通过对机器人执行一系列已知运动,结合传感器数据和数学优化算法,准确估计出机器人的运动学参数。该方法具有高精度、高效率、自动化程度高等优点,适用于各类机器人系统的运动学参数标定。关键词:机器人、运动学参数、递推标定、传感器数据、数学优化算法1.引言机器人的运