
一种预防汽轮机主汽阀全行程活动试验功率振荡的方法.pdf

是你****芹呀

1/7

2/7

3/7
4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种预防汽轮机主汽阀全行程活动试验功率振荡的方法.pdf
本发明公开了一种能够预防汽轮发电汽轮机进行主汽阀全行程活动试验过程中发生功率振荡的方法,在现有技术的基础上,增加了判断模块a和报警装置,实现了对功率控制回路的切除,有效防止机组产生功率波动及功率振荡,同时在汽轮机组负荷偏差大后能发出声光报警;增加负荷偏差函数,实现了汽轮机主汽阀全行程活动试验过程中变速率开、关高压调节阀,减小汽轮机负荷的波动幅度;增加判断模块b和阀位手动输入模块,实现机组阀位保持功能及人工输入阀位值功能,有效防止机组产生功率波动及功率振荡;为汽轮机组主汽阀全行程活动试验的正常、顺利进行提供
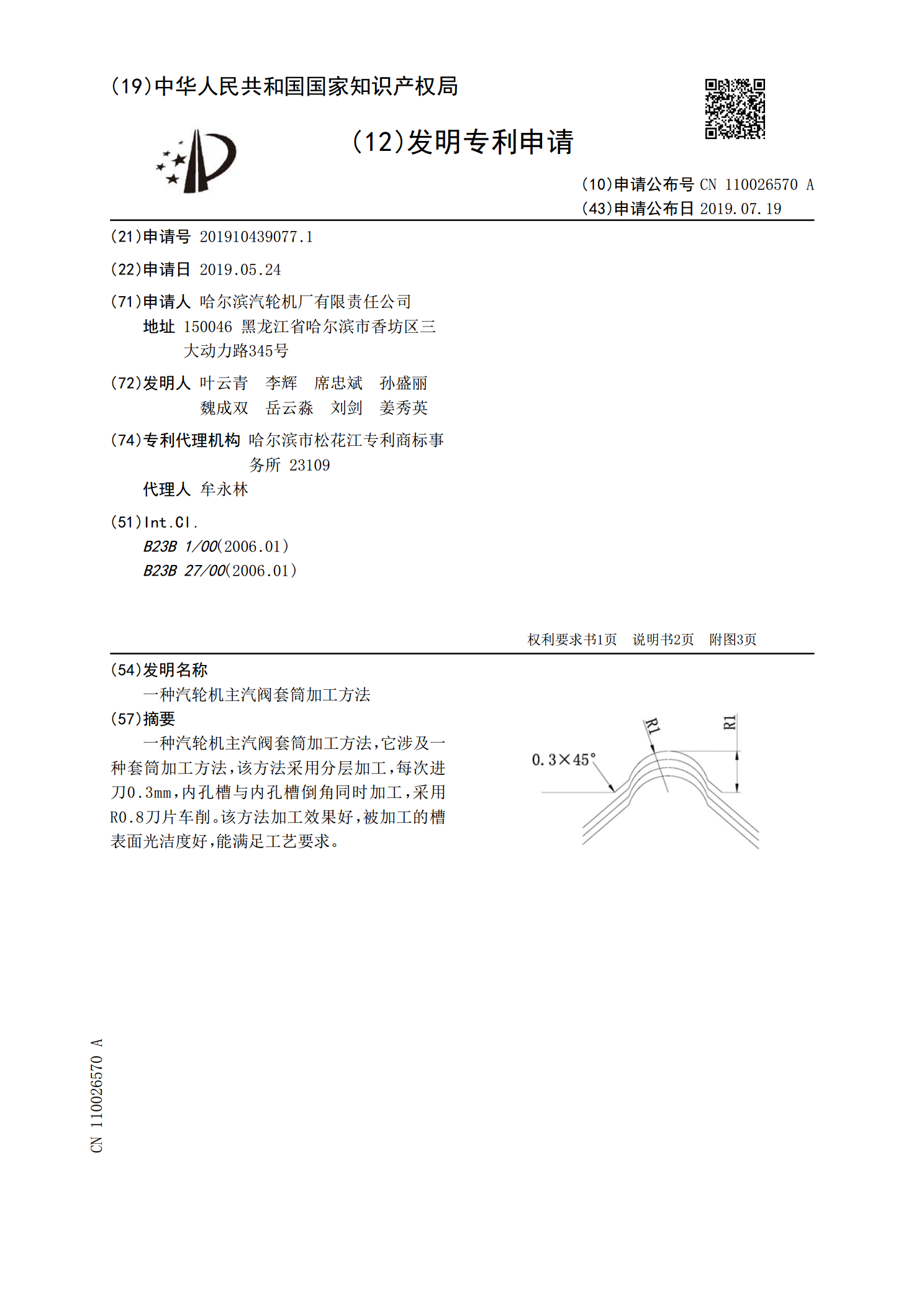
一种汽轮机主汽阀套筒加工方法.pdf
一种汽轮机主汽阀套筒加工方法,它涉及一种套筒加工方法,该方法采用分层加工,每次进刀0.3mm,内孔槽与内孔槽倒角同时加工,采用R0.8刀片车削。该方法加工效果好,被加工的槽表面光洁度好,能满足工艺要求。

一种核电厂汽轮机主汽阀防汽锤设计方法.pdf
本发明涉及一种核电厂汽轮机主汽阀防汽锤设计方法,该汽轮机具有四个主汽阀,四个主汽阀和主蒸汽联箱之间分别连接有四条主蒸汽管道,该方法包括如下步骤:S1.建立主蒸汽管道布置模型;S2.进行一次应力和二次应力计算的主蒸汽管道布置计算;S3.计算汽轮机汽锤工况响应谱,获得恶劣工况的响应谱;S4.将最恶劣工况的响应谱作为设计输入,在主蒸汽管道应力最大点设置管道阻尼器,进行动态模拟计算,结果满足设计要求,则进行步骤S6,不满足则进行步骤S5;S5.调整管道阻尼器的刚度,再次进行动态模拟计算,如果满足设计要求,则进行步

核电汽轮机主汽阀调节阀动态分析.docx
核电汽轮机主汽阀调节阀动态分析标题:核电汽轮机主汽阀调节阀动态分析摘要:核电汽轮机作为一种重要的能源转换设备,在能源行业中具有重要地位。主汽阀与调节阀是核电汽轮机中的关键部件,其性能直接影响着汽轮机的运行效率和安全稳定性。本论文旨在对核电汽轮机主汽阀调节阀进行动态分析,以揭示其在汽轮机运行中的作用和性能特点。通过对主汽阀调节阀的结构特点、工作原理、动态特性进行分析和讨论,为核电汽轮机的优化设计、故障诊断和性能改进提供理论依据。关键词:核电汽轮机;主汽阀;调节阀;动态分析一、引言核电汽轮机是将核能转化为机械
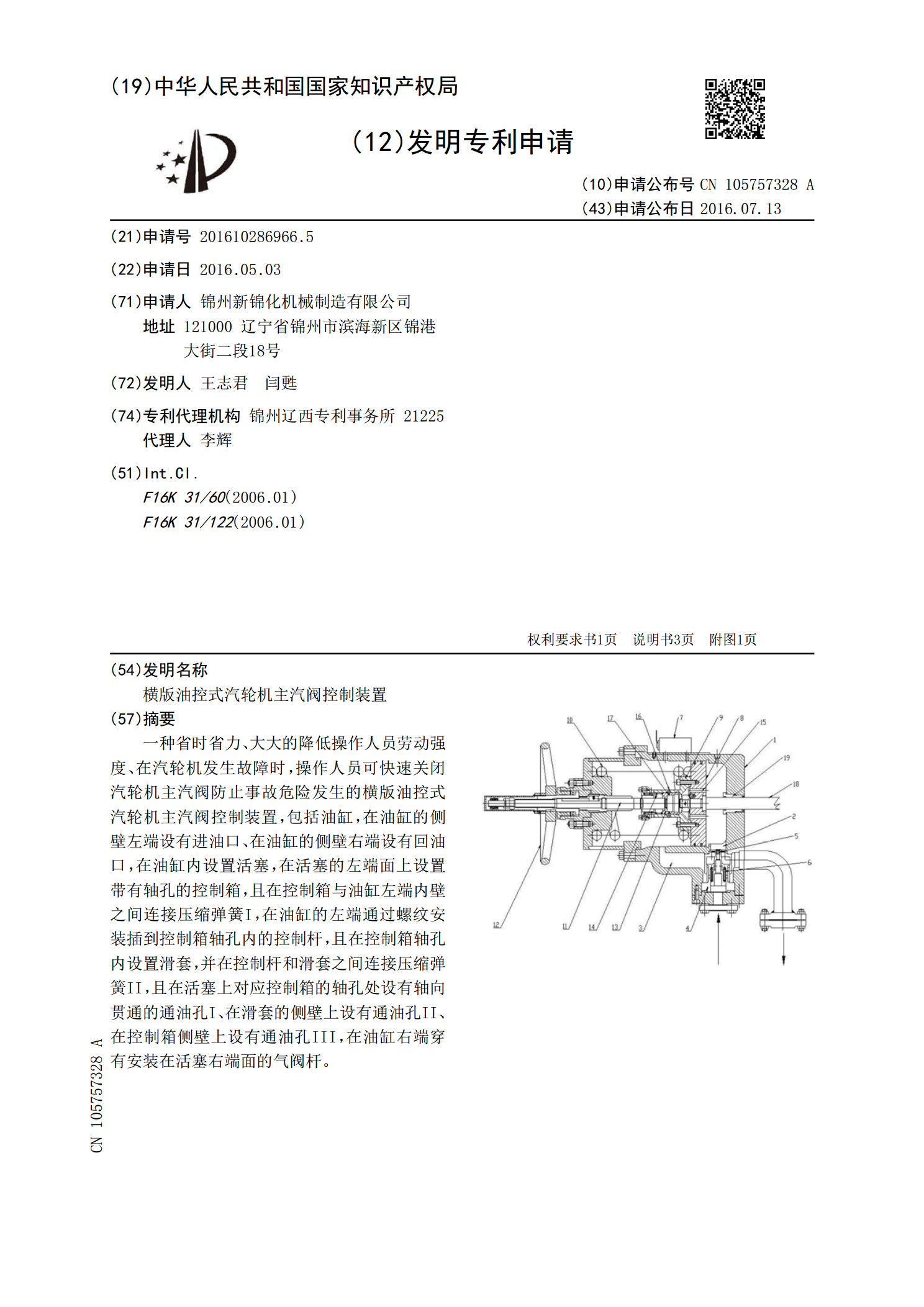
横版油控式汽轮机主汽阀控制装置.pdf
一种省时省力、大大的降低操作人员劳动强度、在汽轮机发生故障时,操作人员可快速关闭汽轮机主汽阀防止事故危险发生的横版油控式汽轮机主汽阀控制装置,包括油缸,在油缸的侧壁左端设有进油口、在油缸的侧壁右端设有回油口,在油缸内设置活塞,在活塞的左端面上设置带有轴孔的控制箱,且在控制箱与油缸左端内壁之间连接压缩弹簧I,在油缸的左端通过螺纹安装插到控制箱轴孔内的控制杆,且在控制箱轴孔内设置滑套,并在控制杆和滑套之间连接压缩弹簧II,且在活塞上对应控制箱的轴孔处设有轴向贯通的通油孔I、在滑套的侧壁上设有通油孔II、在控制