
一种融合主动前轮转向的EPS转向盘突变力矩修正方法.pdf

一吃****海逸


1/8

2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种融合主动前轮转向的EPS转向盘突变力矩修正方法.pdf
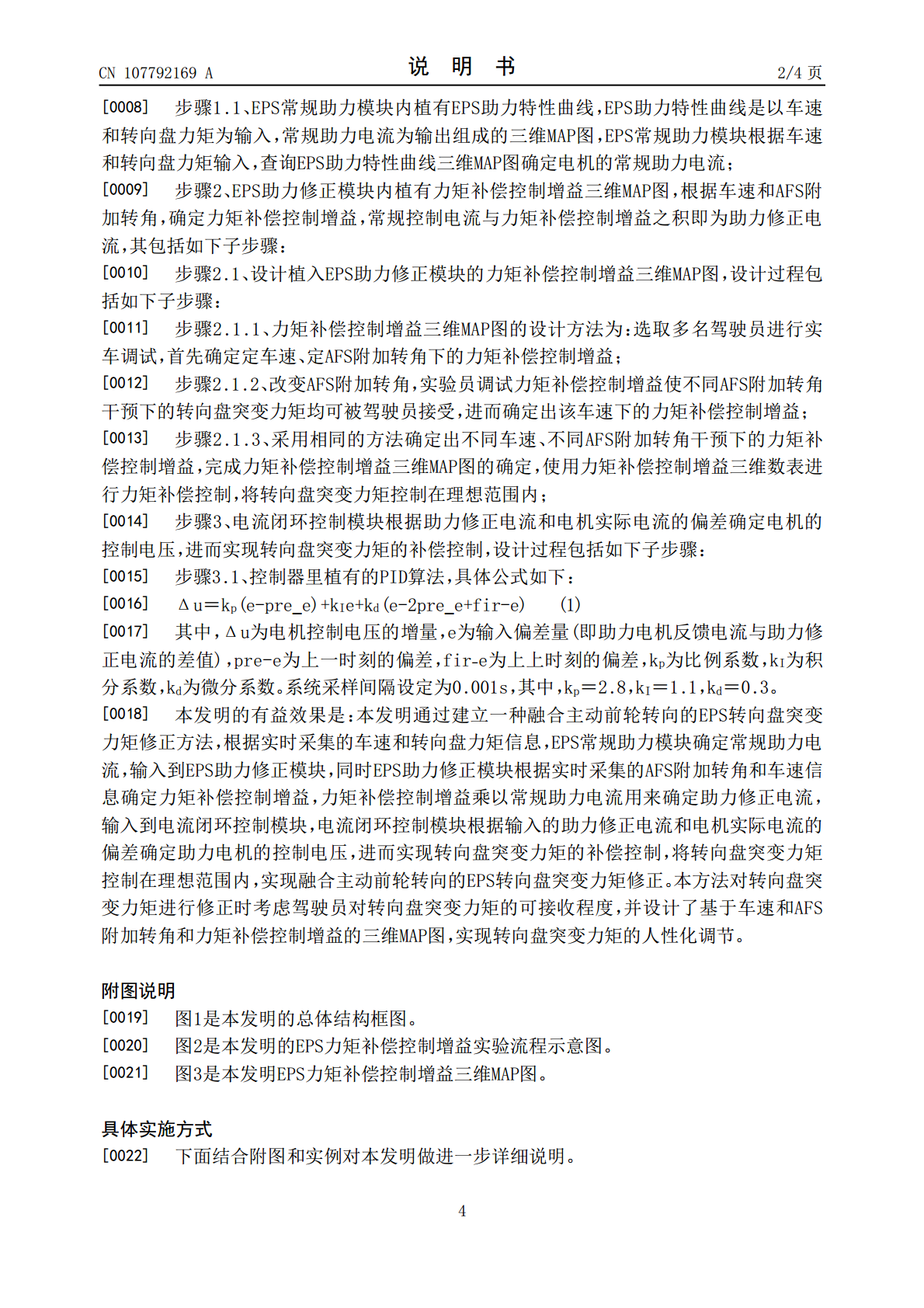
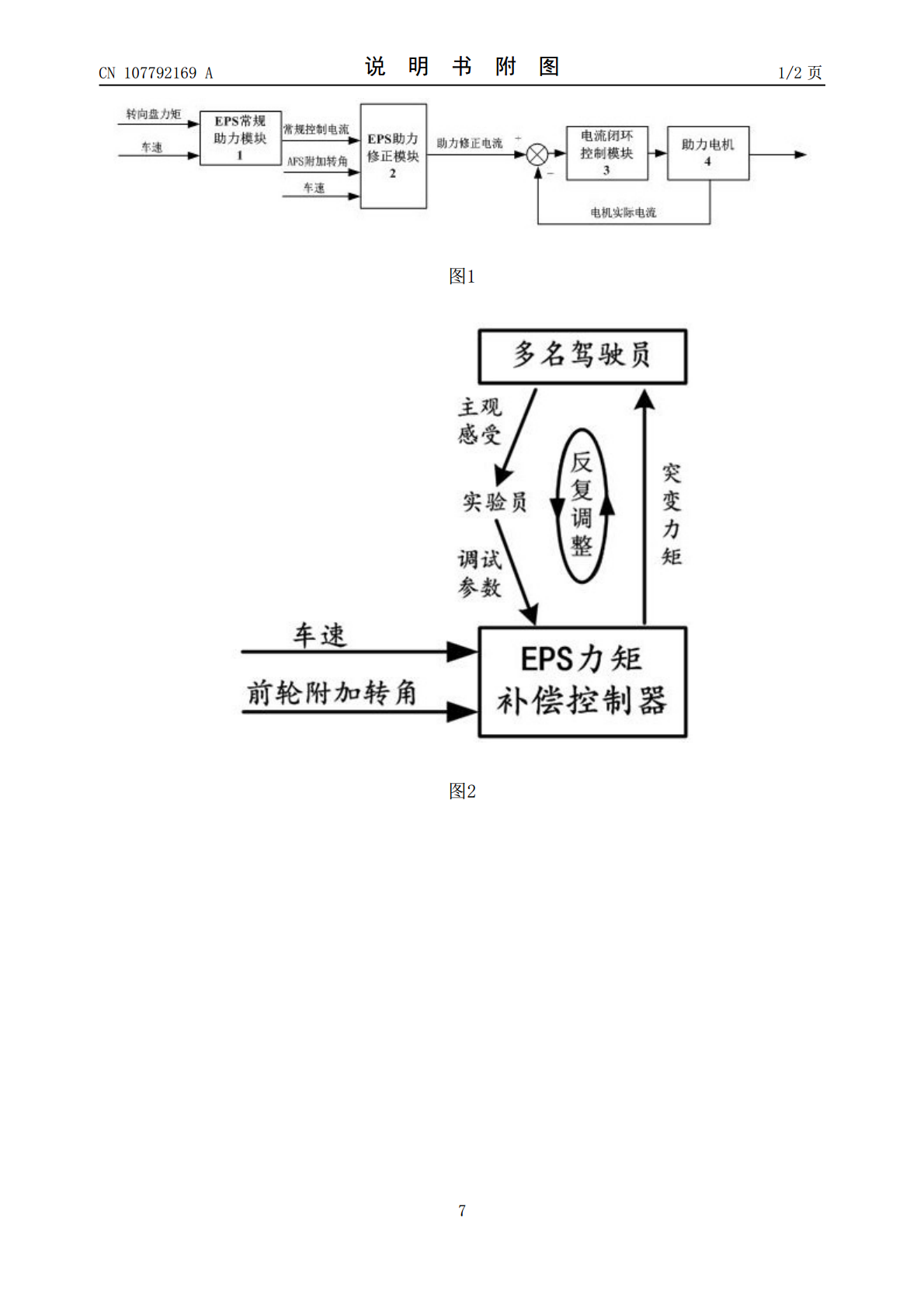
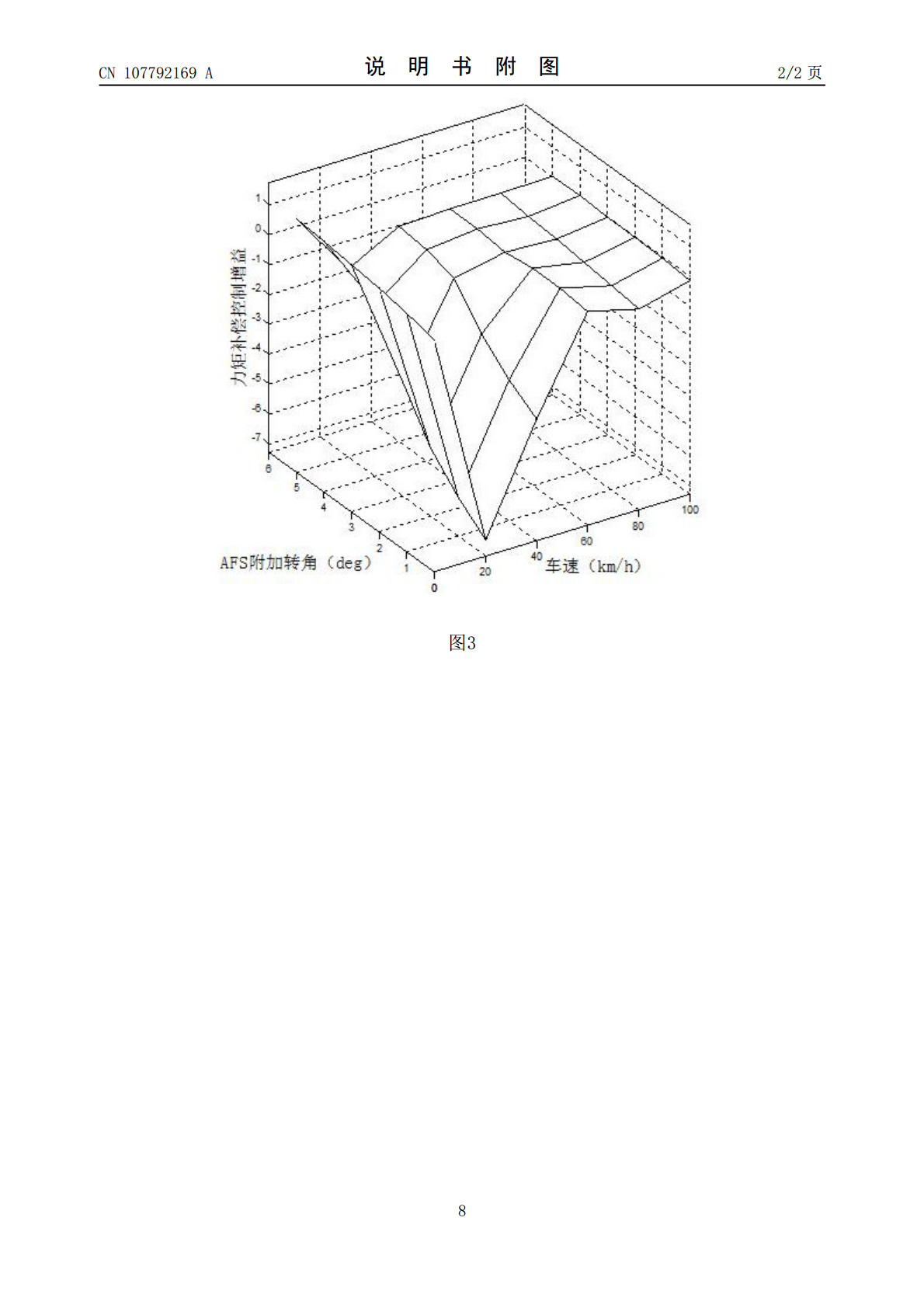
本发明涉及一种融合主动前轮转向的EPS转向盘突变力矩修正方法,其特征在于,该方法是通过EPS常规助力模块根据实时采集的车速、转向盘力矩信息,确定常规助力电流,输入到EPS助力修正模块,同时通过EPS助力修正模块根据实时采集的AFS附加转角和车速信息确定力矩补偿控制增益,力矩补偿控制增益乘以常规助力电流用来确定助力修正电流,输入到电流闭环控制模块,电流闭环控制模块根据输入的助力修正电流和电机实际电流的偏差确定助力电机的控制电压,进而实现转向盘突变力矩的补偿控制,将转向盘突变力矩控制在理想范围内,实现融合主动

基于主动转向干预的EPS系统转向盘力矩突变修正策略.docx
基于主动转向干预的EPS系统转向盘力矩突变修正策略随着汽车技术的不断发展,电控转向系统越来越普遍,EPS(ElectricPowerSteering)系统作为其一种,不仅使驾驶更轻松舒适,同时也提高了行车的安全性。然而,在某些情况下,EPS系统也会面临一些问题。例如转向盘力矩突变问题,这种情况通常会出现在车辆行驶时,特别是在转向时。由于突变的力矩信息会影响到驾驶员的掌控能力,进而导致车辆失控。因此需要对此类问题进行研究和解决,以提高汽车行驶安全。该问题产生的主要原因是汽车跑过造成的路面不平坦,车轮压缩和显

一种融合主动转向、助力转向和直接横摆力矩控制功能的电动轮转向控制系统及其控制方法.pdf
本发明涉及一种融合主动转向、助力转向和直接横摆力矩控制功能的电动轮转向控制系统及其控制方法,涉及电动轮转向控制领域。解决了目前电动助力转向系统转动惯性大,而且现有电动轮汽车取消了差速器,轮胎磨损严重,导致电动轮汽车行驶稳定性降低的问题。该系统中,扭矩传感器设在转向盘及转向管柱与前轴转向器之间,转角电机通过减速机构与后轴转向器连接,ECU控制模块根据反馈的车速、转向盘力矩、转向盘转角、质心侧偏角和横摆角速度信息,经过分析处理后确定驾驶员的驾驶意图、理想转向手力和主动转向附加转角,进而控制前后电动轮实现主动转
汽车前轮主动转向系统的主动转向传动装置.pdf
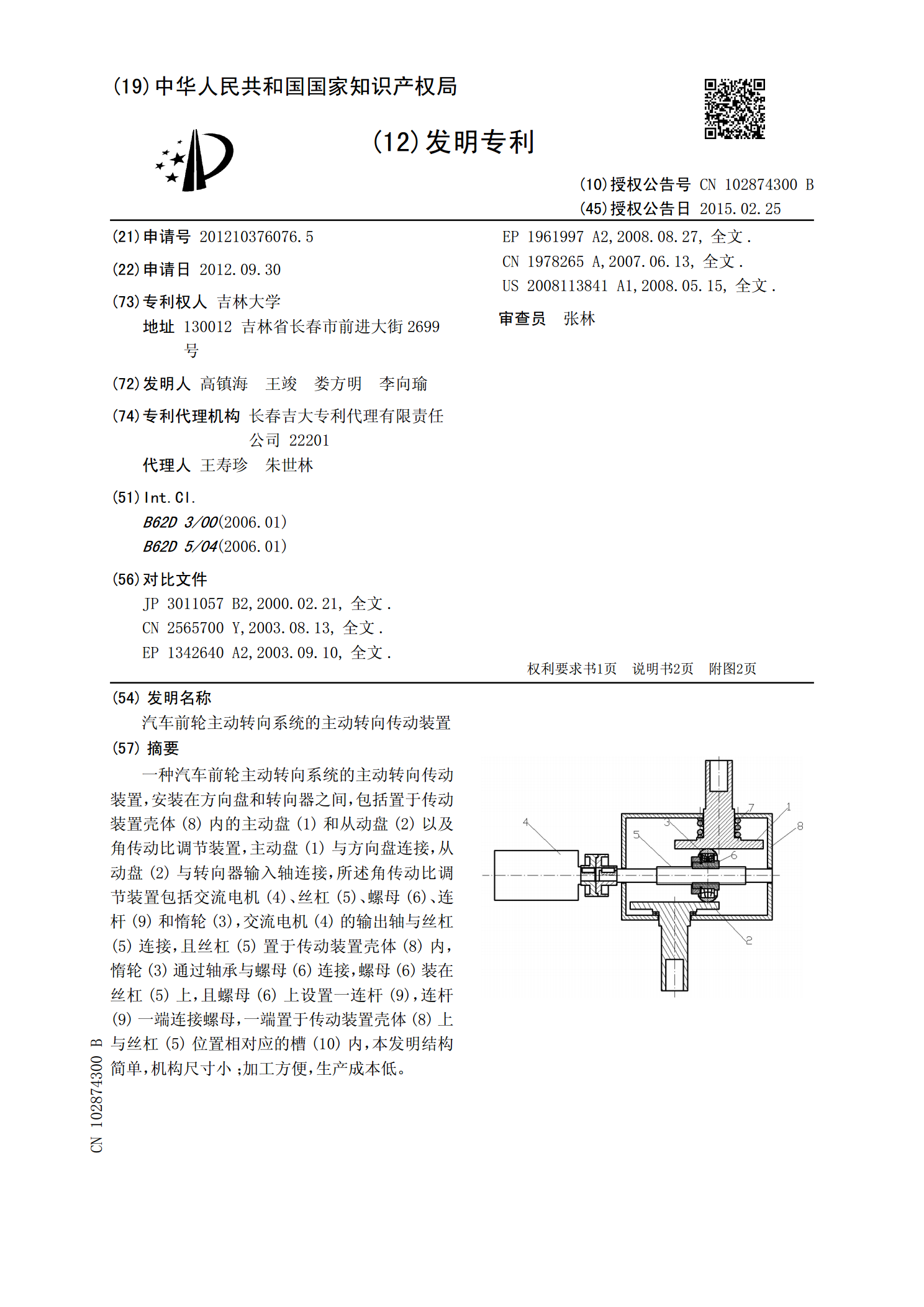
一种汽车前轮主动转向系统的主动转向传动装置,安装在方向盘和转向器之间,包括置于传动装置壳体(8)内的主动盘(1)和从动盘(2)以及角传动比调节装置,主动盘(1)与方向盘连接,从动盘(2)与转向器输入轴连接,所述角传动比调节装置包括交流电机(4)、丝杠(5)、螺母(6)、连杆(9)和惰轮(3),交流电机(4)的输出轴与丝杠(5)连接,且丝杠(5)置于传动装置壳体(8)内,惰轮(3)通过轴承与螺母(6)连接,螺母(6)装在丝杠(5)上,且螺母(6)上设置一连杆(9),连杆(9)一端连接螺母,一端置于传动装置壳
主动前轮转向和直接横摆力矩联合的汽车稳定性控制方法.pdf
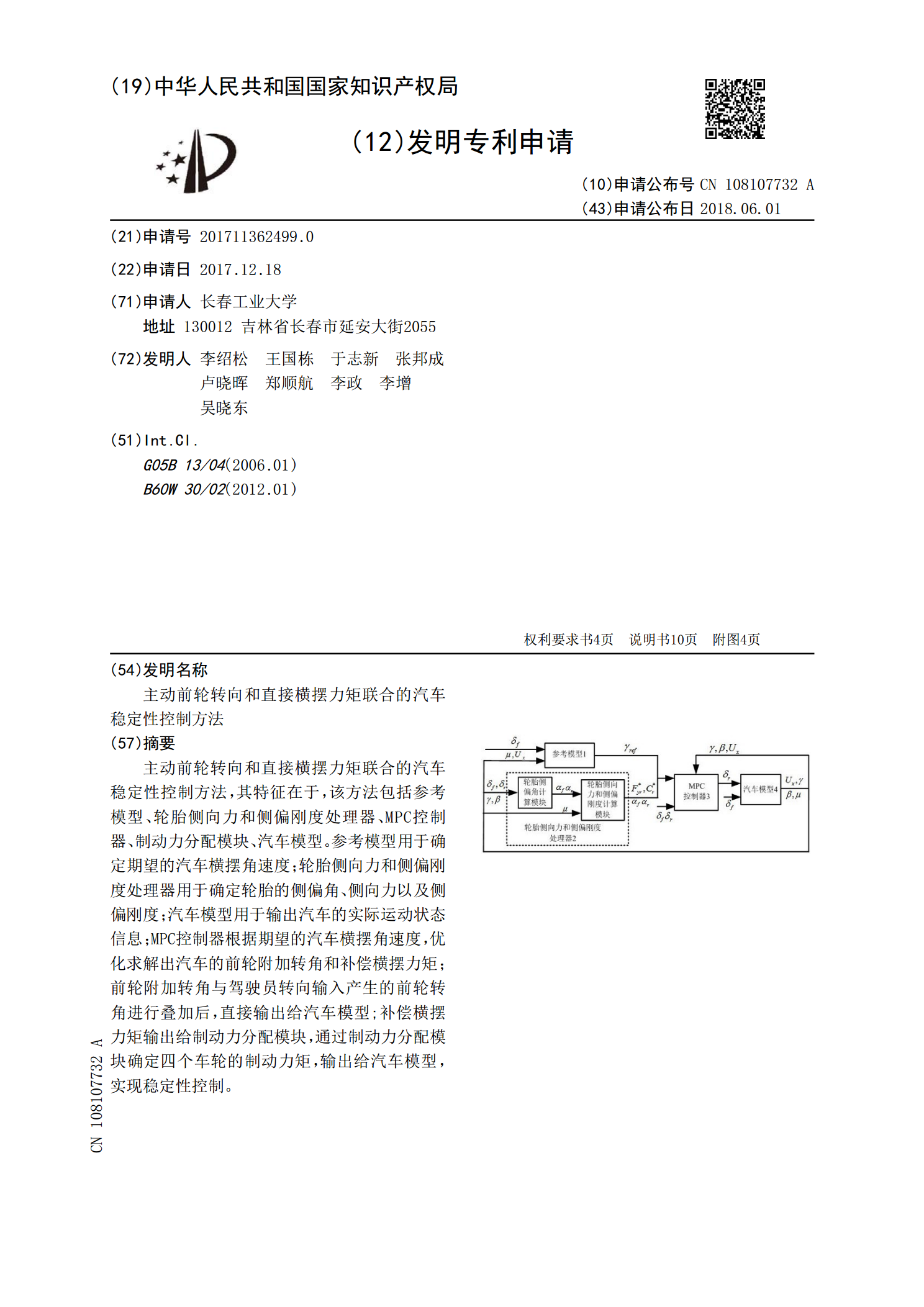
主动前轮转向和直接横摆力矩联合的汽车稳定性控制方法,其特征在于,该方法包括参考模型、轮胎侧向力和侧偏刚度处理器、MPC控制器、制动力分配模块、汽车模型。参考模型用于确定期望的汽车横摆角速度;轮胎侧向力和侧偏刚度处理器用于确定轮胎的侧偏角、侧向力以及侧偏刚度;汽车模型用于输出汽车的实际运动状态信息;MPC控制器根据期望的汽车横摆角速度,优化求解出汽车的前轮附加转角和补偿横摆力矩;前轮附加转角与驾驶员转向输入产生的前轮转角进行叠加后,直接输出给汽车模型;补偿横摆力矩输出给制动力分配模块,通过制动力分配模块确定