
一种多轮式机器人自适应协同控制算法及控制系统.pdf

佳晨****ng


1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多轮式机器人自适应协同控制算法及控制系统.pdf
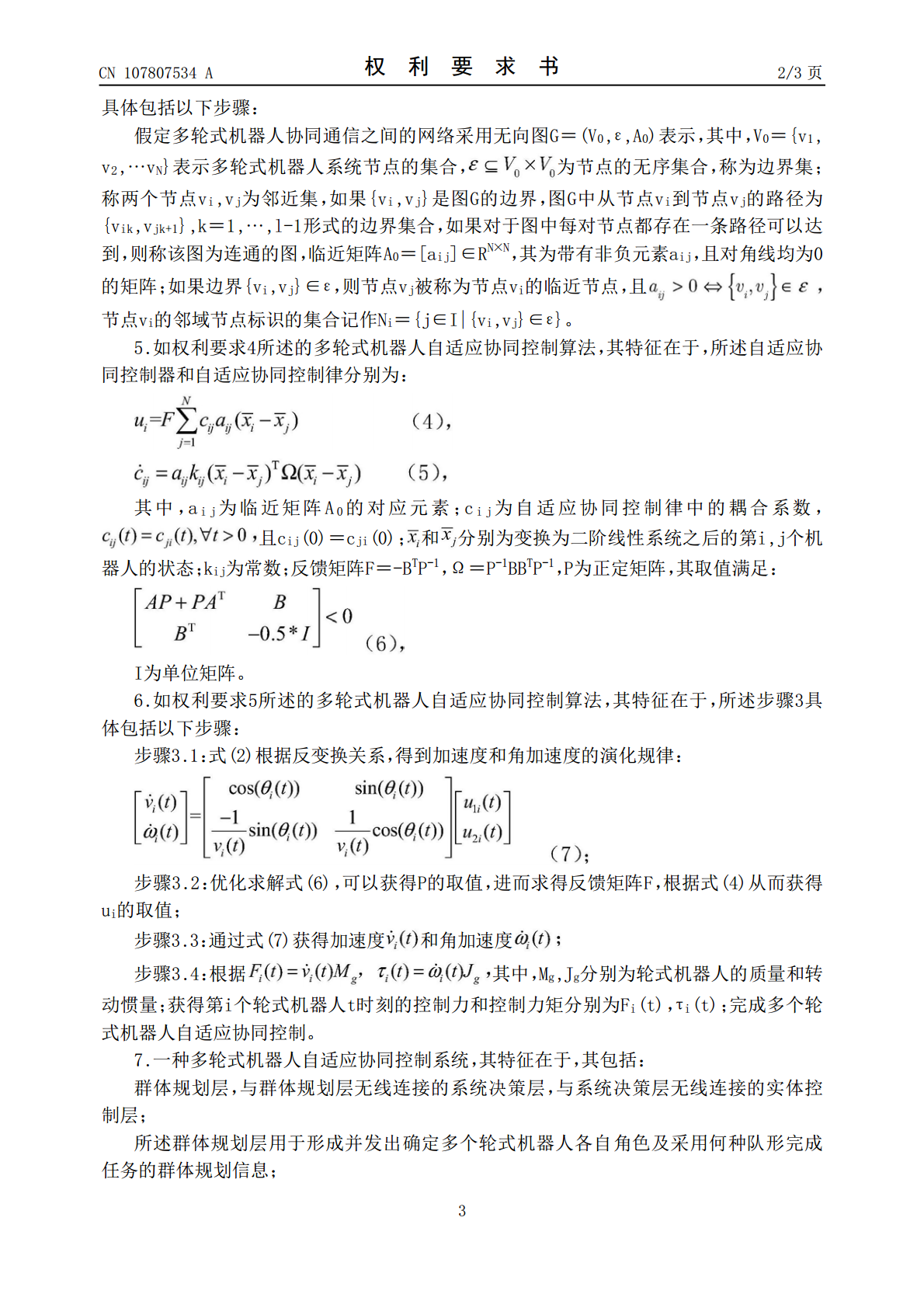
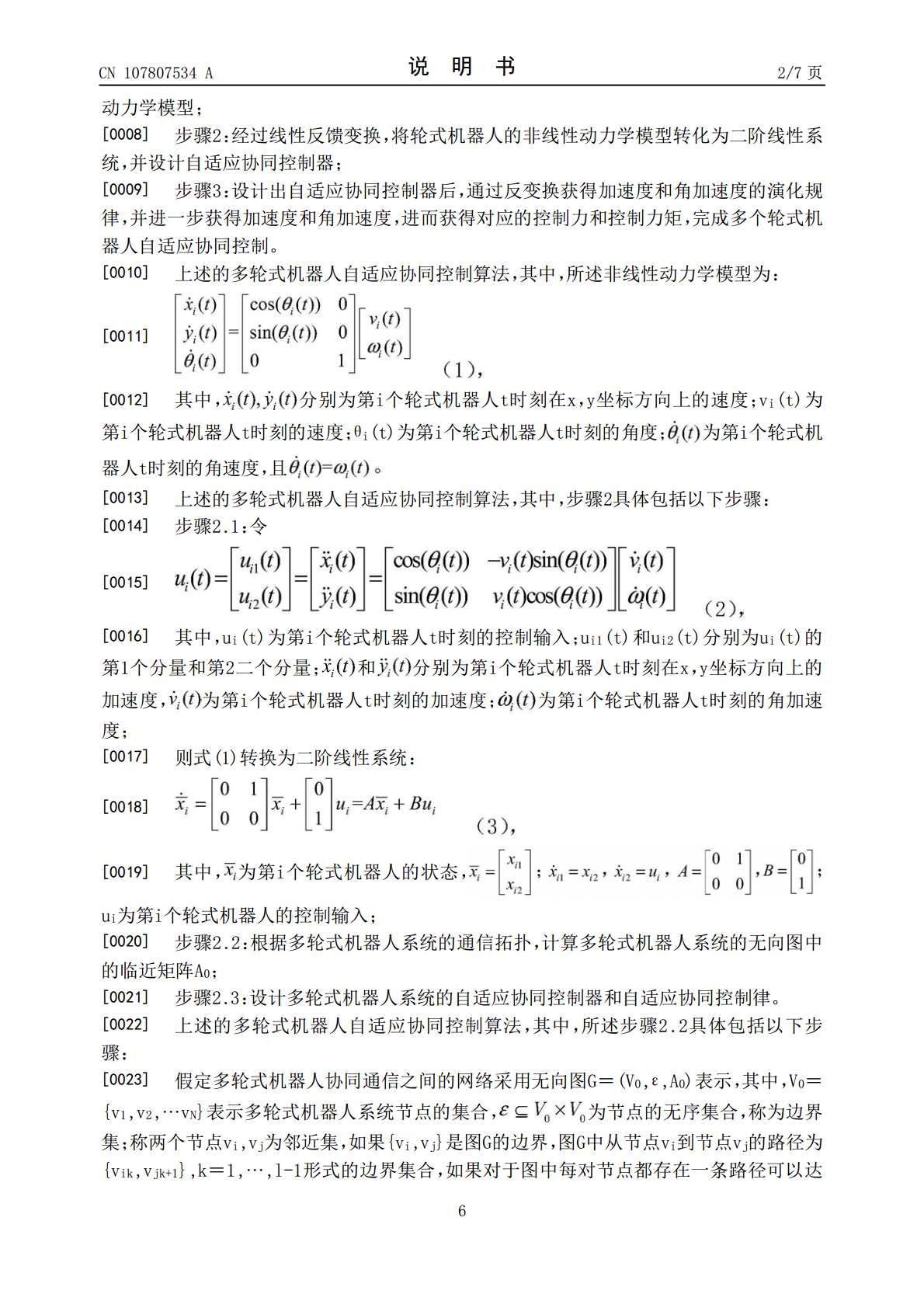
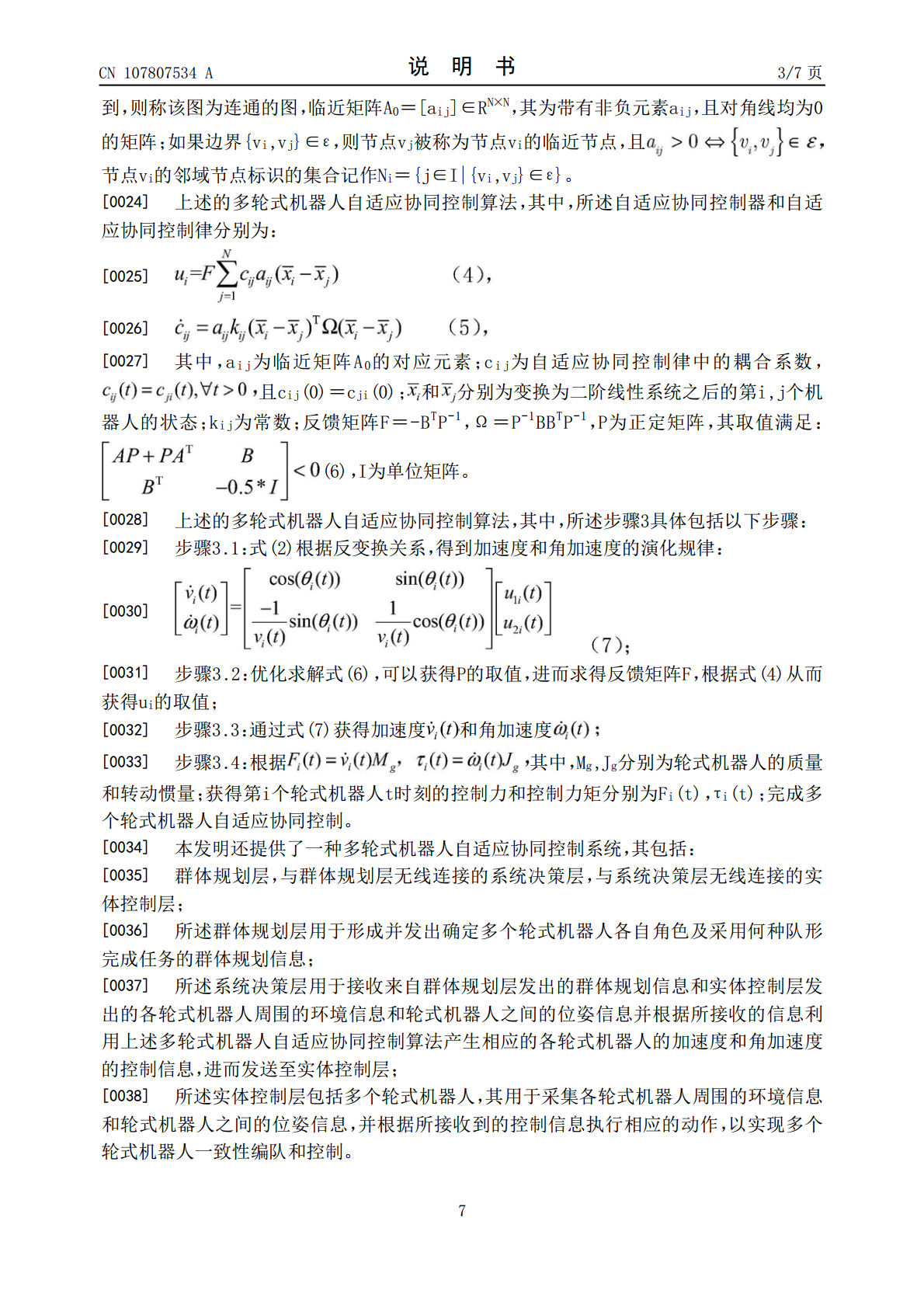
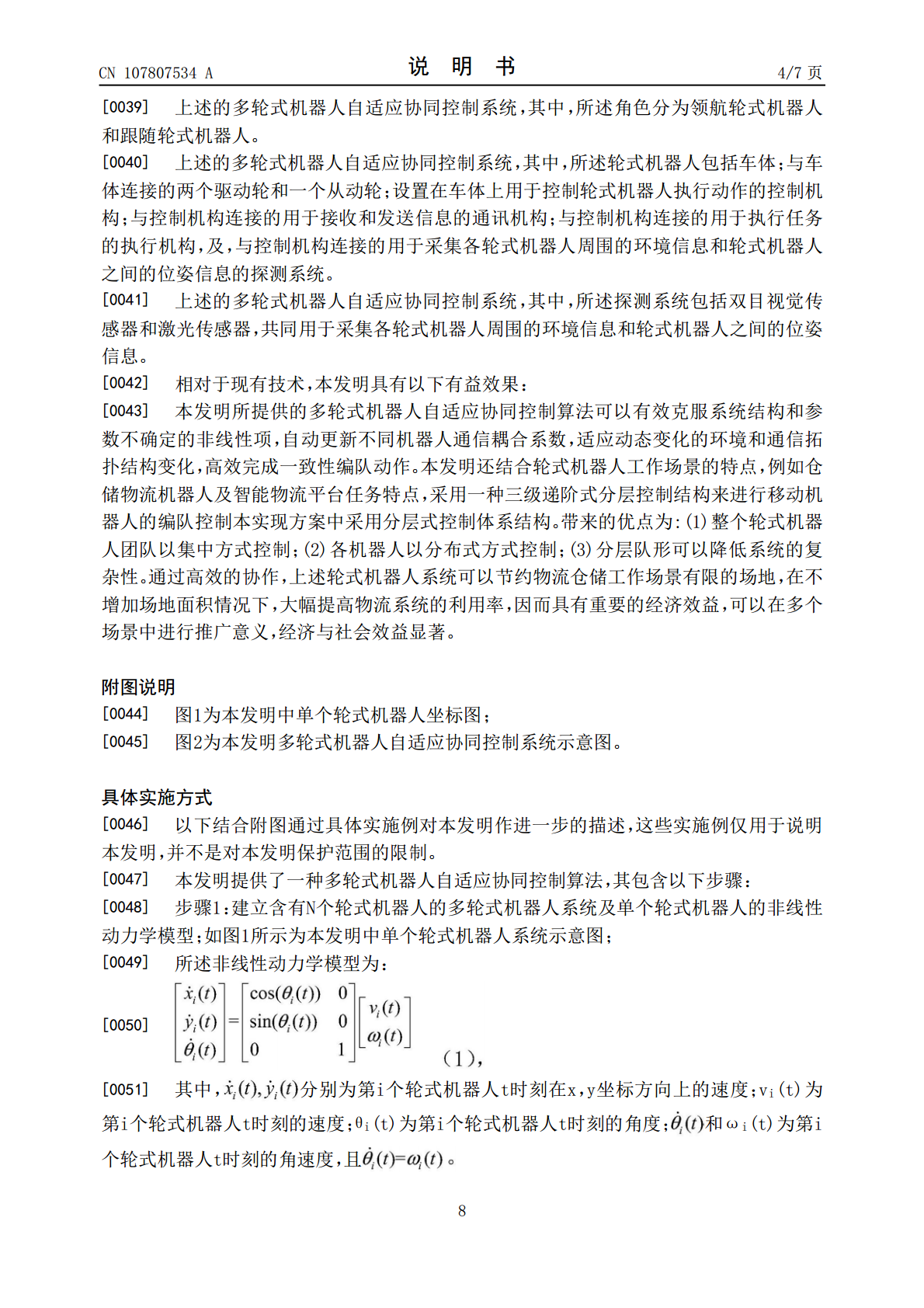
本发明公开了一种多轮式机器人自适应协同控制算法及控制系统,该控制算法包含以下步骤:步骤1:建立含有N个轮式机器人的多轮式机器人系统及单个轮式机器人的非线性动力学模型;步骤2:经过线性反馈变换,将轮式机器人的非线性动力学模型转化为二阶线性系统,并设计自适应协同控制器;步骤3:设计出自适应协同控制器后,通过反变换获得加速度和角加速度的演化规律,并进一步获得加速度和角加速度,进而获得对应的控制力和控制力矩,完成多个轮式机器人自适应协同控制。本发明可以有效克服系统结构和参数不确定的非线性项,自动更新不同机器人通信
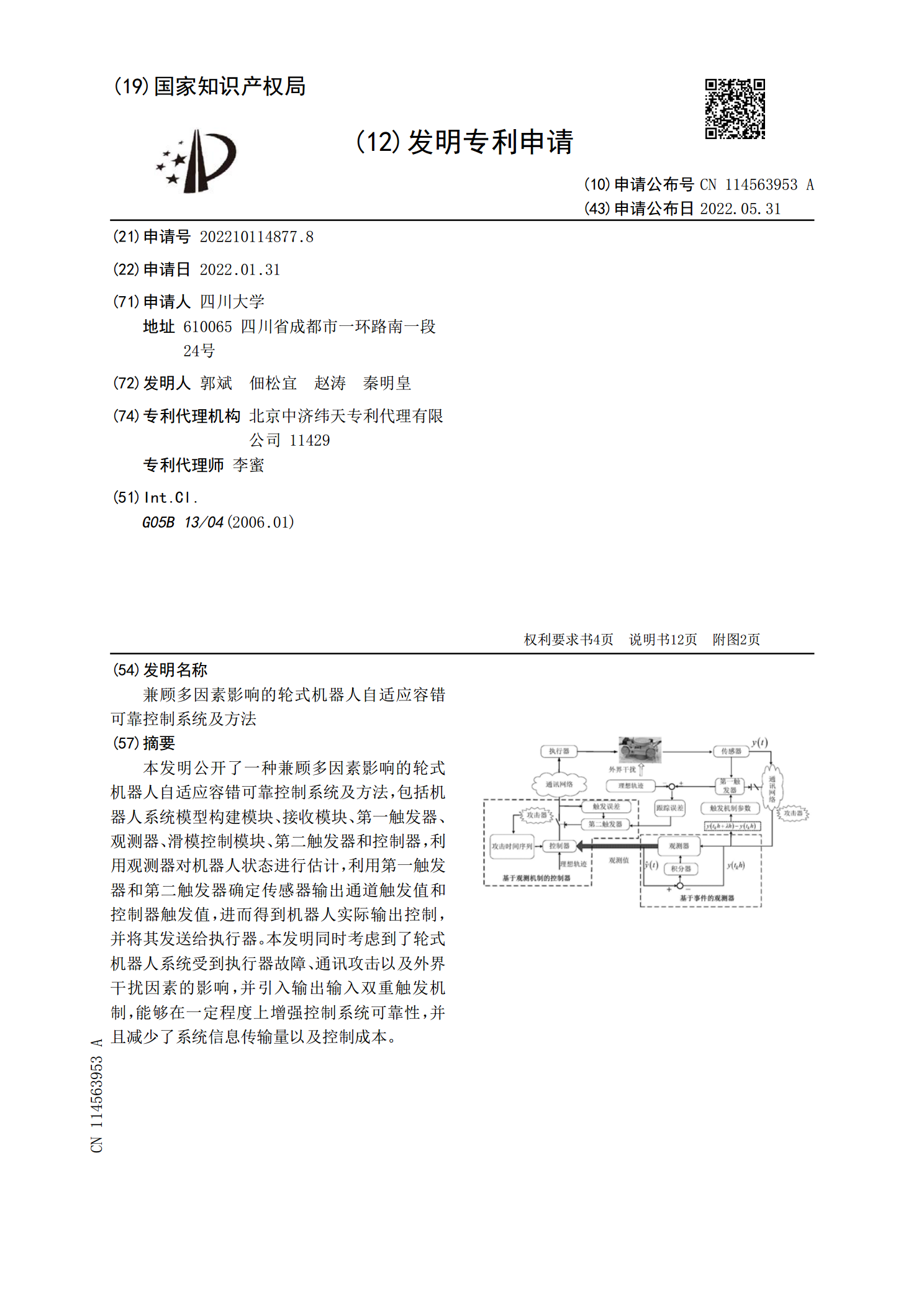
兼顾多因素影响的轮式机器人自适应容错可靠控制系统及方法.pdf
本发明公开了一种兼顾多因素影响的轮式机器人自适应容错可靠控制系统及方法,包括机器人系统模型构建模块、接收模块、第一触发器、观测器、滑模控制模块、第二触发器和控制器,利用观测器对机器人状态进行估计,利用第一触发器和第二触发器确定传感器输出通道触发值和控制器触发值,进而得到机器人实际输出控制,并将其发送给执行器。本发明同时考虑到了轮式机器人系统受到执行器故障、通讯攻击以及外界干扰因素的影响,并引入输出输入双重触发机制,能够在一定程度上增强控制系统可靠性,并且减少了系统信息传输量以及控制成本。
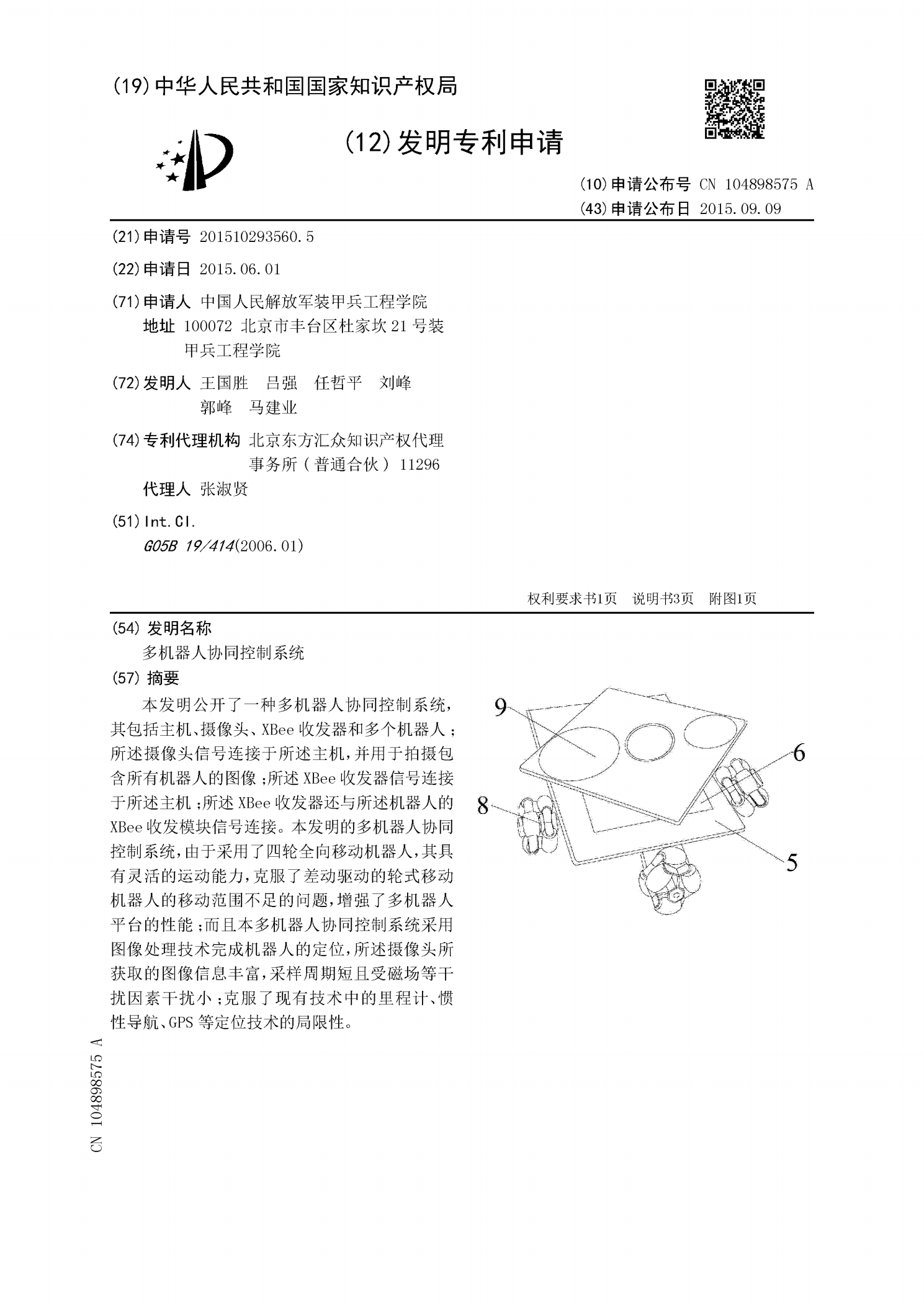
多机器人协同控制系统.pdf
本发明公开了一种多机器人协同控制系统,其包括主机、摄像头、XBee收发器和多个机器人;所述摄像头信号连接于所述主机,并用于拍摄包含所有机器人的图像;所述XBee收发器信号连接于所述主机;所述XBee收发器还与所述机器人的XBee收发模块信号连接。本发明的多机器人协同控制系统,由于采用了四轮全向移动机器人,其具有灵活的运动能力,克服了差动驱动的轮式移动机器人的移动范围不足的问题,增强了多机器人平台的性能;而且本多机器人协同控制系统采用图像处理技术完成机器人的定位,所述摄像头所获取的图像信息丰富,采样周期短且
多机器人协同控制系统.pdf
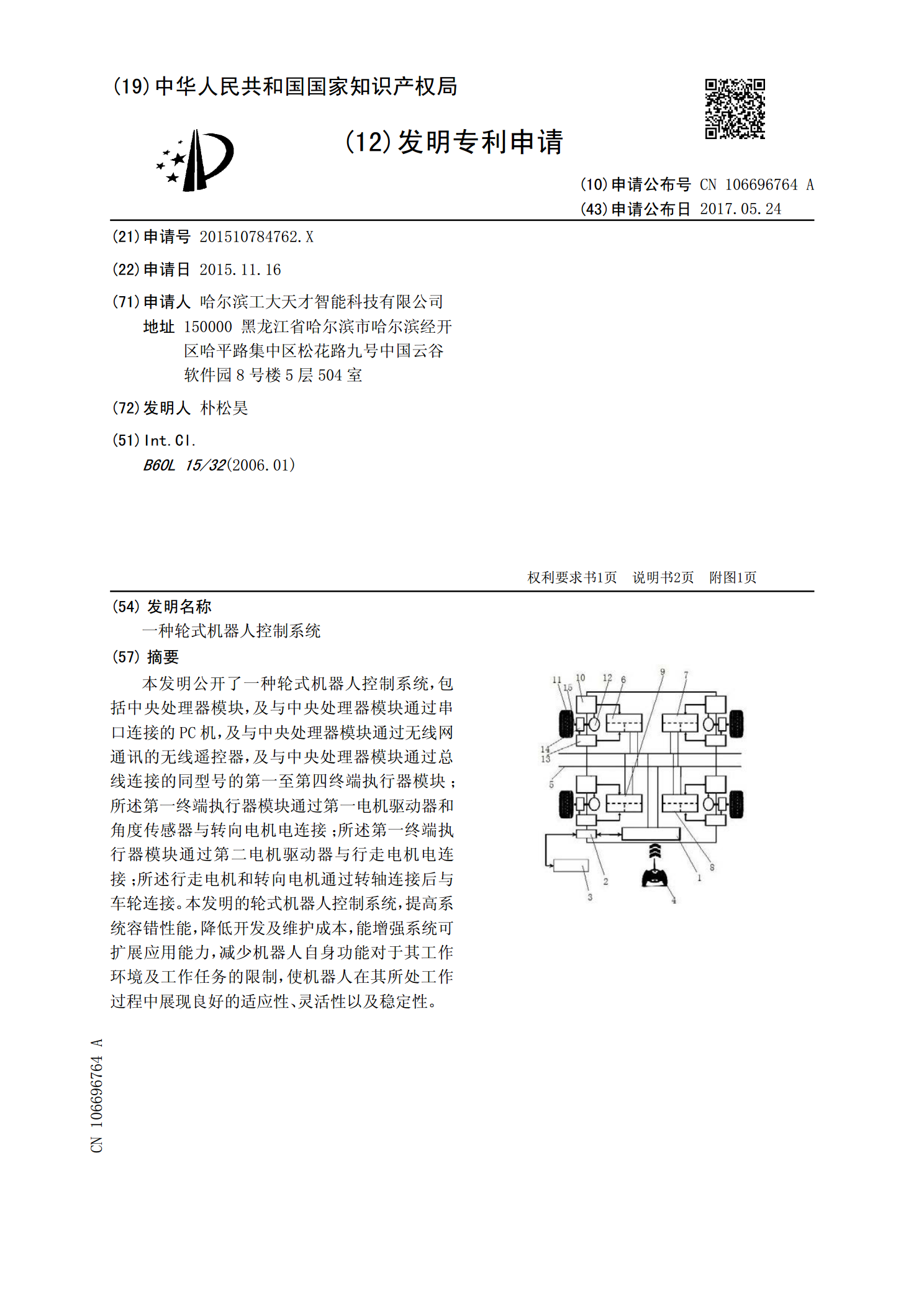
一种轮式机器人控制系统.pdf
本发明公开了一种轮式机器人控制系统,包括中央处理器模块,及与中央处理器模块通过串口连接的PC机,及与中央处理器模块通过无线网通讯的无线遥控器,及与中央处理器模块通过总线连接的同型号的第一至第四终端执行器模块;所述第一终端执行器模块通过第一电机驱动器和角度传感器与转向电机电连接;所述第一终端执行器模块通过第二电机驱动器与行走电机电连接;所述行走电机和转向电机通过转轴连接后与车轮连接。本发明的轮式机器人控制系统,提高系统容错性能,降低开发及维护成本,能增强系统可扩展应用能力,减少机器人自身功能对于其工作环境及