
一种临床O型臂X光机.pdf

书生****aa

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种临床O型臂X光机.pdf
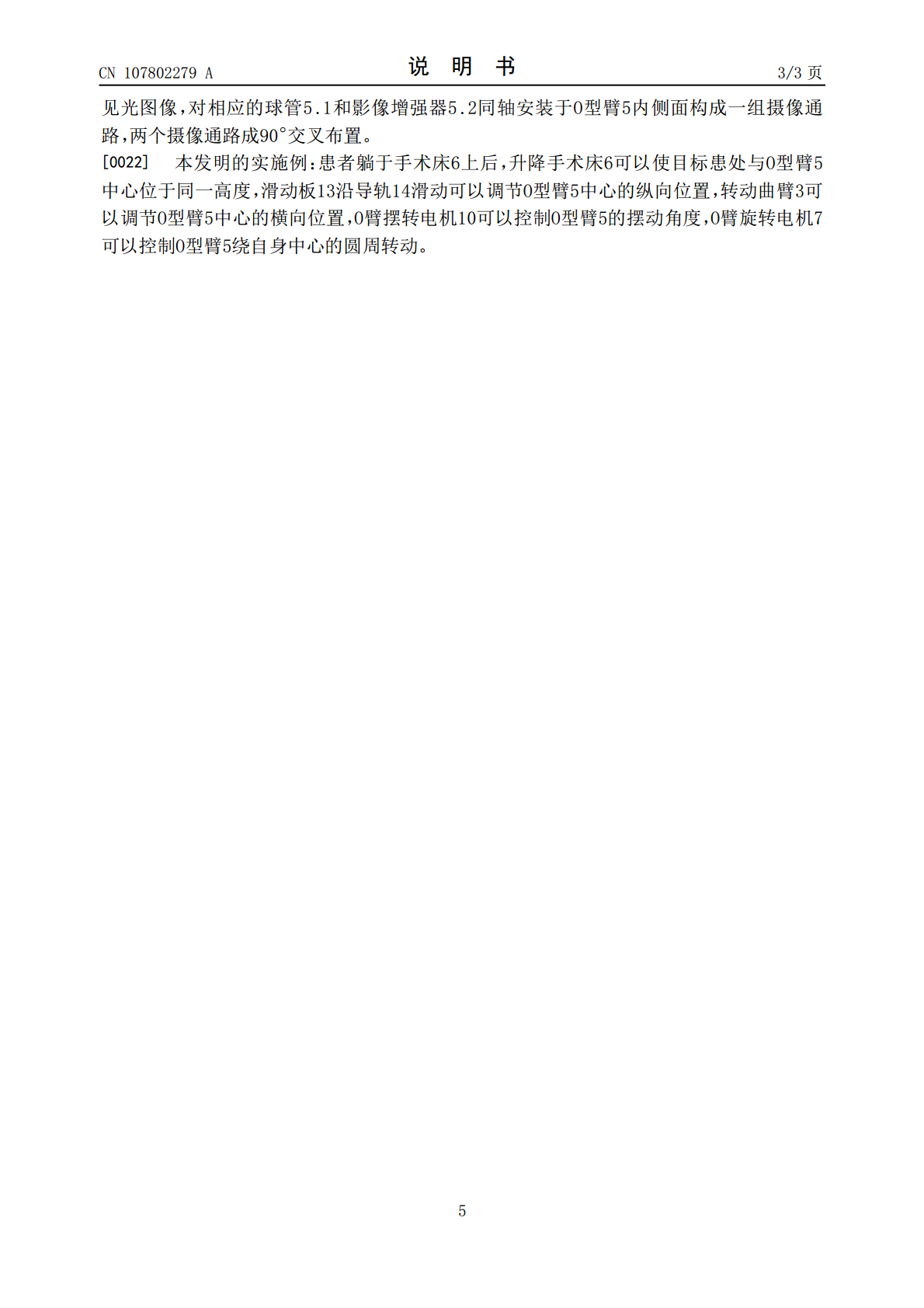
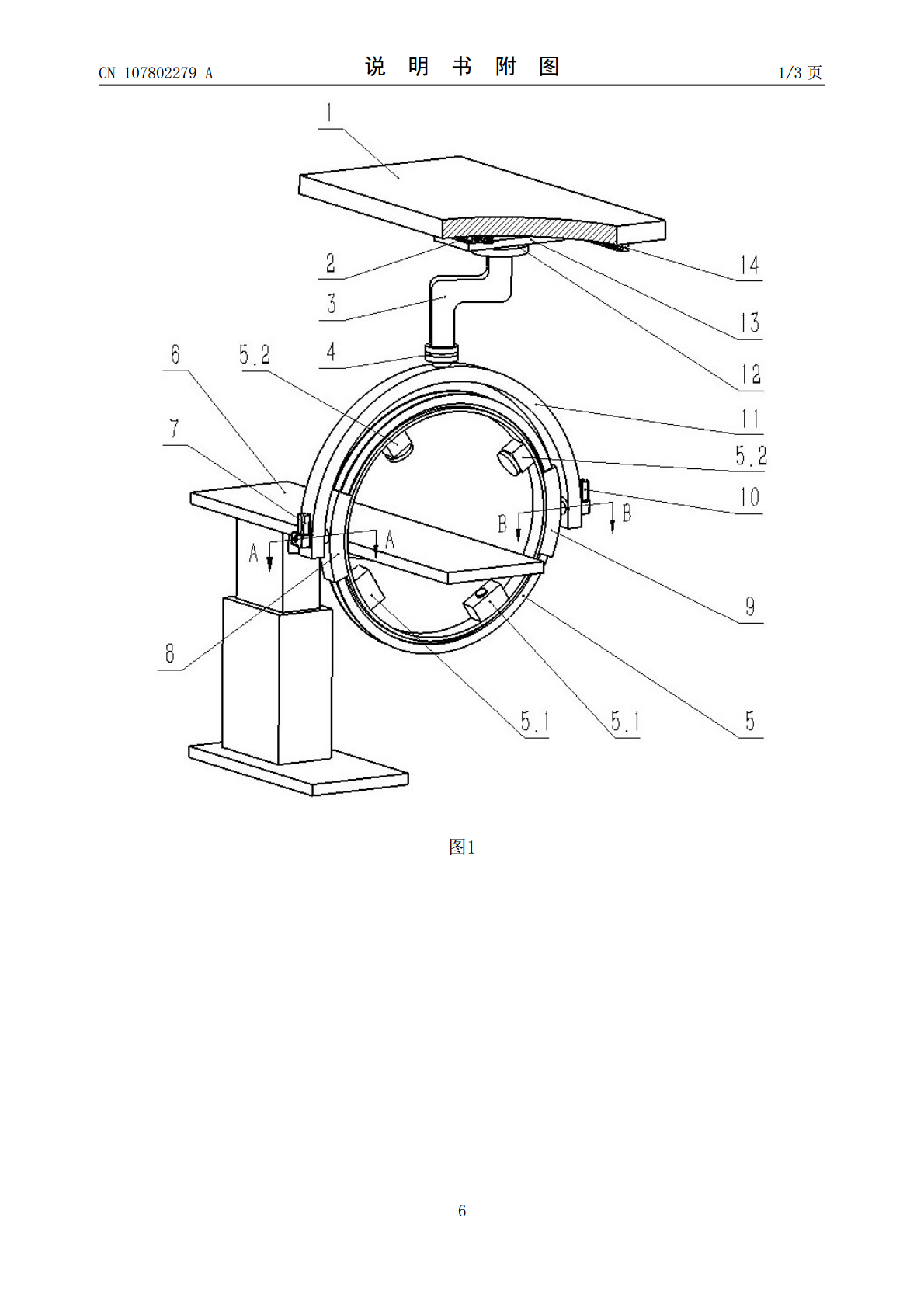
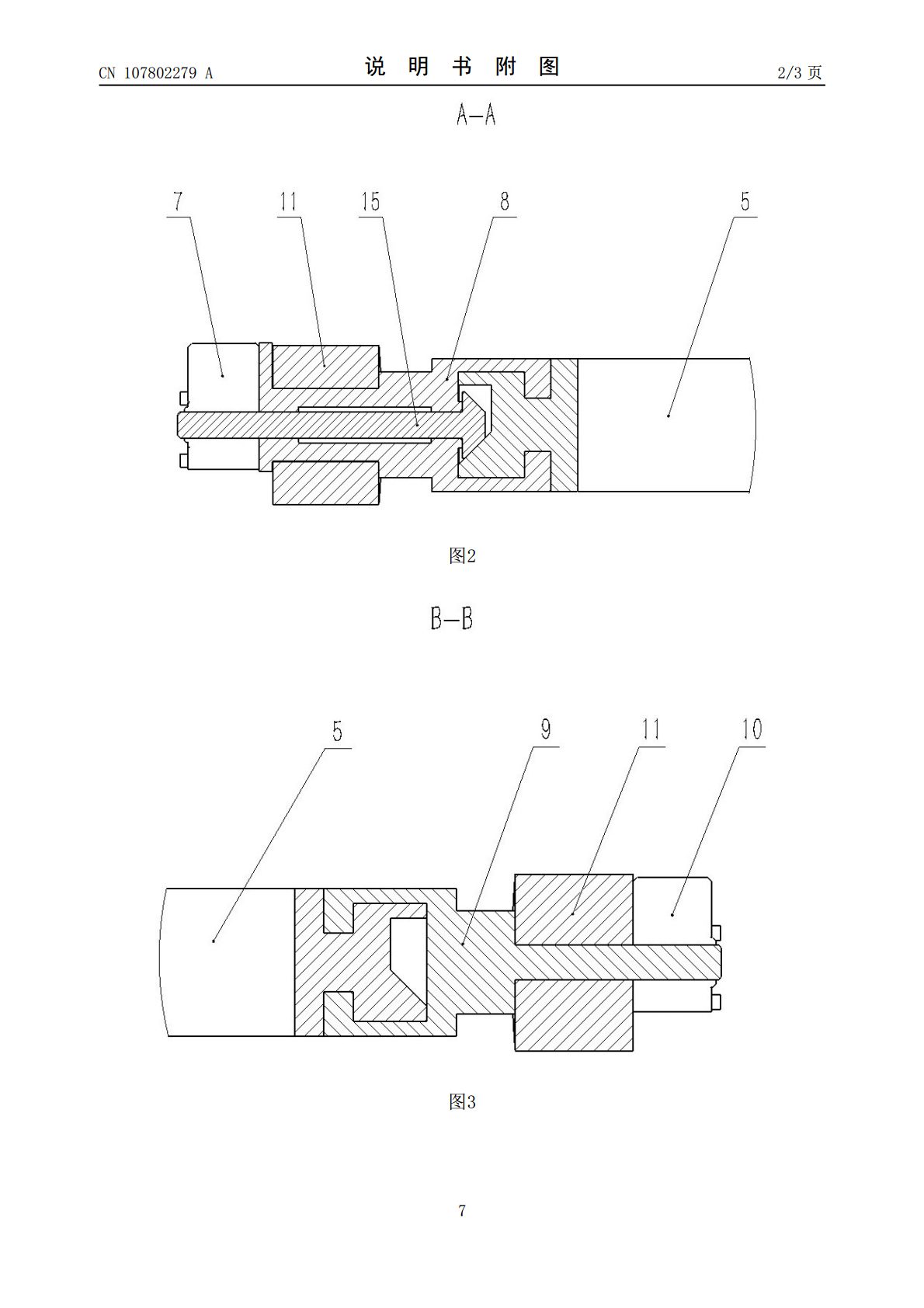
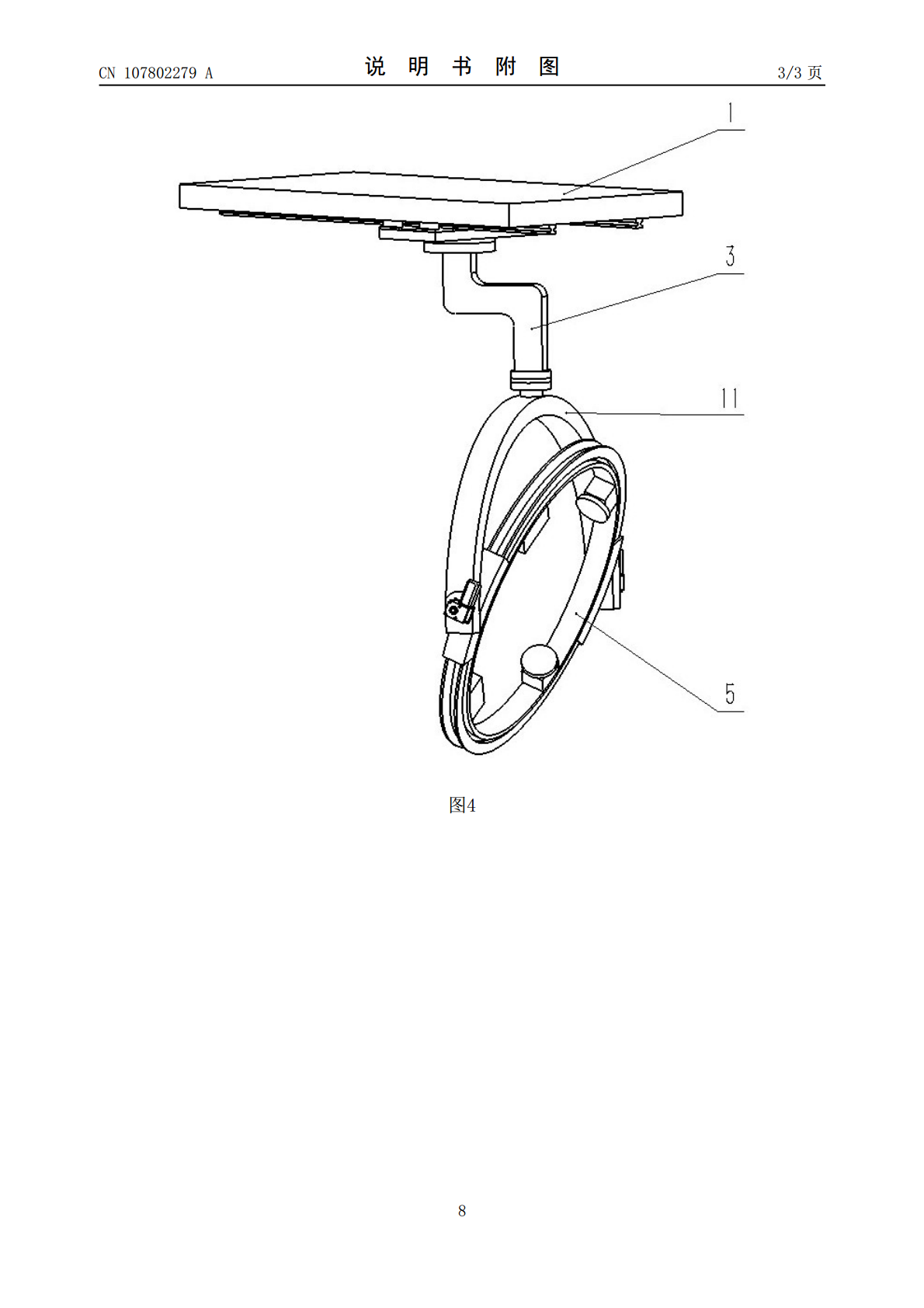
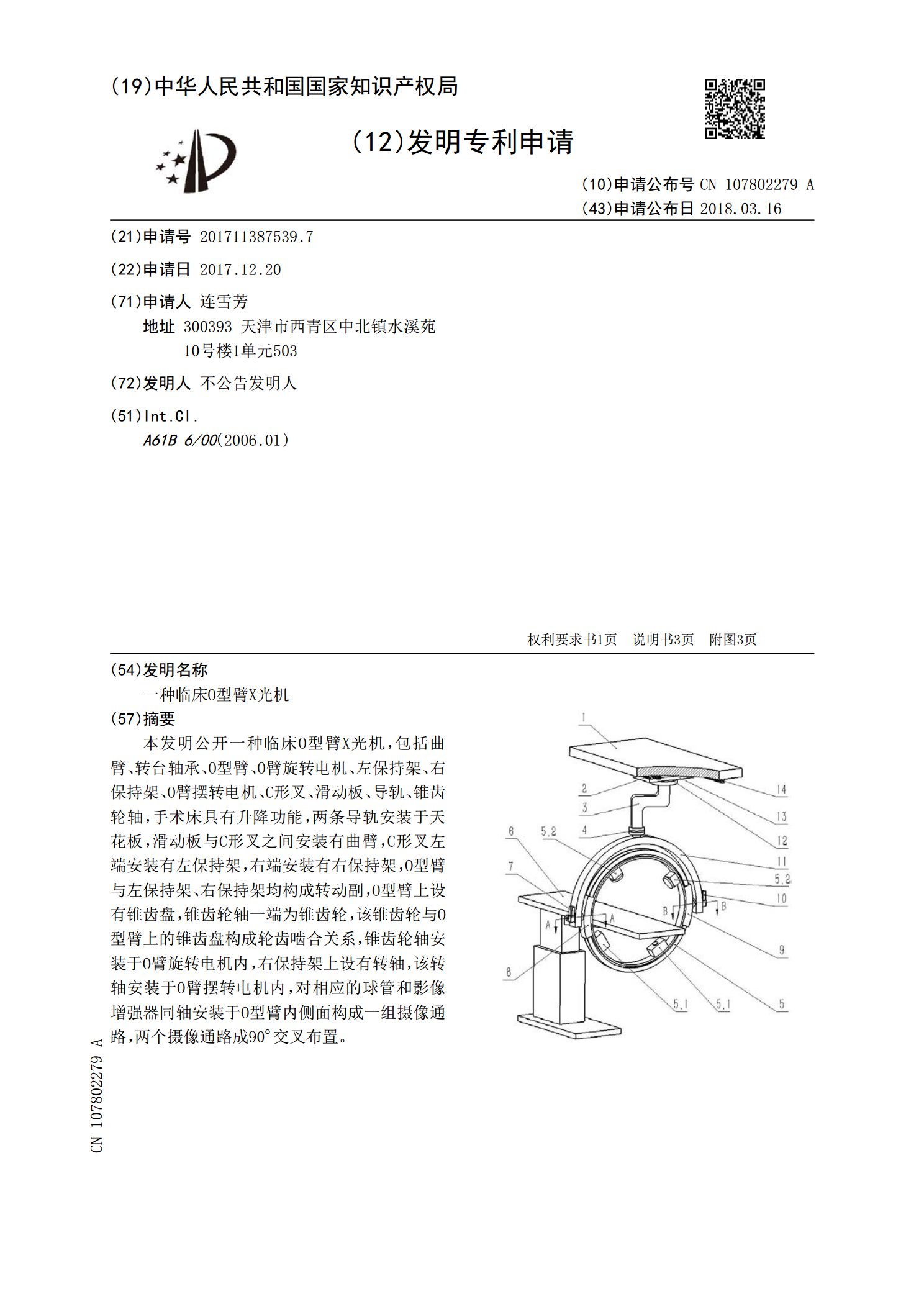
本发明公开一种临床O型臂X光机,包括曲臂、转台轴承、O型臂、O臂旋转电机、左保持架、右保持架、O臂摆转电机、C形叉、滑动板、导轨、锥齿轮轴,手术床具有升降功能,两条导轨安装于天花板,滑动板与C形叉之间安装有曲臂,C形叉左端安装有左保持架,右端安装有右保持架,O型臂与左保持架、右保持架均构成转动副,O型臂上设有锥齿盘,锥齿轮轴一端为锥齿轮,该锥齿轮与O型臂上的锥齿盘构成轮齿啮合关系,锥齿轮轴安装于O臂旋转电机内,右保持架上设有转轴,该转轴安装于O臂摆转电机内,对相应的球管和影像增强器同轴安装于O型臂内侧面构
一种临床C型臂X光机.pdf
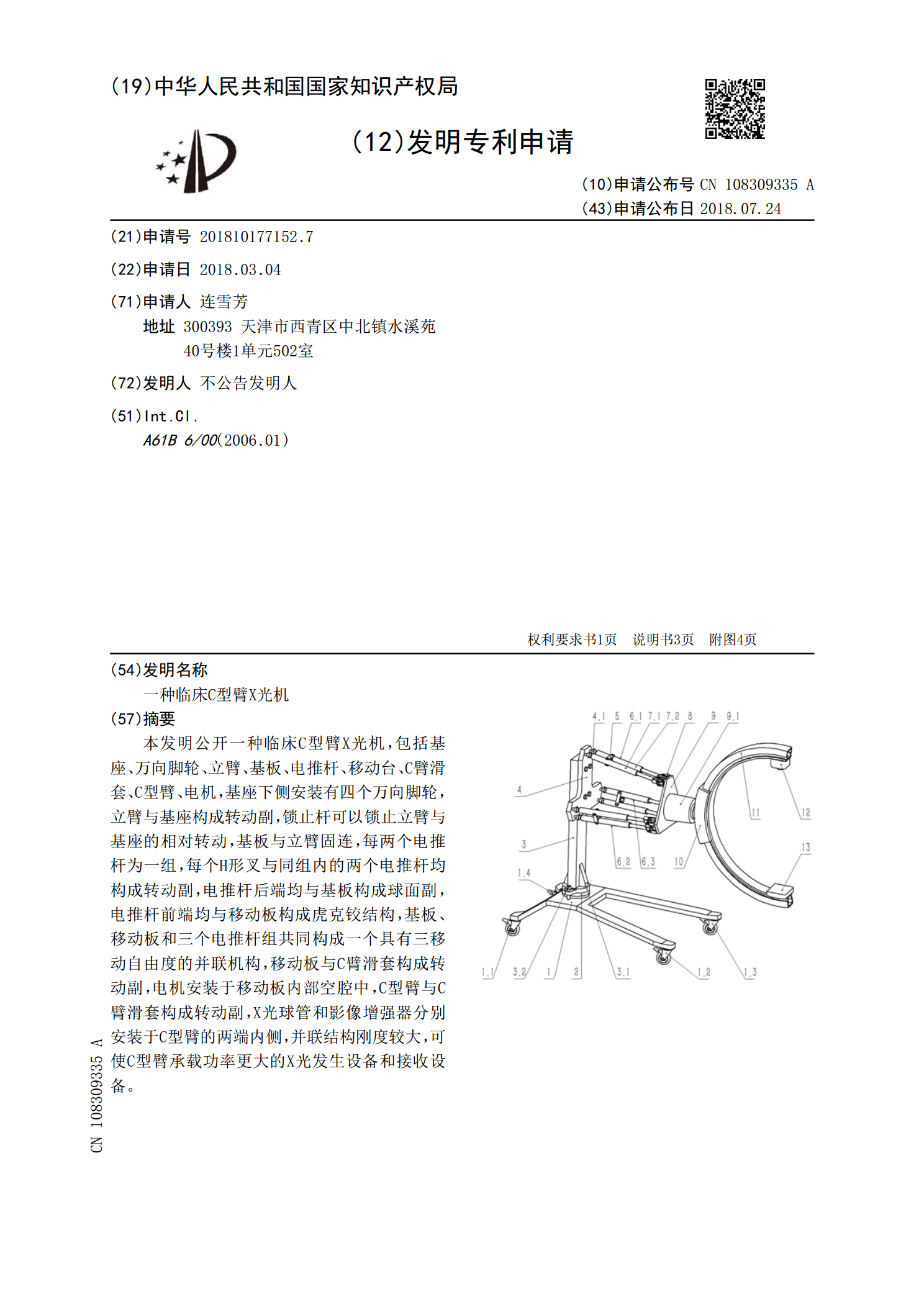
本发明公开一种临床C型臂X光机,包括基座、万向脚轮、立臂、基板、电推杆、移动台、C臂滑套、C型臂、电机,基座下侧安装有四个万向脚轮,立臂与基座构成转动副,锁止杆可以锁止立臂与基座的相对转动,基板与立臂固连,每两个电推杆为一组,每个H形叉与同组内的两个电推杆均构成转动副,电推杆后端均与基板构成球面副,电推杆前端均与移动板构成虎克铰结构,基板、移动板和三个电推杆组共同构成一个具有三移动自由度的并联机构,移动板与C臂滑套构成转动副,电机安装于移动板内部空腔中,C型臂与C臂滑套构成转动副,X光球管和影像增强器分别
C型臂X光机申购报告.pdf
C型臂X光机申购报告一.C型臂X光机顾名思义该设备有C型的机架,产生x射线的球管,采集图像的影像增强器和CCD摄像机,以及图像处理的工作站组成。主要用于各种手术中的造影,摄影等工作。二.C型臂X光机分类1.小C〔骨科C臂〕主要用途:〔1〕、骨科:整骨、复位、关节内骨折、长骨折置入髓内钉、脊柱骨折复位、置钉。全面了解、评估复位及内固定物置入效果情况,并可在手术室无菌环境、患者麻醉状态下完成,俗称骨外科医生的“眼睛”。〔2〕、外科:取体内异物、植入起搏器、部分介入治疗、部分造影术及局部摄影等工作〔3〕、其他:

C型臂X光机申购报告.doc
C型臂X光机申购报告一.C型臂X光机顾名思义该设备有C型的机架,产生x射线的球管,采集图像的影像增强器和CCD摄像机,以及图像处理的工作站组成。主要用于各种手术中的造影,摄影等工作。二.C型臂X光机分类1.小C(骨科C臂)主要用途:(1)、骨科:整骨、复位、关节内骨折、长骨折置入髓内钉、脊柱骨折复位、置钉。全面了解、评估复位及内固定物置入效果情况,并可在手术室无菌环境、患者麻醉状态下完成,俗称骨外科医生的“眼睛”。(2)、外科:取体内异物、植入起搏器、部分介入治疗、部分造影术及局部摄影等工作(3)、其他:

C型臂X光机基础培训.ppt
C型臂X光机基础培训C型臂X光机定义c型臂x光机:顾名思义该设备有C型的机架,产生x射线的球管,采集图像的影像增强器和CCD摄像机,以及图像处理的工作站组成。主要用于各种手术中的造影,摄影等工作。另外也区别与其他的x射线设备比如:U型臂,G形臂等等。C形臂X光机的分类:临床应用:C型臂X射线辐射的防护现将手术过程中使用C型臂X线机的防护体会总结如下:手术室的电离辐射的防护现状我科使用C型臂X线机(单球管型C臂机)主要用于骨科手术,在实际工作中多数医护人员认为术中操作繁琐、为了缩短C型臂X线机使用时间,重自