
一种高精度停位的AGV车辆叉取装置及其停位方法.pdf

邻家****mk

1/8

2/8

3/8
4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高精度停位的AGV车辆叉取装置及其停位方法.pdf
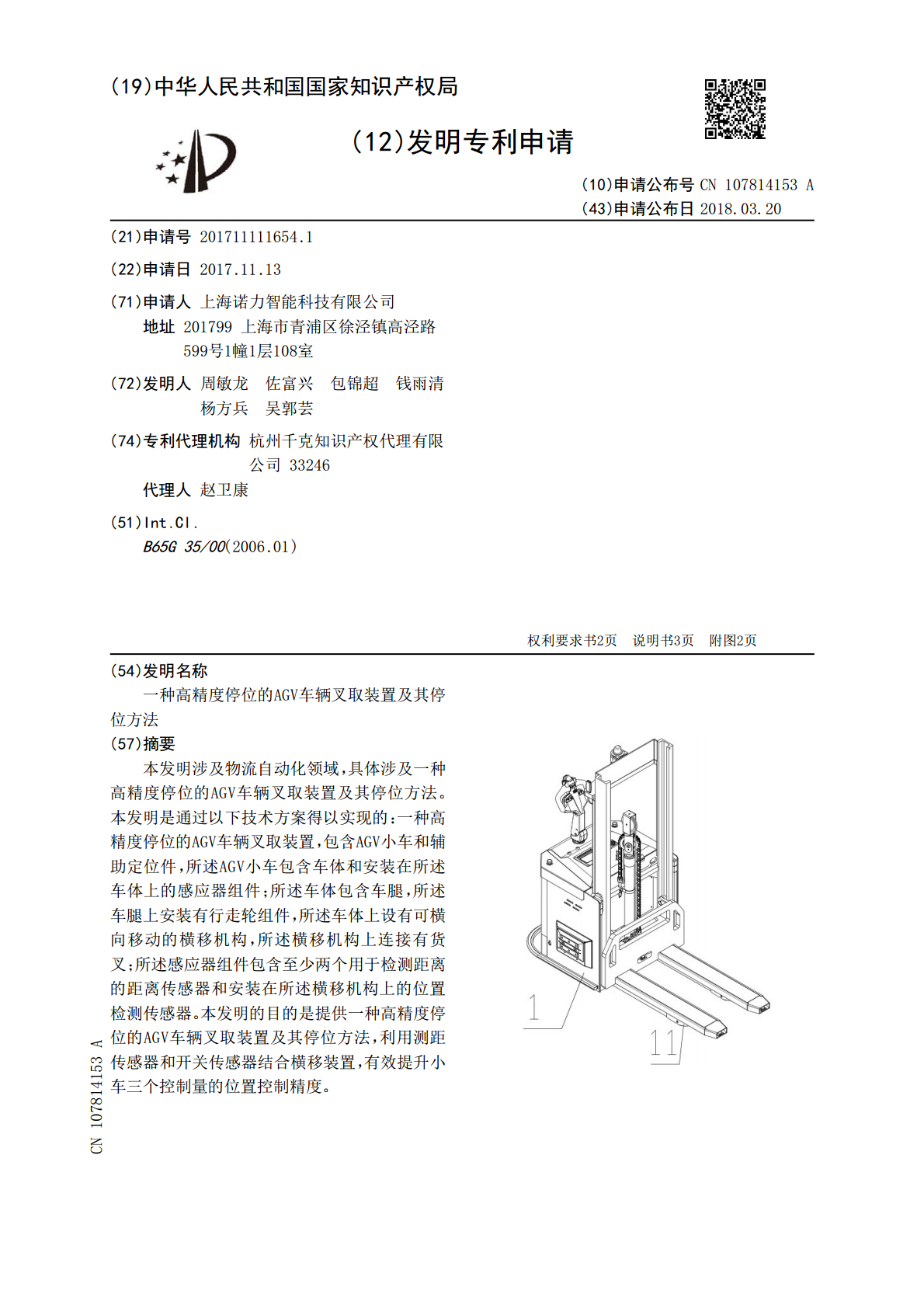
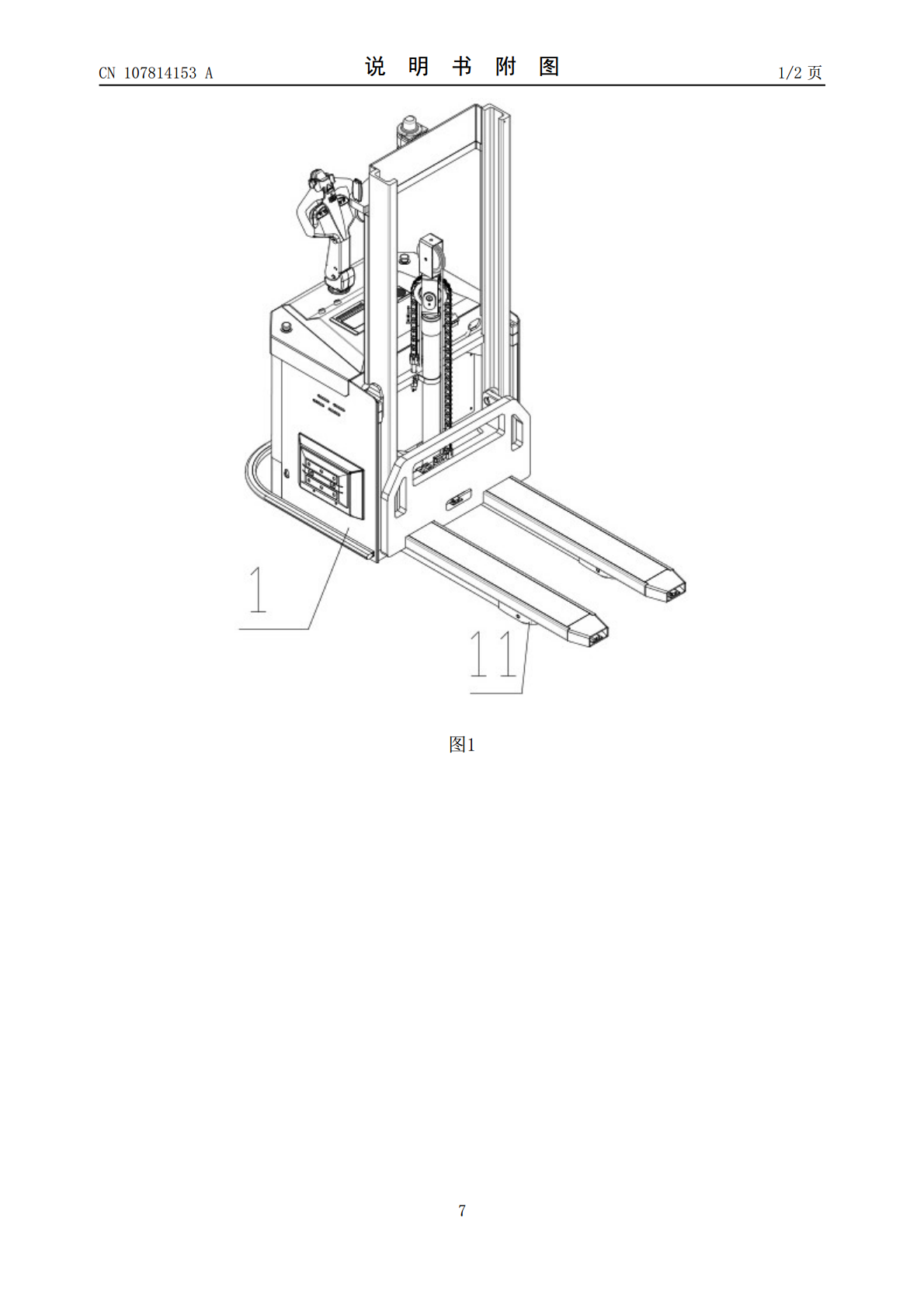
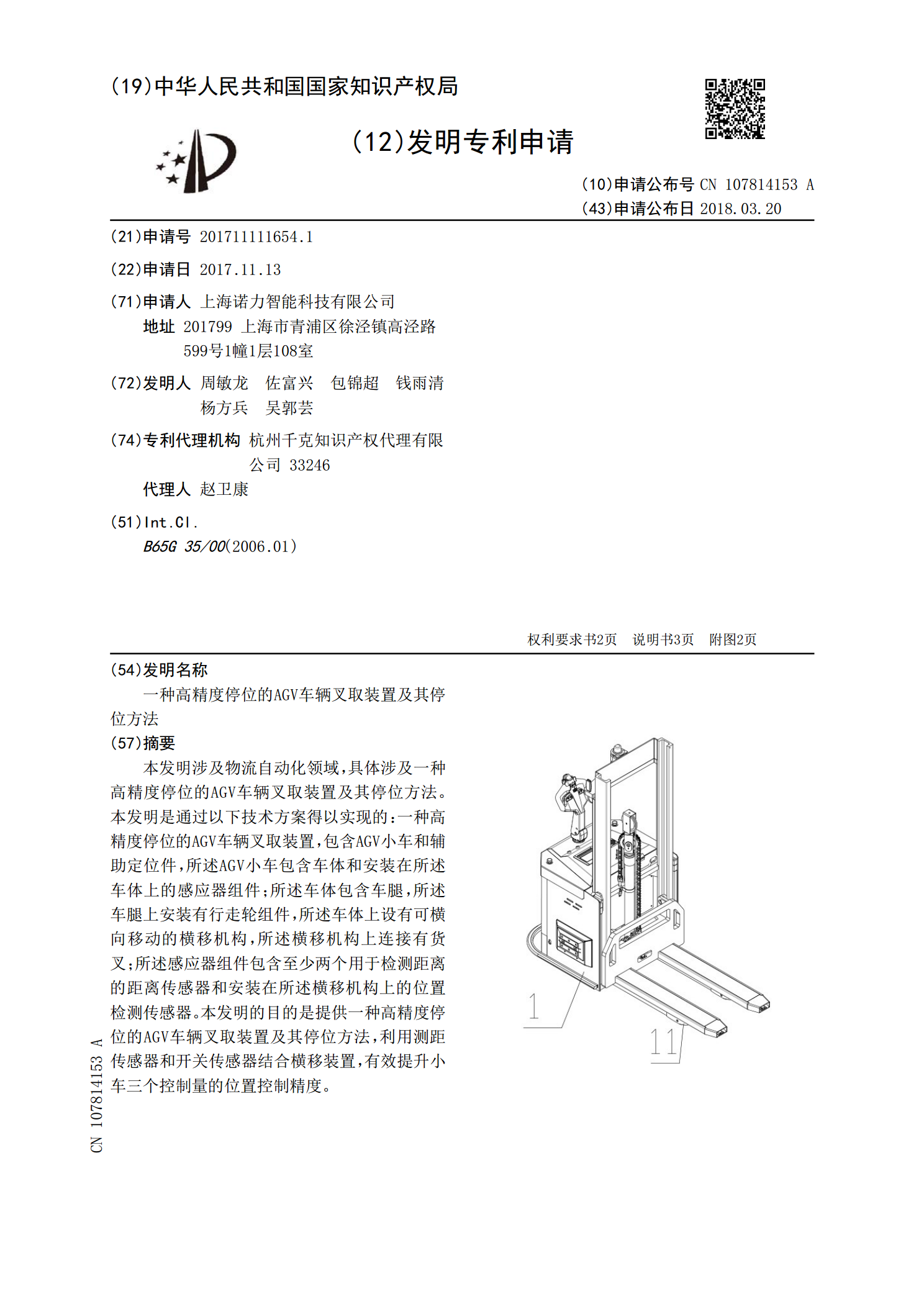
本发明涉及物流自动化领域,具体涉及一种高精度停位的AGV车辆叉取装置及其停位方法。本发明是通过以下技术方案得以实现的:一种高精度停位的AGV车辆叉取装置,包含AGV小车和辅助定位件,所述AGV小车包含车体和安装在所述车体上的感应器组件;所述车体包含车腿,所述车腿上安装有行走轮组件,所述车体上设有可横向移动的横移机构,所述横移机构上连接有货叉;所述感应器组件包含至少两个用于检测距离的距离传感器和安装在所述横移机构上的位置检测传感器。本发明的目的是提供一种高精度停位的AGV车辆叉取装置及其停位方法,利用测距传

具有双停位功能的减速装置.pdf
本发明提供了一种具有双停位功能的减速装置,能够实现传统电动机构减速装置不具有的中停位功能,且该方案不需要额外安装传感器。本发明包括滑环、四路电气线及转换开关,所述四路电气线的一端均以触头形式与滑环的正面相接,其中,第一电气线、第二电气线、第三电气线以及第四电气线的触头沿滑环上的半径线由内向外依次设置,且这四个触头保持相对固定,所述滑环的背面与减速机构输出端蜗轮相对固定,蜗轮能够带动滑环转动使四个触头在滑环的正面形成四个同心圆轨迹。本发明通过减速装置蜗轮转动过程中滑环与接触片的接触与否来控制电源与电动机的通
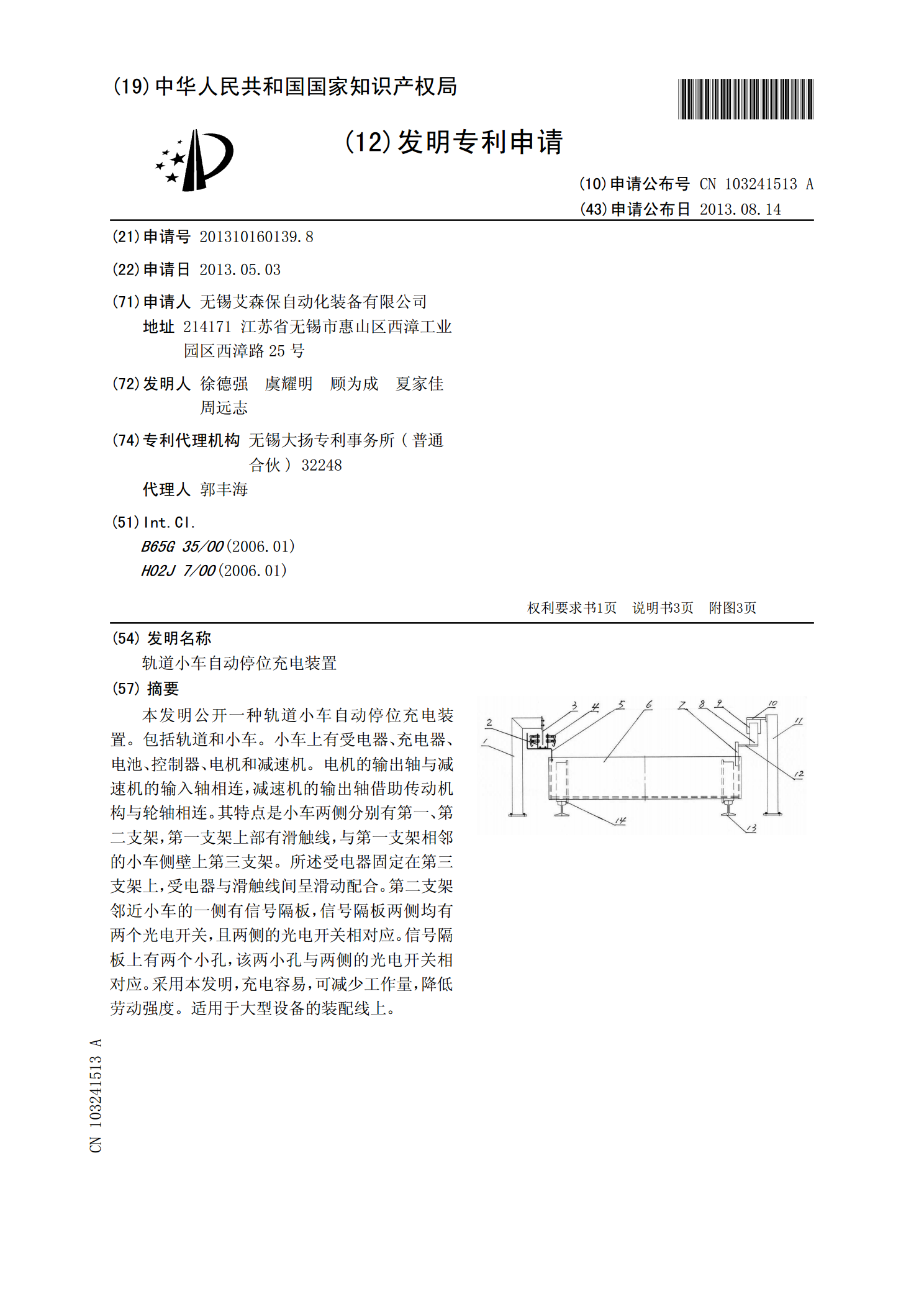
轨道小车自动停位充电装置.pdf
本发明公开一种轨道小车自动停位充电装置。包括轨道和小车。小车上有受电器、充电器、电池、控制器、电机和减速机。电机的输出轴与减速机的输入轴相连,减速机的输出轴借助传动机构与轮轴相连。其特点是小车两侧分别有第一、第二支架,第一支架上部有滑触线,与第一支架相邻的小车侧壁上第三支架。所述受电器固定在第三支架上,受电器与滑触线间呈滑动配合。第二支架邻近小车的一侧有信号隔板,信号隔板两侧均有两个光电开关,且两侧的光电开关相对应。信号隔板上有两个小孔,该两小孔与两侧的光电开关相对应。采用本发明,充电容易,可减少工作量,
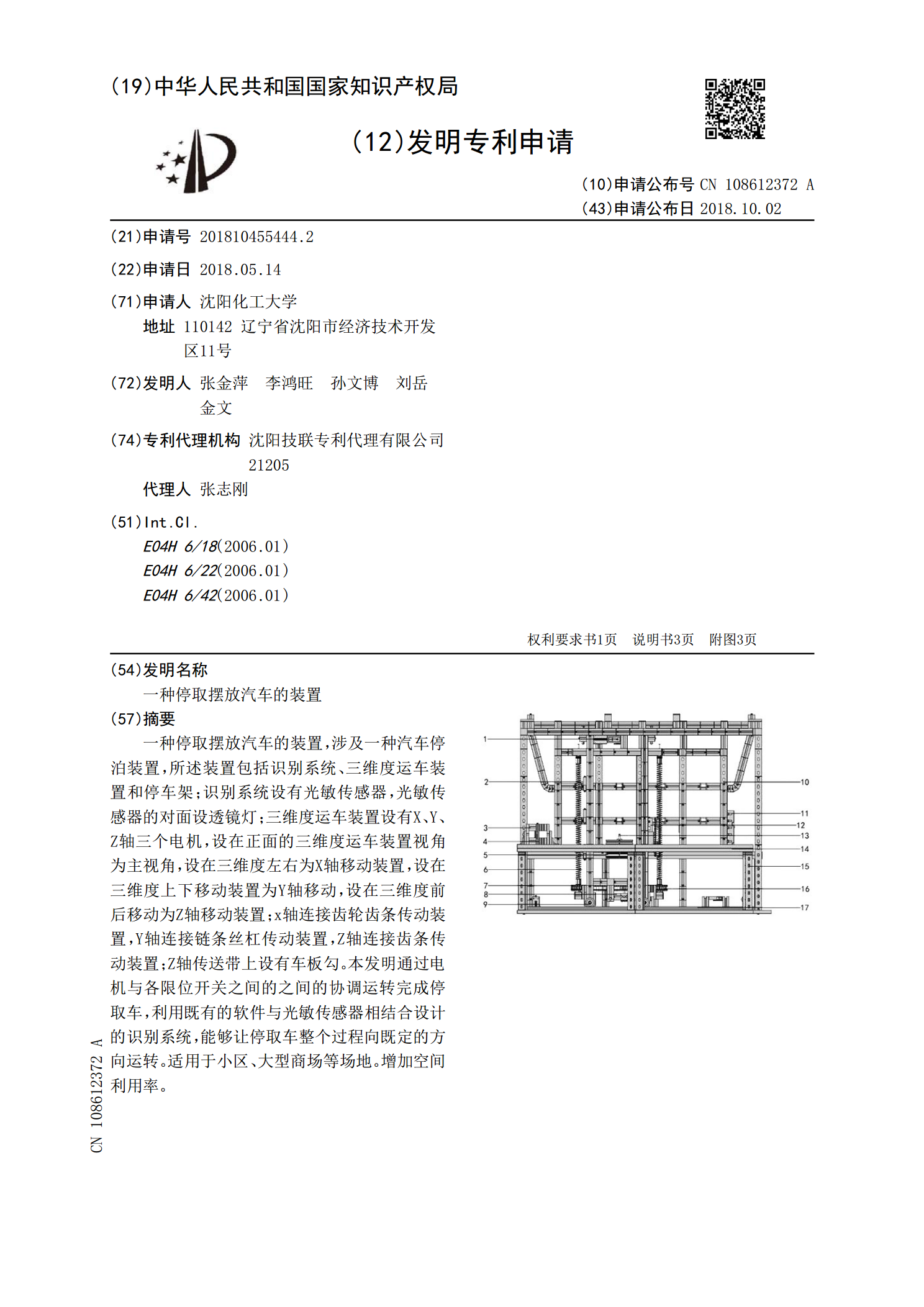
一种停取摆放汽车的装置.pdf
一种停取摆放汽车的装置,涉及一种汽车停泊装置,所述装置包括识别系统、三维度运车装置和停车架;识别系统设有光敏传感器,光敏传感器的对面设透镜灯;三维度运车装置设有X、Y、Z轴三个电机,设在正面的三维度运车装置视角为主视角,设在三维度左右为X轴移动装置,设在三维度上下移动装置为Y轴移动,设在三维度前后移动为Z轴移动装置;x轴连接齿轮齿条传动装置,Y轴连接链条丝杠传动装置,Z轴连接齿条传动装置;Z轴传送带上设有车板勾。本发明通过电机与各限位开关之间的之间的协调运转完成停取车,利用既有的软件与光敏传感器相结合设计

一种纺丝车间增加开、停位延时保护装置.pdf
本发明公开了一种纺丝车间增加开、停位延时保护装置,其结构包括交流电源、第一断路器和第一按钮,在第一接触器失电断开后,第一接触器常开辅助触点给PLC输入端输入跳变负脉冲,PLC输出端输出端动作,第一继电器吸合,第一继电器常闭触点断开,在PLC内电路定时器到达设定时间后,第一继电器断开,控制回路第一继电器常闭触点闭合,起到停电延时保护;第一计量泵启动后,第一接触器常开辅助触点给PLC输入端输入跳变正脉冲,PLC输出端动作,第二继电器、第三继电器和第四继电器吸合,控制回路第二继电器、第三继电器和第四继电器常闭触