
一种多自由度拾取机构.pdf

是你****枝呀


1/7
2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多自由度拾取机构.pdf
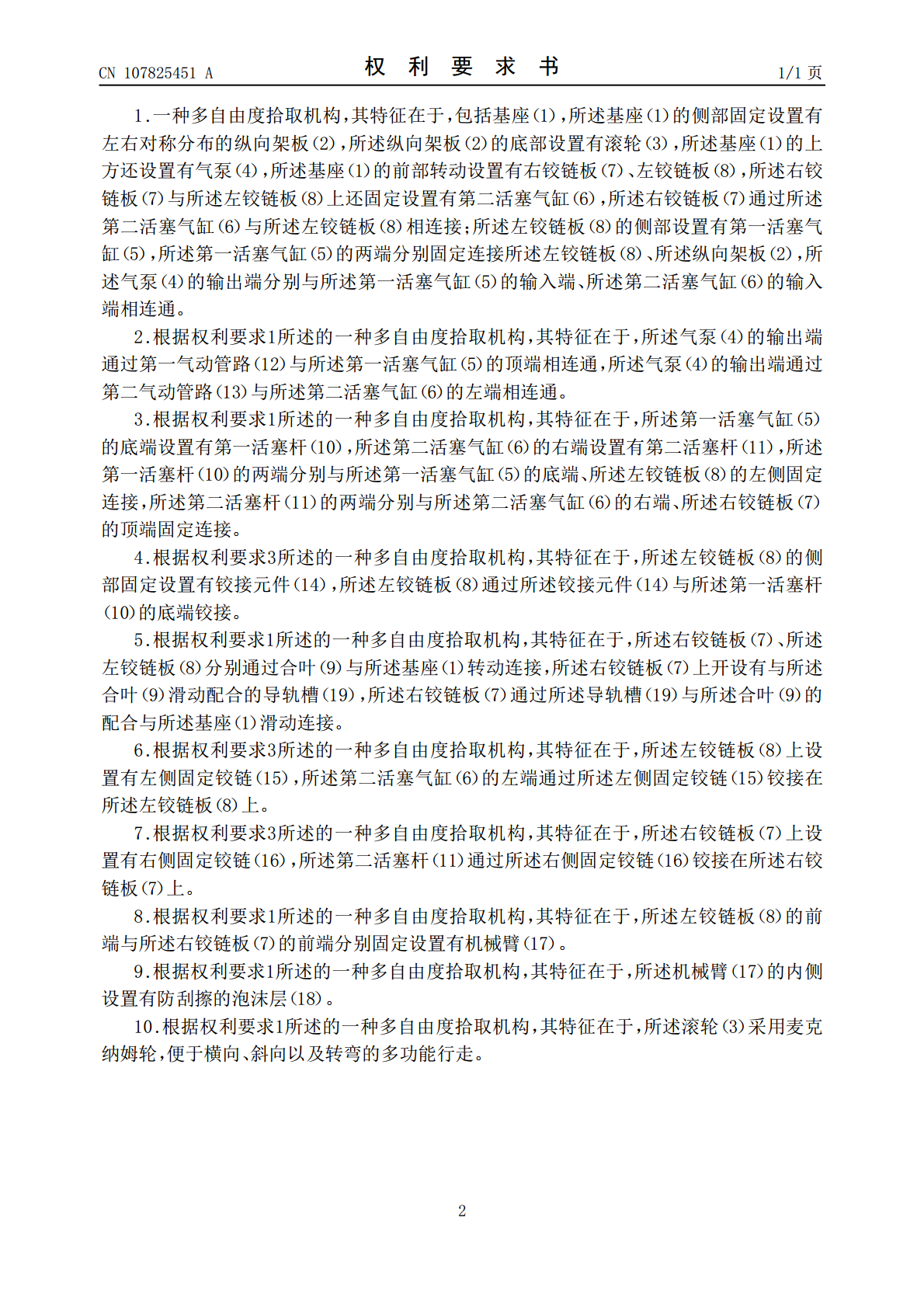
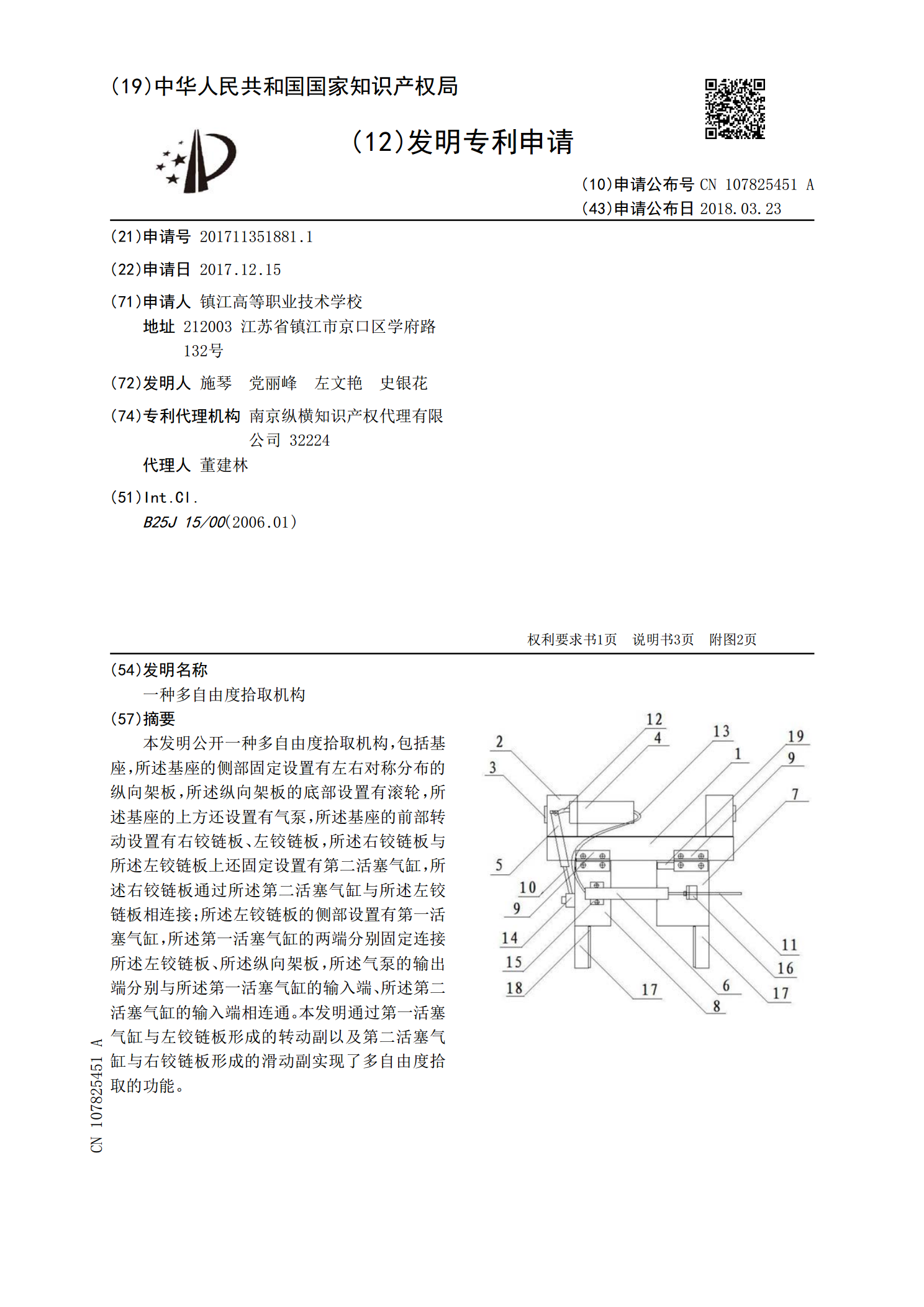
本发明公开一种多自由度拾取机构,包括基座,所述基座的侧部固定设置有左右对称分布的纵向架板,所述纵向架板的底部设置有滚轮,所述基座的上方还设置有气泵,所述基座的前部转动设置有右铰链板、左铰链板,所述右铰链板与所述左铰链板上还固定设置有第二活塞气缸,所述右铰链板通过所述第二活塞气缸与所述左铰链板相连接;所述左铰链板的侧部设置有第一活塞气缸,所述第一活塞气缸的两端分别固定连接所述左铰链板、所述纵向架板,所述气泵的输出端分别与所述第一活塞气缸的输入端、所述第二活塞气缸的输入端相连通。本发明通过第一活塞气缸与左铰链
一种多自由度机构.pdf
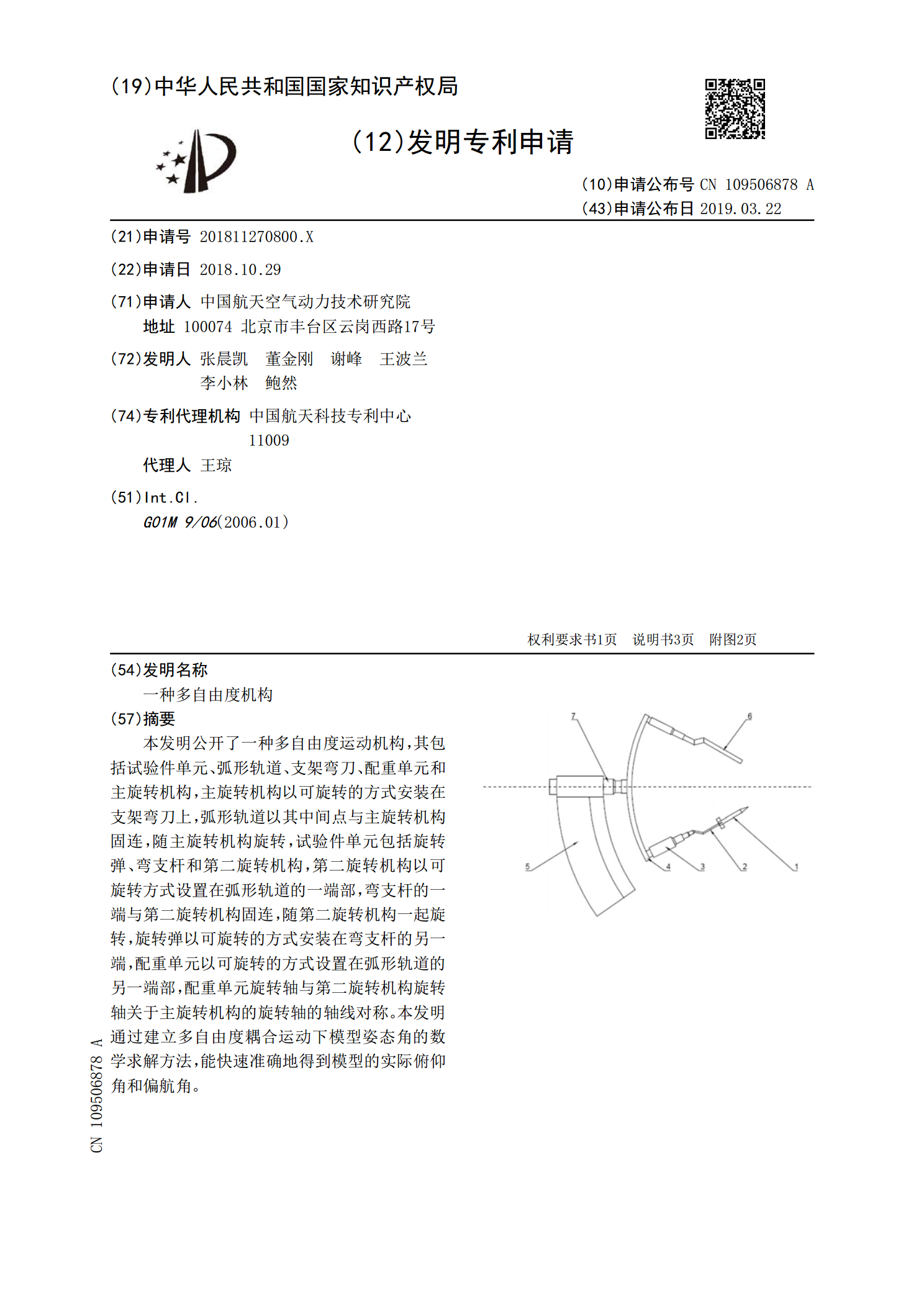
本发明公开了一种多自由度运动机构,其包括试验件单元、弧形轨道、支架弯刀、配重单元和主旋转机构,主旋转机构以可旋转的方式安装在支架弯刀上,弧形轨道以其中间点与主旋转机构固连,随主旋转机构旋转,试验件单元包括旋转弹、弯支杆和第二旋转机构,第二旋转机构以可旋转方式设置在弧形轨道的一端部,弯支杆的一端与第二旋转机构固连,随第二旋转机构一起旋转,旋转弹以可旋转的方式安装在弯支杆的另一端,配重单元以可旋转的方式设置在弧形轨道的另一端部,配重单元旋转轴与第二旋转机构旋转轴关于主旋转机构的旋转轴的轴线对称。本发明通过建立

一种多自由度仿生机构.pdf
一种多自由度仿生机构,包括连接机构本体和振动翼,振动翼与机构本体的转动臂相连接,连接机构本体包括齿轮驱动电机、主动齿轮、从动齿轮、导轨、转动轴、转动箱体和转动臂。从动齿轮通过从动齿轮直线轴承安装在转动轴上,主动齿轮与齿轮驱动电机连接,齿轮驱动电机带动主动齿轮旋转,从动齿轮与主动齿轮啮合且由主动齿轮带动旋转。而且从动齿轮上焊接了四根导轨,四根导轨与转动箱体相连。转动臂通过销钉与转动箱体连接,当从动齿轮转动时能够带动转动箱体的旋转,同时转动臂也跟着一起转动;主动齿轮和从动齿轮的连续性转动,能够驱动转动臂实现正

一种拾取模组及拾取机构.pdf
本实用新型涉及生产设备技术领域,具体涉及一种拾取模组及拾取机构。本实用新型提供的拾取模组包括:壳体;拾取单元,包括:圆轴,所述圆轴表面加工有螺旋槽和平行于自身轴线的条形槽;滚珠丝杠螺母,与所述壳体可转动连接,通过所述螺旋槽与所述圆轴连接;滚珠花键螺母,与所述壳体可转动连接,通过所述条形槽与所述圆轴连接;第一驱动组件,与所述滚珠丝杠螺母传动连接,适于驱动所述滚珠丝杠螺母转动;第二驱动组件,与所述滚珠花键螺母传动连接,适于驱动所述滚珠花键螺母转动;执行元件,固定安装在所述圆轴的端部,适于完成夹持和/或脱手动作
一种多自由度精密调整机构.pdf
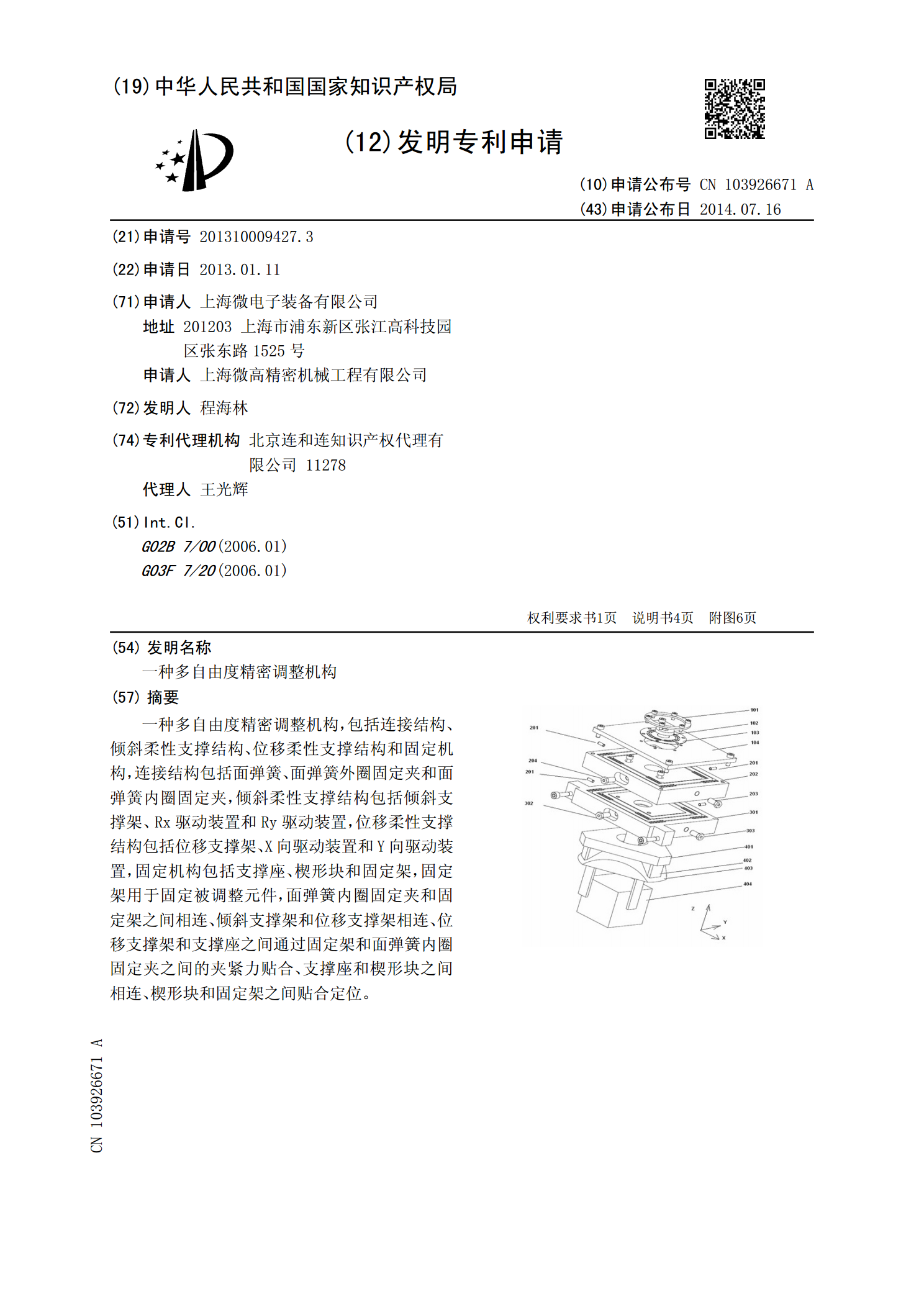
一种多自由度精密调整机构,包括连接结构、倾斜柔性支撑结构、位移柔性支撑结构和固定机构,连接结构包括面弹簧、面弹簧外圈固定夹和面弹簧内圈固定夹,倾斜柔性支撑结构包括倾斜支撑架、Rx驱动装置和Ry驱动装置,位移柔性支撑结构包括位移支撑架、X向驱动装置和Y向驱动装置,固定机构包括支撑座、楔形块和固定架,固定架用于固定被调整元件,面弹簧内圈固定夹和固定架之间相连、倾斜支撑架和位移支撑架相连、位移支撑架和支撑座之间通过固定架和面弹簧内圈固定夹之间的夹紧力贴合、支撑座和楔形块之间相连、楔形块和固定架之间贴合定位。