
一种基于视觉路标的室内移动机器人定位方法.pdf

小长****6淑

1/8
2/8
3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于视觉路标的室内移动机器人定位方法.pdf
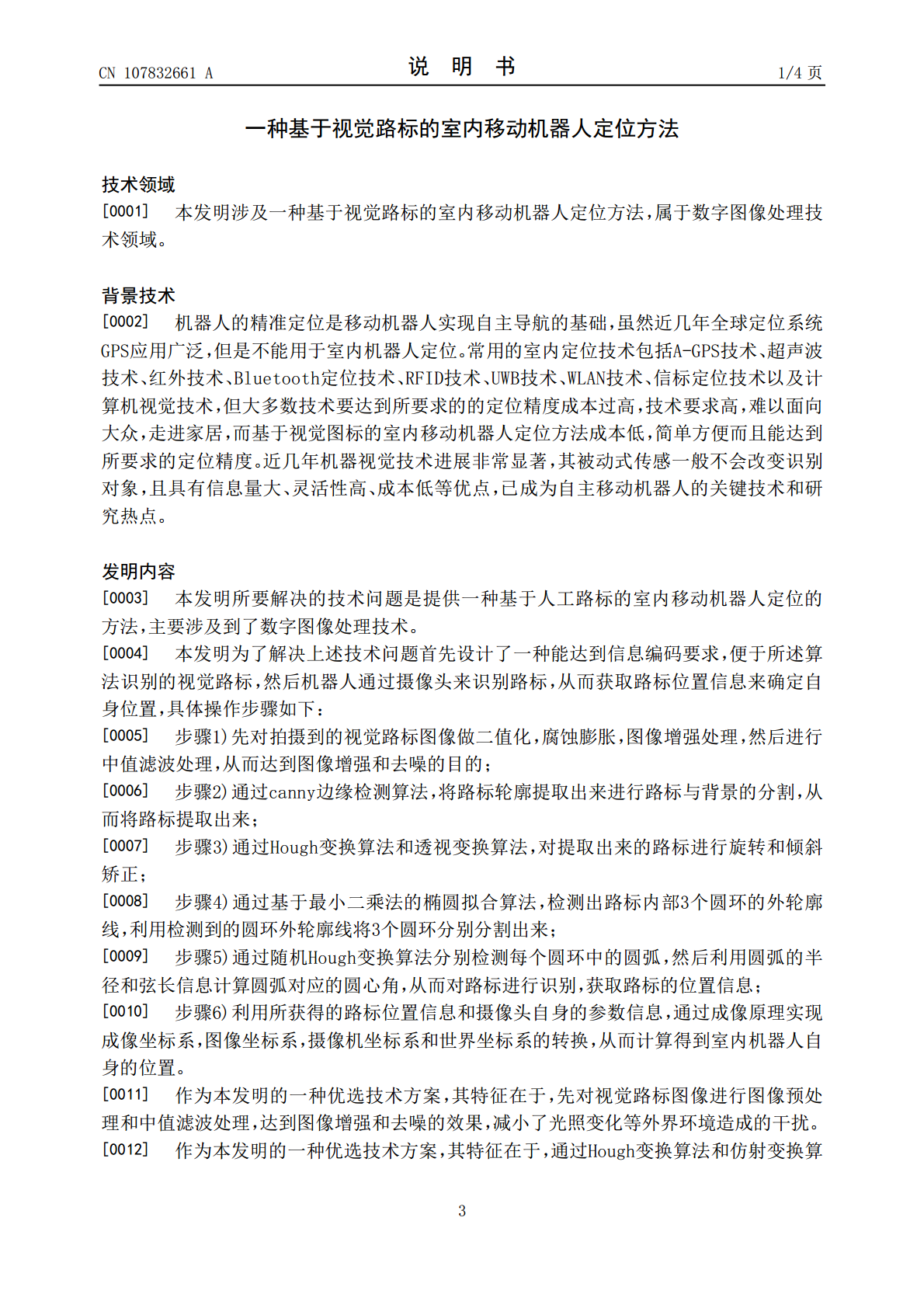
本发明公开了一种基于视觉路标的室内移动机器人定位方法,先对拍摄到的视觉路标图像做二值化,腐蚀膨胀,图像增强处理,然后进行中值滤波处理;通过canny边缘检测算法,将路标轮廓提取出来进行路标与背景的分割;通过Hough变换算法和透视变换算法,对提取出来的路标进行旋转和倾斜矫正;通过基于最小二乘法的椭圆拟合算法,检测出路标内部3个圆环的外轮廓线,利用检测到的圆环外轮廓线将3个圆环分别分割出来;通过随机Hough变换算法分别检测每个圆环中的圆弧,然后利用圆弧的半径和弦长信息计算圆弧对应的圆心角;利用所获得的路标

基于视觉的室内移动机器人定位方法研究.docx
基于视觉的室内移动机器人定位方法研究摘要:室内移动机器人是一种具有广泛潜力的机器人系统,在日常生活中的使用也越来越广泛。然而,机器人系统的定位是实现自主控制和导航的关键问题。因此,本文介绍了一种基于视觉的室内移动机器人定位方法,该方法通过处理机器人摄像头采集的视觉信息来实现机器人系统的定位。首先,本文介绍了机器人系统定位的一般方法,包括基于GPS、激光测距仪和惯性导航等。然后,介绍了基于视觉的室内移动机器人定位方法的思想和技术原理。主要步骤包括环境建模、机器人检测、特征提取和匹配。其中,环境建模是在机器人

基于天花板的室内移动机器人视觉定位方法.pdf
本发明公开了一种基于天花板的室内移动机器人视觉定位方法,该视觉定位方法以设定频率正面拍摄天花板照片,不断比对两张天花板照片中的特征直线和特征点,将比对结果转化成移动机器人在世界坐标系中的运动旋转角和运动位移增量,以此实现移动机器人的自我定位。本发明视觉定位方法以天花板作为参考目标,相比于其他物体,天花板不易被遮挡且照片里的元素较为单调,便于图像处理单元提取轮廓,分析照片;并且本发明视觉定位方法将摄像机的光轴垂直于天花板拍照,前后帧图像间的平移和旋转变换直接反应在二维照片中,简化图像分析中的计算。

基于视觉的室内移动机器人定位方法研究的任务书.docx
基于视觉的室内移动机器人定位方法研究的任务书任务书任务名称:基于视觉的室内移动机器人定位方法研究任务背景:随着机器人技术的不断发展和普及,室内移动机器人已经应用于许多领域,例如医疗、安保、清洁服务等。而机器人的定位技术是室内移动机器人实现智能服务的关键技术之一。现有的室内移动机器人定位方法中,激光雷达、超声波、惯性导航等传统方法具有精度高、实时性好等优点,但成本较高;而基于视觉实现的室内移动机器人定位方法成本相对较低,但受环境光线、场景复杂度等因素的影响,精度和鲁棒性有待提高。因此,开展基于视觉的室内移动

基于单目视觉的移动机器人室内定位.docx
基于单目视觉的移动机器人室内定位基于单目视觉的移动机器人室内定位摘要:随着移动机器人的发展和应用需求的增加,室内定位成为了一个重要的研究领域。传统的室内定位方法多依赖于全球定位系统(GPS)等外部设备,但在室内环境下,GPS信号的弱化和多径效应的影响使得导航定位困难。因此,基于单目视觉的室内定位技术得到了广泛的研究和应用。本文将对基于单目视觉的移动机器人室内定位进行探讨,介绍其原理、方法和应用。关键词:移动机器人、室内定位、单目视觉、原理、方法、应用1.引言随着科技的进步,移动机器人逐渐走入人们的日常生活