
光伏清扫设备及其控制方法.pdf

康平****ng

1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
光伏清扫设备及其控制方法.pdf
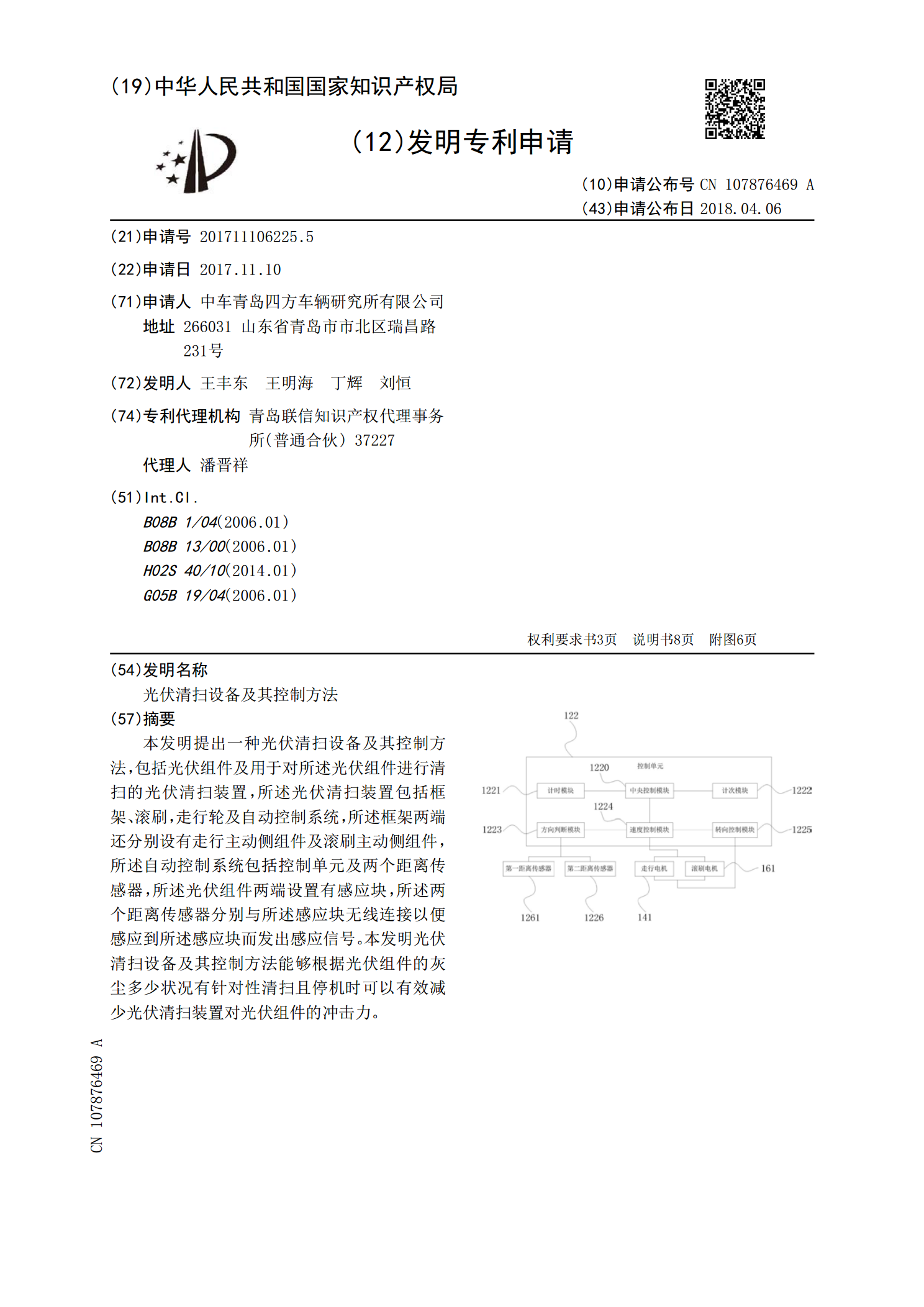
本发明提出一种光伏清扫设备及其控制方法,包括光伏组件及用于对所述光伏组件进行清扫的光伏清扫装置,所述光伏清扫装置包括框架、滚刷,走行轮及自动控制系统,所述框架两端还分别设有走行主动侧组件及滚刷主动侧组件,所述自动控制系统包括控制单元及两个距离传感器,所述光伏组件两端设置有感应块,所述两个距离传感器分别与所述感应块无线连接以便感应到所述感应块而发出感应信号。本发明光伏清扫设备及其控制方法能够根据光伏组件的灰尘多少状况有针对性清扫且停机时可以有效减少光伏清扫装置对光伏组件的冲击力。

光伏清扫设备及其控制方法.pdf
本发明提出一种光伏清扫设备及其控制方法,包括光伏组件及用于对所述光伏组件进行清扫的光伏清扫装置,所述光伏清扫装置包括框架、滚刷,走行轮及自动控制系统,所述框架两端还分别设有走行主动侧组件及滚刷主动侧组件,所述自动控制系统包括控制单元及两个距离传感器,所述光伏组件两端设置有感应块,所述两个距离传感器分别与所述感应块无线连接以便感应到感应块而发出感应信号。本发明光伏清扫设备及其控制方法能够依次减慢和停止所述走行轮的速度以防止由于惯性作用导致的所述光伏清扫装置在较高速状态下停机后与所述光伏组件上的感应块发生撞击
光伏清扫装置的状态检测方法、控制器及光伏清扫装置.pdf
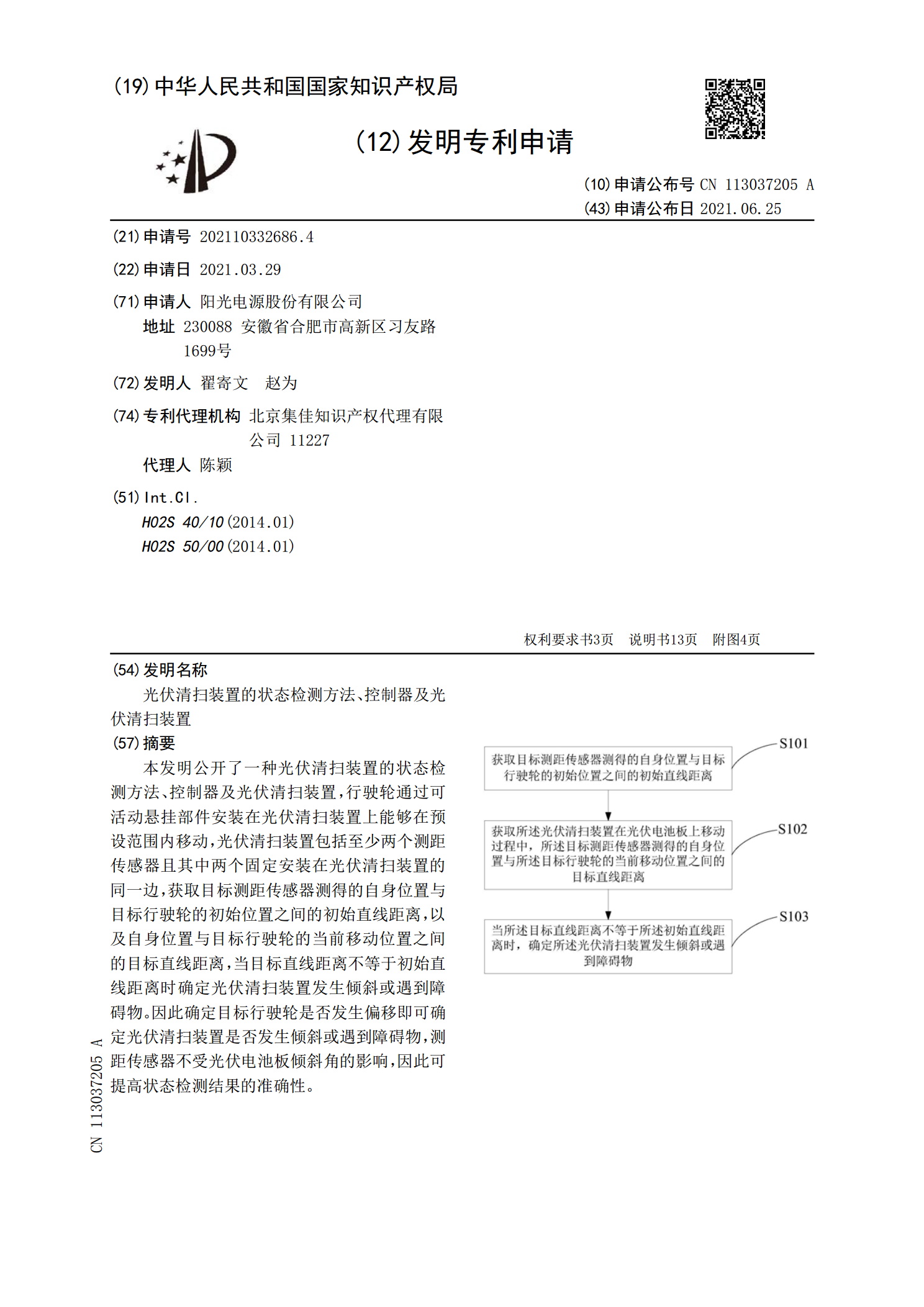
本发明公开了一种光伏清扫装置的状态检测方法、控制器及光伏清扫装置,行驶轮通过可活动悬挂部件安装在光伏清扫装置上能够在预设范围内移动,光伏清扫装置包括至少两个测距传感器且其中两个固定安装在光伏清扫装置的同一边,获取目标测距传感器测得的自身位置与目标行驶轮的初始位置之间的初始直线距离,以及自身位置与目标行驶轮的当前移动位置之间的目标直线距离,当目标直线距离不等于初始直线距离时确定光伏清扫装置发生倾斜或遇到障碍物。因此确定目标行驶轮是否发生偏移即可确定光伏清扫装置是否发生倾斜或遇到障碍物,测距传感器不受光伏电池
光伏板清扫设备.pdf
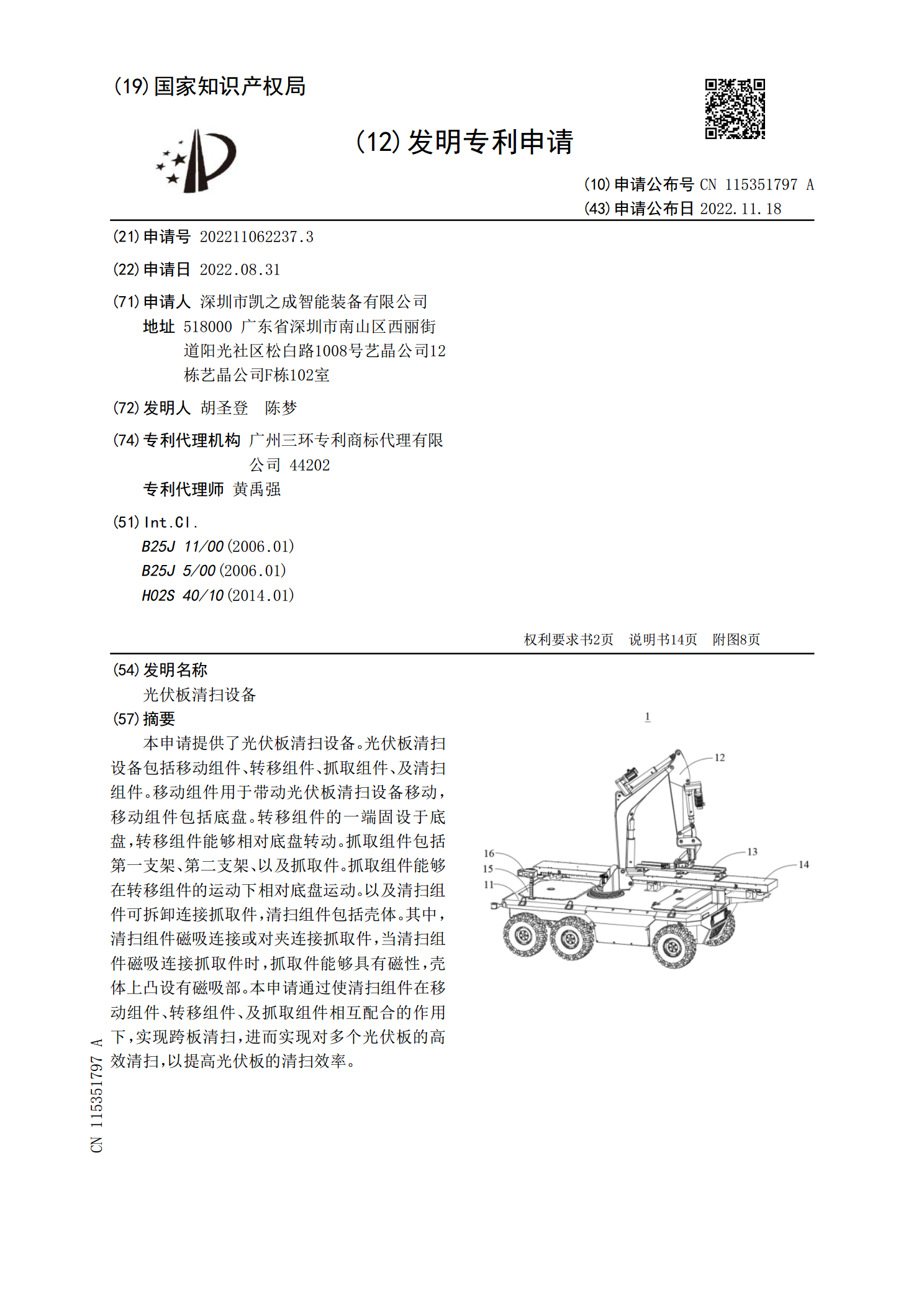
本申请提供了光伏板清扫设备。光伏板清扫设备包括移动组件、转移组件、抓取组件、及清扫组件。移动组件用于带动光伏板清扫设备移动,移动组件包括底盘。转移组件的一端固设于底盘,转移组件能够相对底盘转动。抓取组件包括第一支架、第二支架、以及抓取件。抓取组件能够在转移组件的运动下相对底盘运动。以及清扫组件可拆卸连接抓取件,清扫组件包括壳体。其中,清扫组件磁吸连接或对夹连接抓取件,当清扫组件磁吸连接抓取件时,抓取件能够具有磁性,壳体上凸设有磁吸部。本申请通过使清扫组件在移动组件、转移组件、及抓取组件相互配合的作用下,实

一种光伏组件的清扫机构及其控制方法.pdf
本发明公开了一种光伏组件的清扫机构及其控制方法,本发明中支架体设置有活动支腿,当清扫机器人需要跨组串移动时,活动支腿的自由端支撑于光伏板的相应位置,支架体相对活动支腿前伸至下一排光伏组串的上方后,再通过前支腿和后支腿支撑于该工位,因活动支腿上设置有搭载清扫机器人的搭载装置,清扫机器人存放至搭载装置,随活动支腿一起沿支架体移动至下一排光伏组串的上方,然后再从搭载装置转移至该排的光伏组串的光伏板,从而实现了清扫机器人的跨组串移动,通过该清扫机构能够实现清扫机器人对所有光伏组串的自动清扫,提高清扫效率。