
一种车轮滑转率的获取方法、装置、控制器及电动汽车.pdf

邻家****ng


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车轮滑转率的获取方法、装置、控制器及电动汽车.pdf
本发明提供一种车轮滑转率的获取方法、装置、控制器及电动汽车,涉及整车控制技术领域,所述获取方法包括:获取电动汽车上车轮的纵向速度、车轮的侧向速度和车轮转速;根据所述纵向速度、所述侧向速度和所述车轮转速,获取车轮滑转率。本发明的方案通过对车速估计值进行反馈修正,提高了车速估计的精度,从而实现了精确获取车轮滑转率,提高了车轮滑转状态判断的精度,降低了系统成本。
车辆车轮瞬时滑转率的获取方法、控制方法、系统、装置.pdf
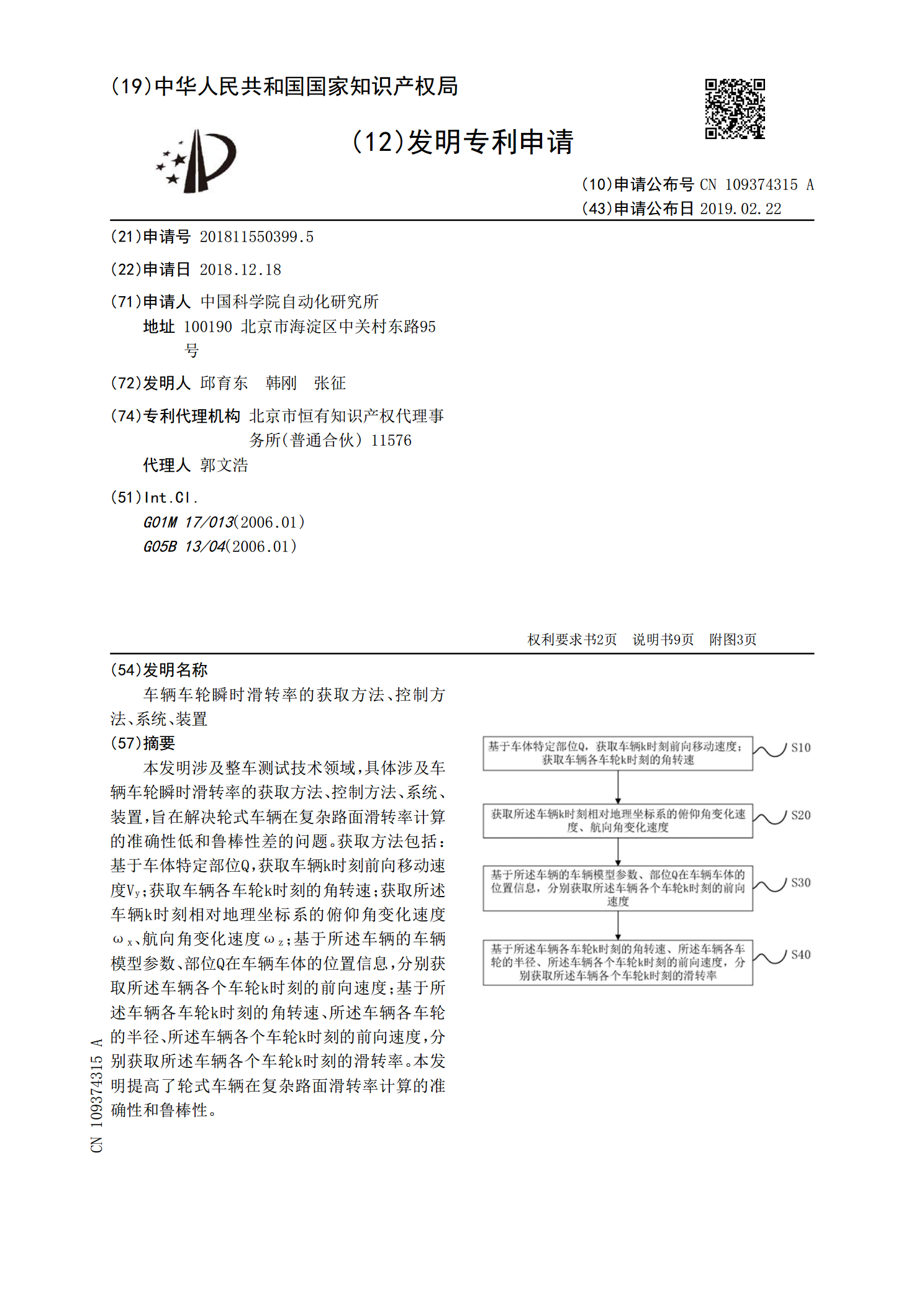
本发明涉及整车测试技术领域,具体涉及车辆车轮瞬时滑转率的获取方法、控制方法、系统、装置,旨在解决轮式车辆在复杂路面滑转率计算的准确性低和鲁棒性差的问题。获取方法包括:基于车体特定部位Q,获取车辆k时刻前向移动速度V

一种基于车辙信息的车轮滑转率和侧偏角测量方法.pdf
一种基于车辙信息的车轮滑转率和侧偏角测量方法,涉及车轮滑转率和侧偏角的测量方法,尤其涉及一种基于车辙信息的车轮滑转率和侧偏角测量方法。本发明是要解决现有的测量星球探测车车轮滑转率和侧偏角的方法,被动轮法存在外力干扰而测不准的问题和视觉里程计法无法直接观测单个车轮滑转的问题。本发明方法通过以下步骤进行:一、确定车辙与车轮滑转率和侧偏角的关系;二、建立车轮侧偏角测量模型;三、建立车轮滑转率测量模型。本发明解决了被动轮法存在外力干扰而测不准的问题和视觉里程计法无法直接观测单个车轮滑转的问题,具有速度快、精度高、

防止停驶车辆的车轮滑转的方法.pdf
本发明涉及防止停驶车辆的车轮滑转的方法。一种方法,其包括:将制动力施加到机动车辆的所有四个车轮以停止车辆,同时继续将扭矩施加到车辆的从动轮;以及当阻止或几乎阻止车辆在正方向上移动时,通过减小所施加的扭矩防止从动轮的车轮滑移。以这种方式,能够防止或修正由于施加到光滑表面上的从动轮的蠕变扭矩所致的车辆的无意横向移动。

基于多源数据结构融合的车轮滑转率测量方法.pptx
基于多源数据结构融合的车轮滑转率测量方法目录添加目录项标题多源数据结构融合数据来源及类型数据融合算法融合效果评估融合优势分析车轮滑转率测量方法滑转率定义及重要性传统滑转率测量方法基于多源数据结构融合的测量方法测量方法验证与比较实验设计与结果分析实验场景与条件数据采集与处理实验结果展示结果分析方法与结论应用前景与展望在线监测与控制应用安全性能提升应用节能减排应用技术发展与展望感谢观看