
基于轮廓波集成DBN的极化SAR图像变化检测方法.pdf

雨巷****碧易

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于轮廓波集成DBN的极化SAR图像变化检测方法.pdf
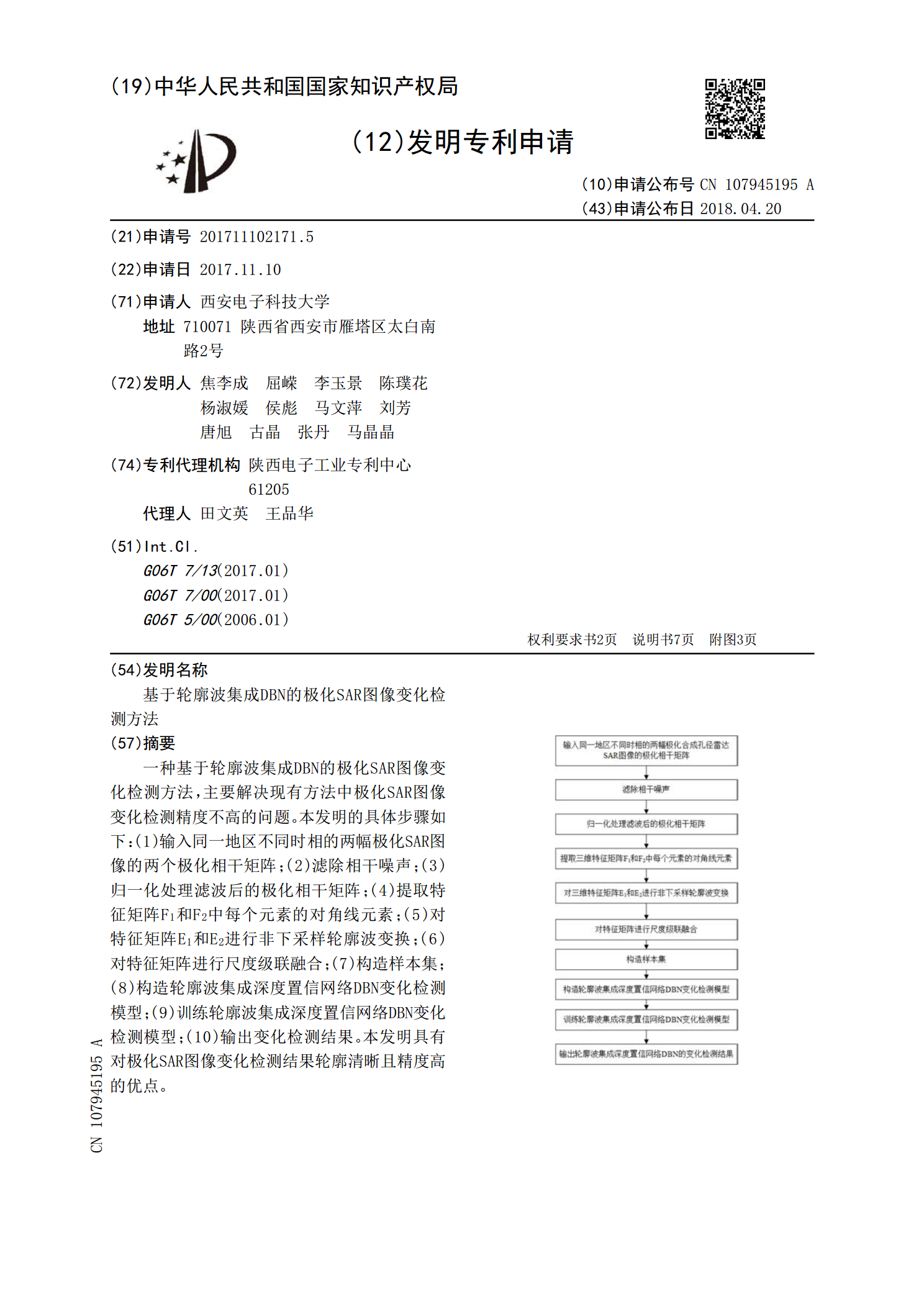
一种基于轮廓波集成DBN的极化SAR图像变化检测方法,主要解决现有方法中极化SAR图像变化检测精度不高的问题。本发明的具体步骤如下:(1)输入同一地区不同时相的两幅极化SAR图像的两个极化相干矩阵;(2)滤除相干噪声;(3)归一化处理滤波后的极化相干矩阵;(4)提取特征矩阵F
基于轮廓波BSPP网络的SAR图像变化检测方法.pdf
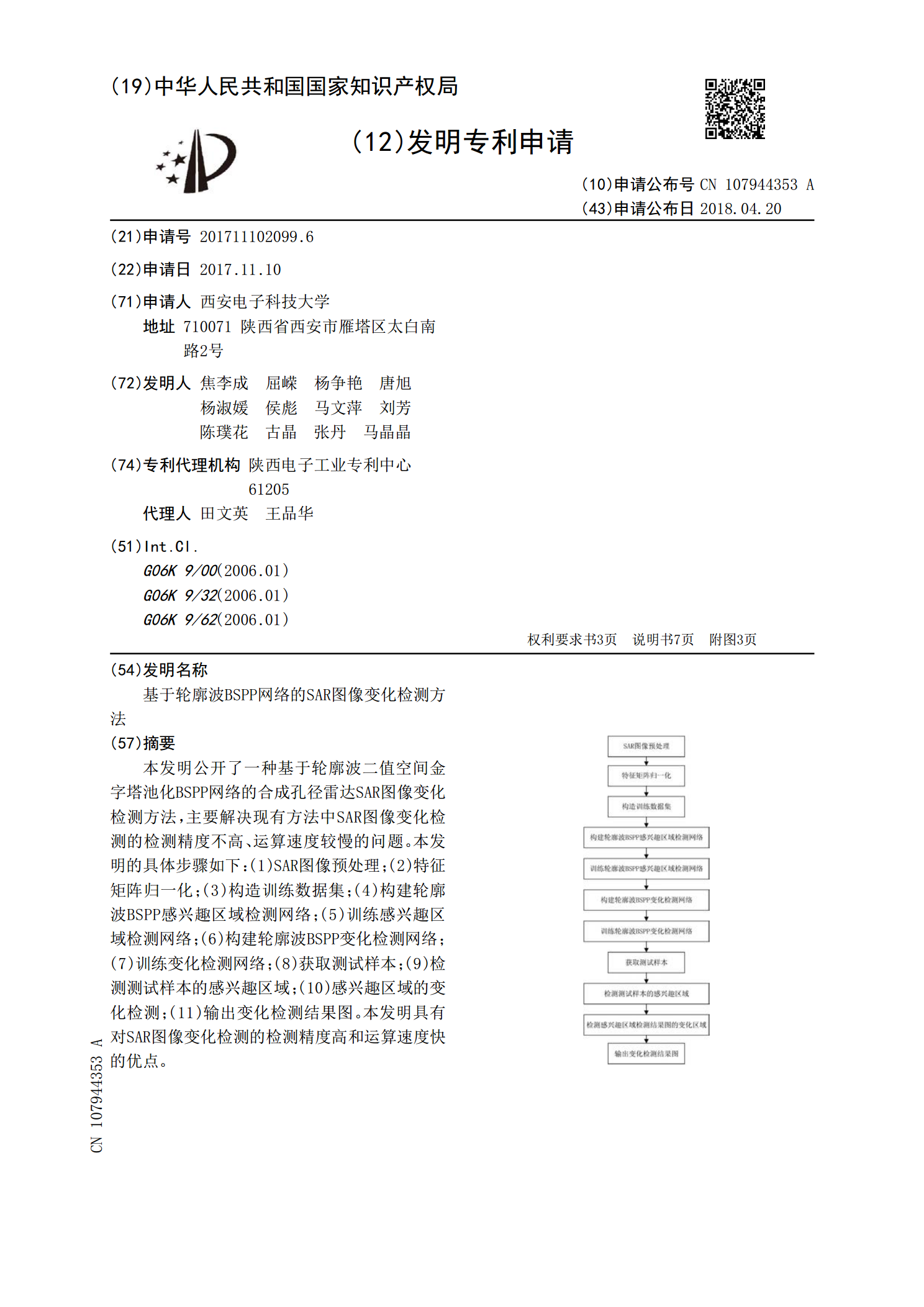
本发明公开了一种基于轮廓波二值空间金字塔池化BSPP网络的合成孔径雷达SAR图像变化检测方法,主要解决现有方法中SAR图像变化检测的检测精度不高、运算速度较慢的问题。本发明的具体步骤如下:(1)SAR图像预处理;(2)特征矩阵归一化;(3)构造训练数据集;(4)构建轮廓波BSPP感兴趣区域检测网络;(5)训练感兴趣区域检测网络;(6)构建轮廓波BSPP变化检测网络;(7)训练变化检测网络;(8)获取测试样本;(9)检测测试样本的感兴趣区域;(10)感兴趣区域的变化检测;(11)输出变化检测结果图。本发明具

基于轮廓波变换的SAR图像变化检测差异图生成方法.pdf
本发明公开一种基于轮廓波变换的SAR图像变化检测差异图生成方法。实现过程主要包括:先对两幅经预处理的不同时间相同地域的SAR图像构造对数比值图像和均值比值图像;用Contourlet变换处理使其生成对应的Contourlet系数;依不同融合规则分别对两幅图像系数分高频和低频进行计算;对融合后的Contourlet系数进行逆Contourlet变换生成变化差异图。本发明利用均值比值图像和对数比值图像分别提取其高频和低频的不同特点,基于Contourlet变换的图像融合充分利用了各源图像互补信息,使SAR图像
基于复数轮廓波卷积神经网络的极化SAR图像分类方法.pdf
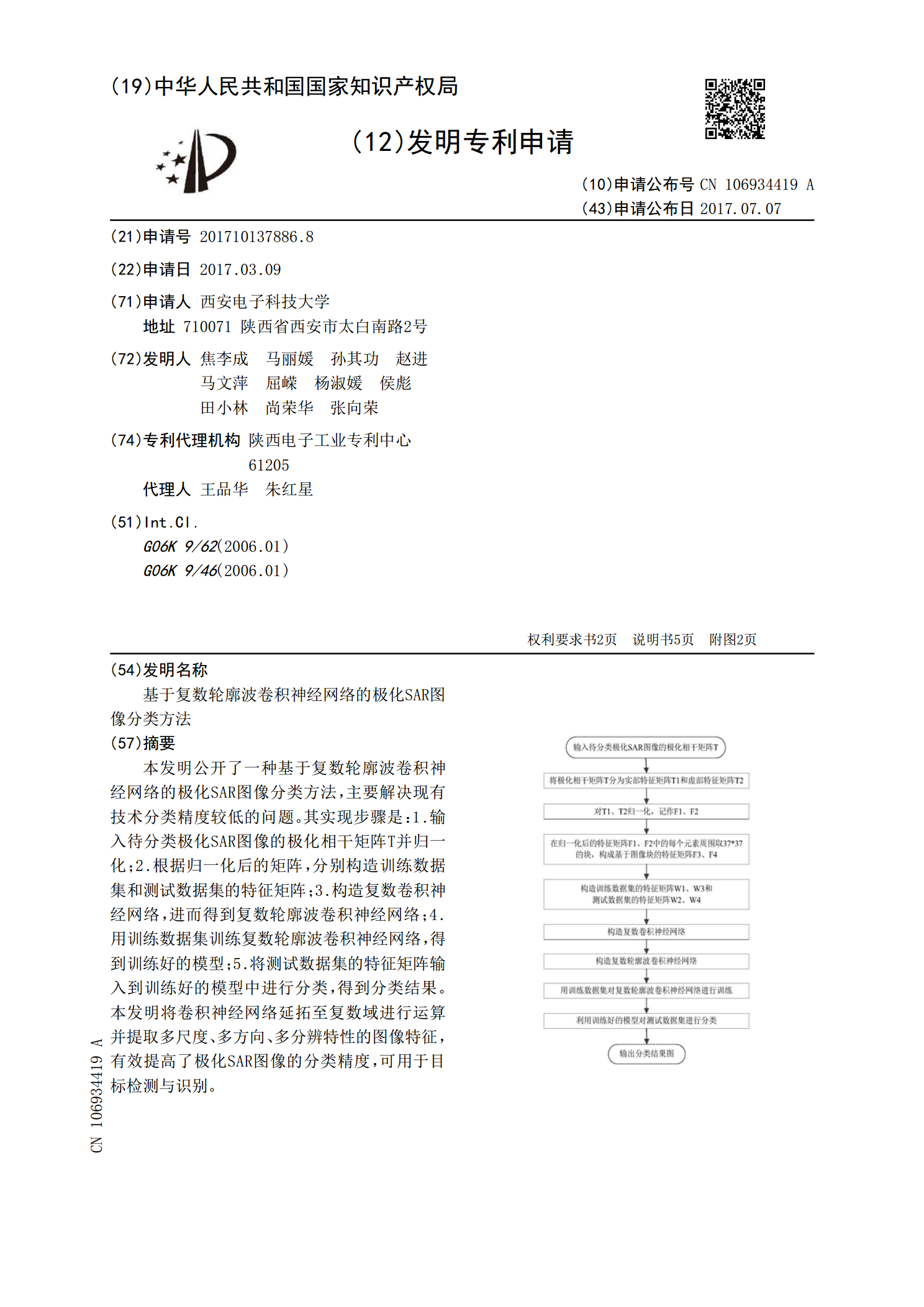
本发明公开了一种基于复数轮廓波卷积神经网络的极化SAR图像分类方法,主要解决现有技术分类精度较低的问题。其实现步骤是:1.输入待分类极化SAR图像的极化相干矩阵T并归一化;2.根据归一化后的矩阵,分别构造训练数据集和测试数据集的特征矩阵;3.构造复数卷积神经网络,进而得到复数轮廓波卷积神经网络;4.用训练数据集训练复数轮廓波卷积神经网络,得到训练好的模型;5.将测试数据集的特征矩阵输入到训练好的模型中进行分类,得到分类结果。本发明将卷积神经网络延拓至复数域进行运算并提取多尺度、多方向、多分辨特性的图像特征

一种基于非下采样轮廓波DCGAN的极化SAR图像分类方法.pdf
本发明公开了一种基于非下采样轮廓波DCGAN的极化SAR图像分类方法,输入待分类的极化SAR图像进行Pauli分解;用归一化后的数据集取32×32的块构成基于图像块的数据集;构造无标签训练数据集、有标签训练数据集和测试数据集,利用SLIC超像素算法对Pauli分解后的伪彩图划分超像素块,构造非下采样轮廓波DCGAN,用无标签训练数据集对训练网络模型非下采样轮廓波DCGAN进行训练;再用有标签训练数据集输入判别分类网络模型训练softmax分类器,再微调整个判别分类网络的参数;利用训练好的判别分类网络模型对