
基于深度增强学习的等切削力齿轮加工方法.pdf

桂香****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度增强学习的等切削力齿轮加工方法.pdf
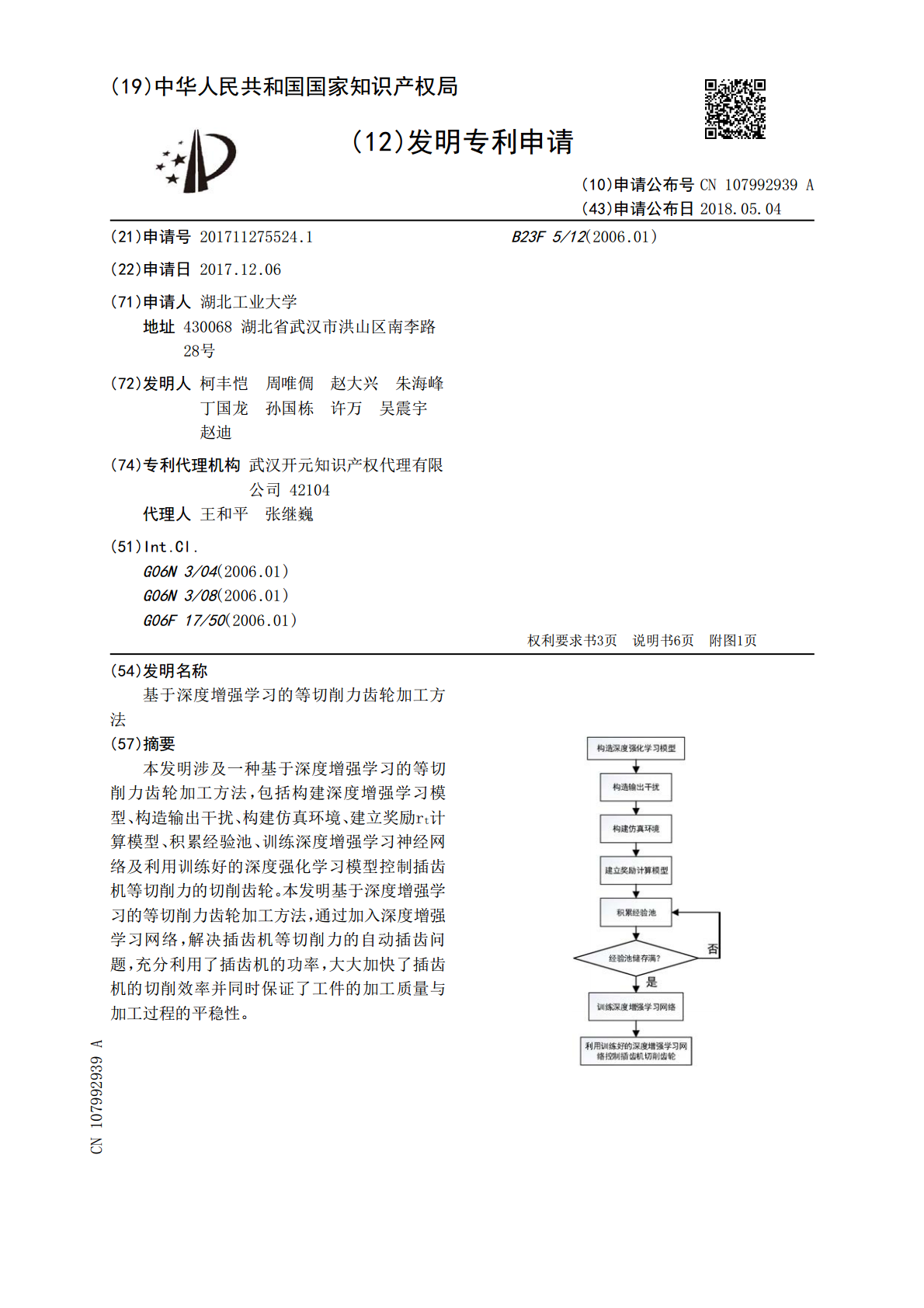
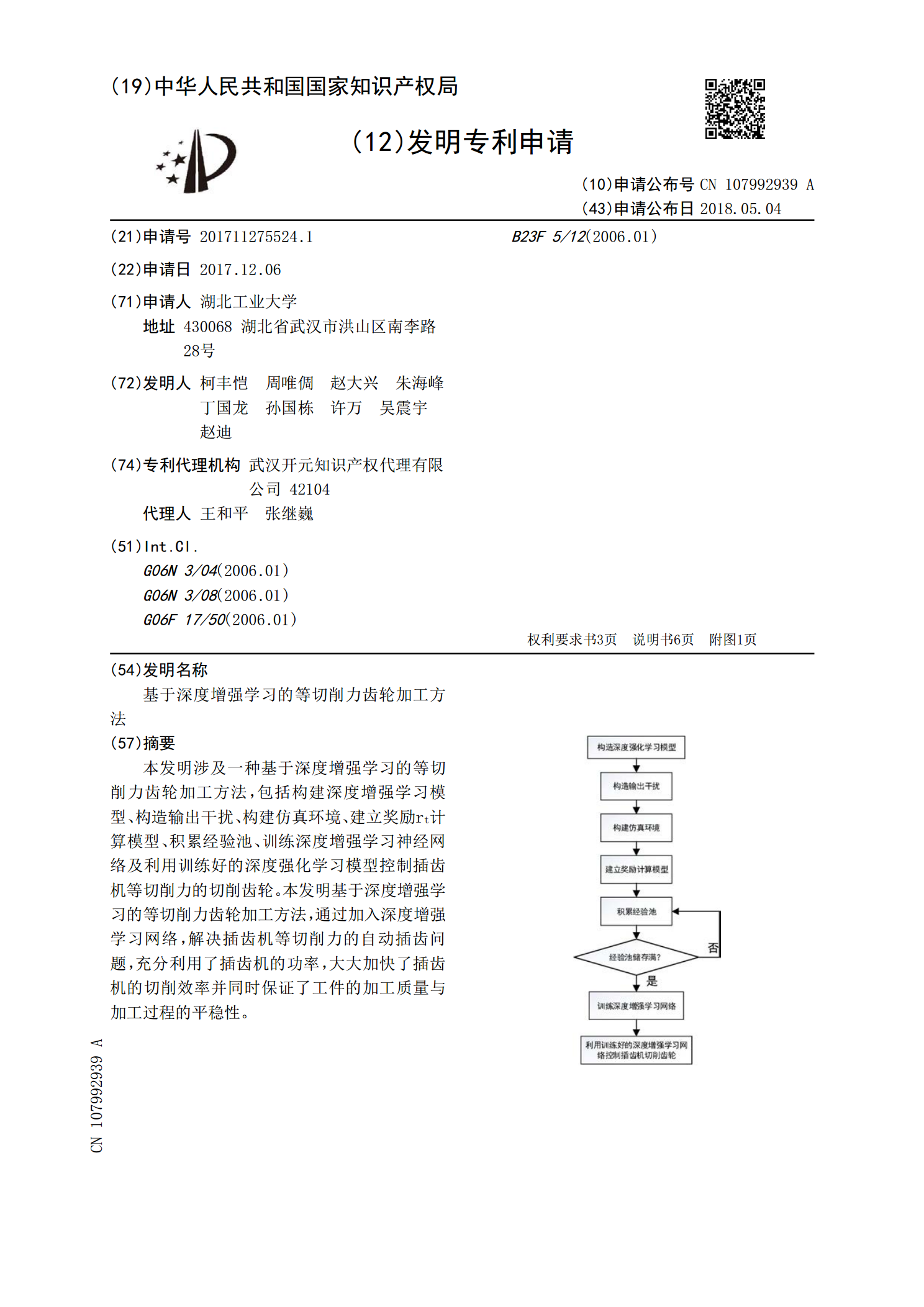
本发明涉及一种基于深度增强学习的等切削力齿轮加工方法,包括构建深度增强学习模型、构造输出干扰、构建仿真环境、建立奖励r
圆柱齿轮插齿加工切削力预测的方法.pdf
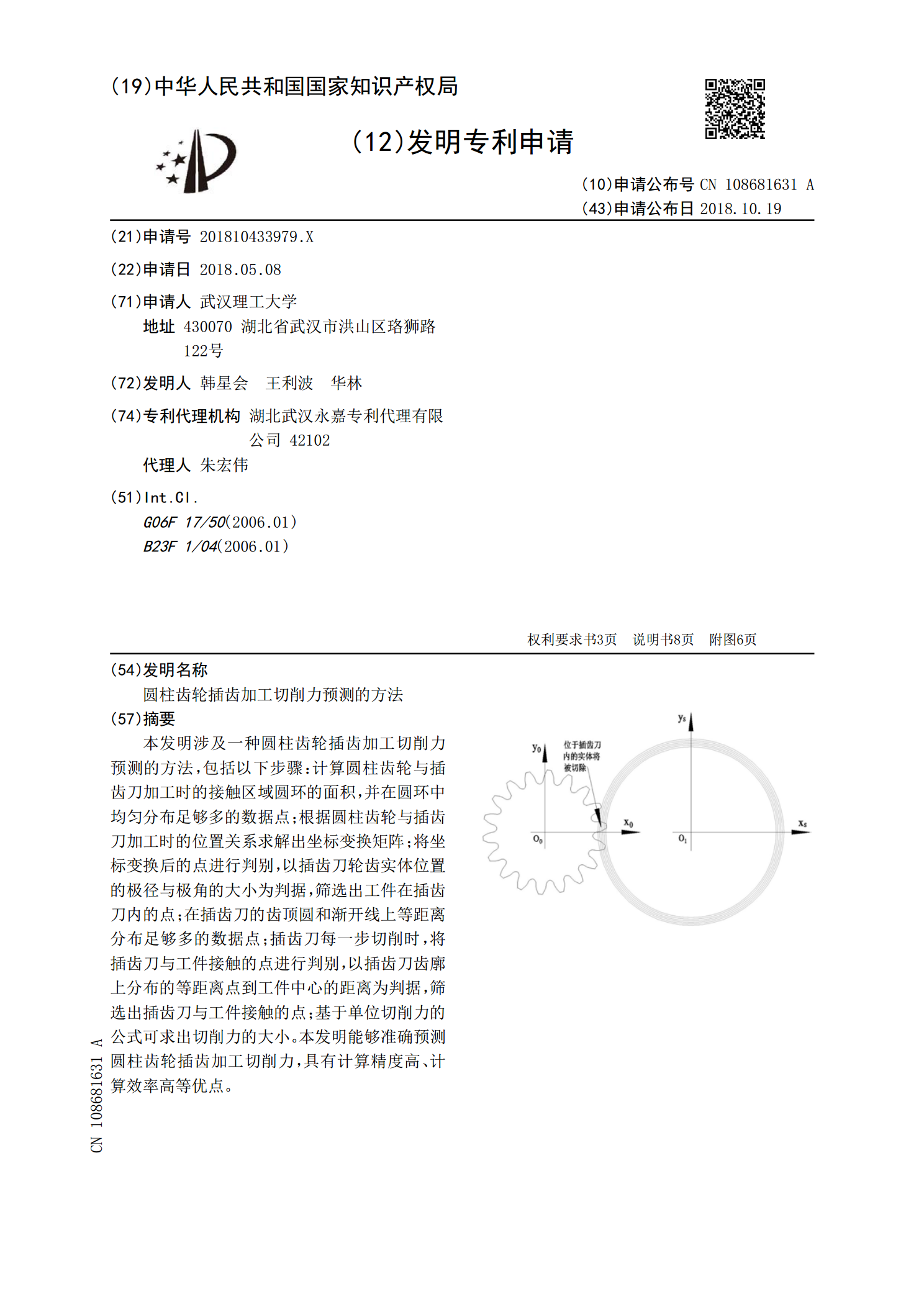
本发明涉及一种圆柱齿轮插齿加工切削力预测的方法,包括以下步骤:计算圆柱齿轮与插齿刀加工时的接触区域圆环的面积,并在圆环中均匀分布足够多的数据点;根据圆柱齿轮与插齿刀加工时的位置关系求解出坐标变换矩阵;将坐标变换后的点进行判别,以插齿刀轮齿实体位置的极径与极角的大小为判据,筛选出工件在插齿刀内的点;在插齿刀的齿顶圆和渐开线上等距离分布足够多的数据点;插齿刀每一步切削时,将插齿刀与工件接触的点进行判别,以插齿刀齿廓上分布的等距离点到工件中心的距离为判据,筛选出插齿刀与工件接触的点;基于单位切削力的公式可求出切

确定齿轮加工切削深度的方法.pdf
本发明公开了一种确定齿轮加工切削深度的方法,包括如下步骤:(1)计算待加工齿轮需切除的总面积S;(2)计算累计切削深度与标准深度H相差h时去除齿轮毛坯的总面积S

基于深度学习的RGBD图像增强方法研究的开题报告.docx
基于深度学习的RGBD图像增强方法研究的开题报告一、研究背景及意义RGBD图像由RGB信息和深度信息组成,能够更加准确地表示物体在三维空间中的位置、形状和纹理等特征,因而在计算机视觉和机器人等领域有着广泛应用。然而,在实际使用中,RGBD图像采集设备的性能和环境条件等因素会影响图像质量和信息量,给后续的处理和分析带来困难。因此,如何提高RGBD图像的质量和增强图像中的信息,一直是学术界和工业界的研究重点。本文将基于深度学习技术,探讨RGBD图像增强的方法和应用。二、国内外研究现状近年来,深度学习在图像增强
基于集成学习增强型齿轮单故障类别诊断方法.pdf
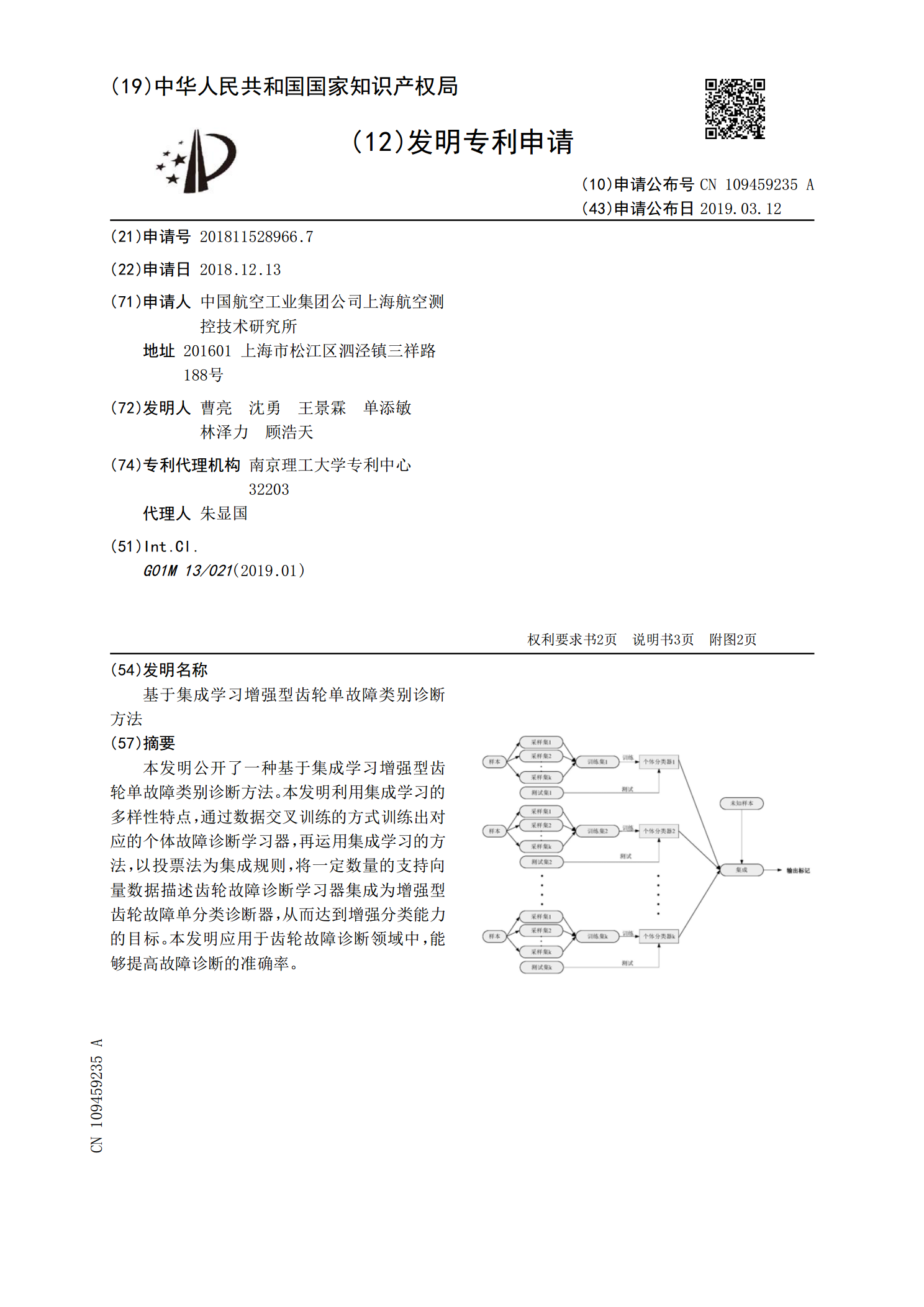
本发明公开了一种基于集成学习增强型齿轮单故障类别诊断方法。本发明利用集成学习的多样性特点,通过数据交叉训练的方式训练出对应的个体故障诊断学习器,再运用集成学习的方法,以投票法为集成规则,将一定数量的支持向量数据描述齿轮故障诊断学习器集成为增强型齿轮故障单分类诊断器,从而达到增强分类能力的目标。本发明应用于齿轮故障诊断领域中,能够提高故障诊断的准确率。