
基于集成学习增强型齿轮单故障类别诊断方法.pdf

运升****魔王


1/8

2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于集成学习增强型齿轮单故障类别诊断方法.pdf
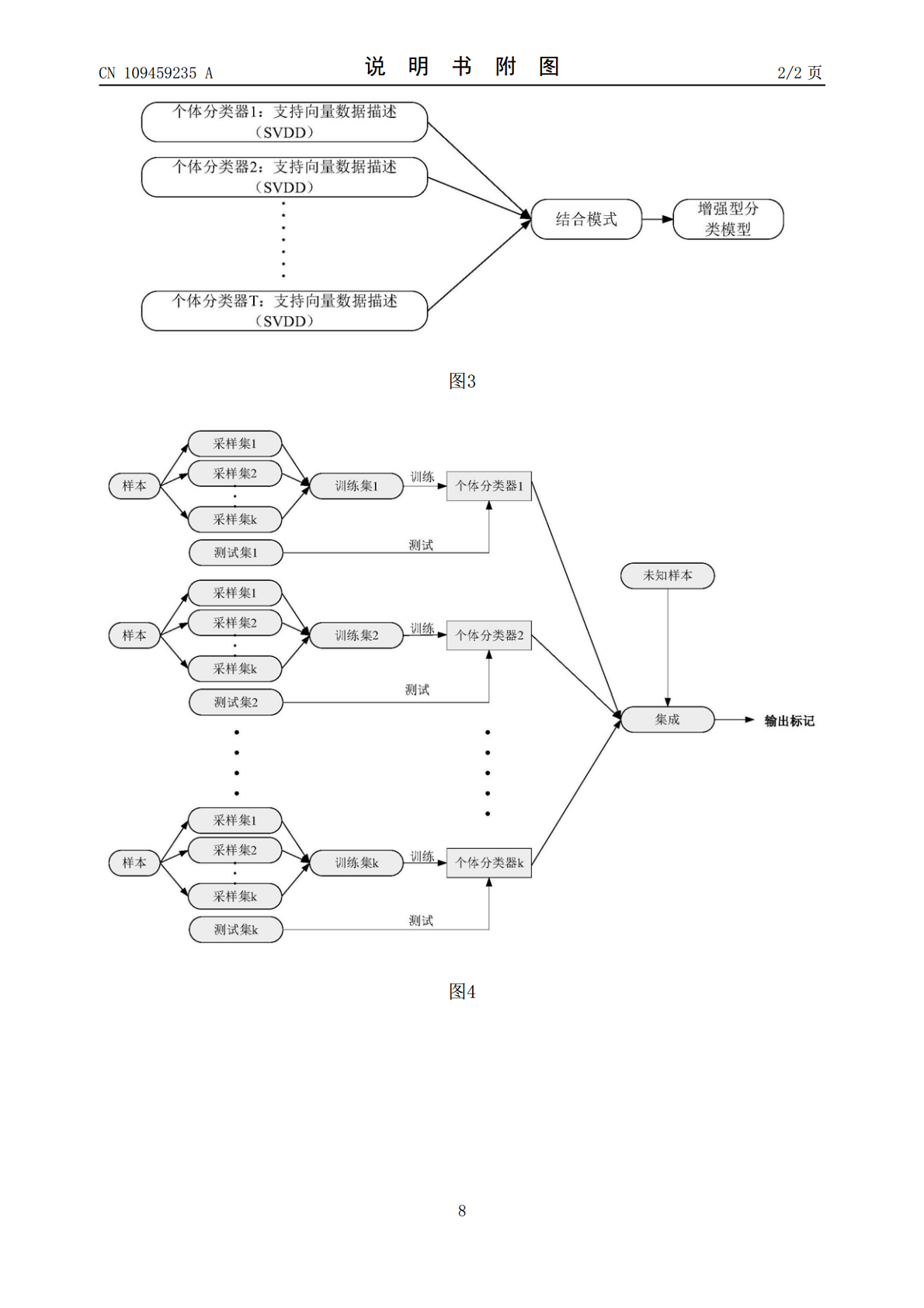
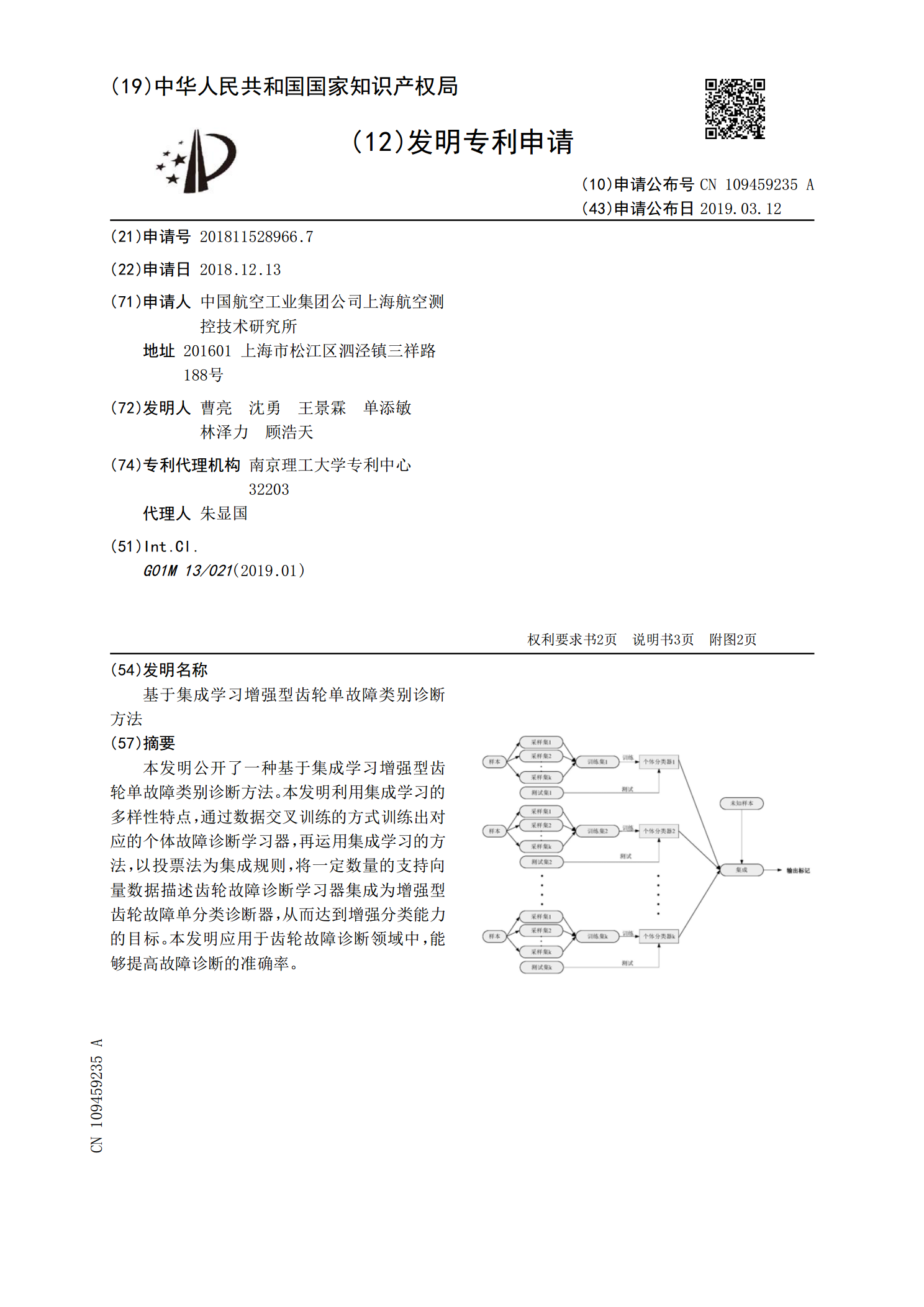
本发明公开了一种基于集成学习增强型齿轮单故障类别诊断方法。本发明利用集成学习的多样性特点,通过数据交叉训练的方式训练出对应的个体故障诊断学习器,再运用集成学习的方法,以投票法为集成规则,将一定数量的支持向量数据描述齿轮故障诊断学习器集成为增强型齿轮故障单分类诊断器,从而达到增强分类能力的目标。本发明应用于齿轮故障诊断领域中,能够提高故障诊断的准确率。

基于集成学习的故障诊断方法研究.docx
基于集成学习的故障诊断方法研究摘要:故障诊断是工业生产中的关键技术之一,其准确性和速度对生产效率及质量的保障至关重要。传统故障诊断方法受制于单一算法的局限性,导致难以充分发挥数据的价值。集成学习作为一种有效的综合多种算法思想的方法,正逐渐被运用于故障诊断领域。本文将介绍集成学习在故障诊断中的应用,重点探讨不同集成学习算法的选择、融合以及模型评估等方面。关键词:故障诊断;集成学习;算法融合;模型评估一、引言在工业生产中,设备故障不可避免,而故障的快速发现和准确诊断则显得尤为重要。故障诊断是指通过对设备运行状
基于集成学习算法的轴承故障诊断方法研究.pptx
汇报人:CONTENTSPARTONEPARTTWO集成学习算法的定义和原理集成学习算法的常见类型集成学习算法的优势和适用场景PARTTHREE轴承故障诊断的重要性和难点基于振动信号分析的故障诊断方法基于声音信号分析的故障诊断方法基于温度信号分析的故障诊断方法PARTFOUR数据预处理和特征提取集成学习算法的选择和参数优化模型训练和验证模型评估和性能指标PARTFIVE实验数据来源和实验环境介绍实验结果展示和对比分析模型性能改进和优化建议实验结论和未来研究方向PARTSIX在工业生产中的应用前景在实际应用

基于集成学习的故障诊断方法研究的任务书.docx
基于集成学习的故障诊断方法研究的任务书一、研究背景和意义随着工业化、信息化的深入发展,自动化设备和系统越来越广泛应用于生产和生活中。然而随之而来的故障风险也随之增高。针对设备和系统故障快速、准确地进行诊断和定位,是保证生产运行的重要保障。传统的故障诊断方法往往需要人工分析判断,需要大量的时间和人力成本,并且有时难以达到较高的诊断准确性。因此,开展基于集成学习的故障诊断方法研究,具有重要的理论和实践意义。二、研究内容本次研究旨在针对自动化设备和系统的故障诊断问题,探索基于集成学习的故障诊断方法,具体内容包括

基于集成学习方法的改进FDA流程工业故障诊断方法.pdf
本发明公开了一种基于集成学习方法的改进FDA流程工业故障诊断方法,对数据进行动态化处理后,数据间充分保留了工业流程的时序关联性以及更多有用信息,便于L2范数归一化的FDA方法进行特征提取。本发明提供的技术方案在集成学习方法的作用下,综合故障诊断模型建立时间缩短,提高了故障诊断效率。通过实验仿真结果来看,与未进行动态化处理以及基于贝叶斯方法的故障诊断模型相比,本发明提供的技术方案具有显著优势。