
一种基于有人机无人化改装的前轮转向操纵机构.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于有人机无人化改装的前轮转向操纵机构.pdf
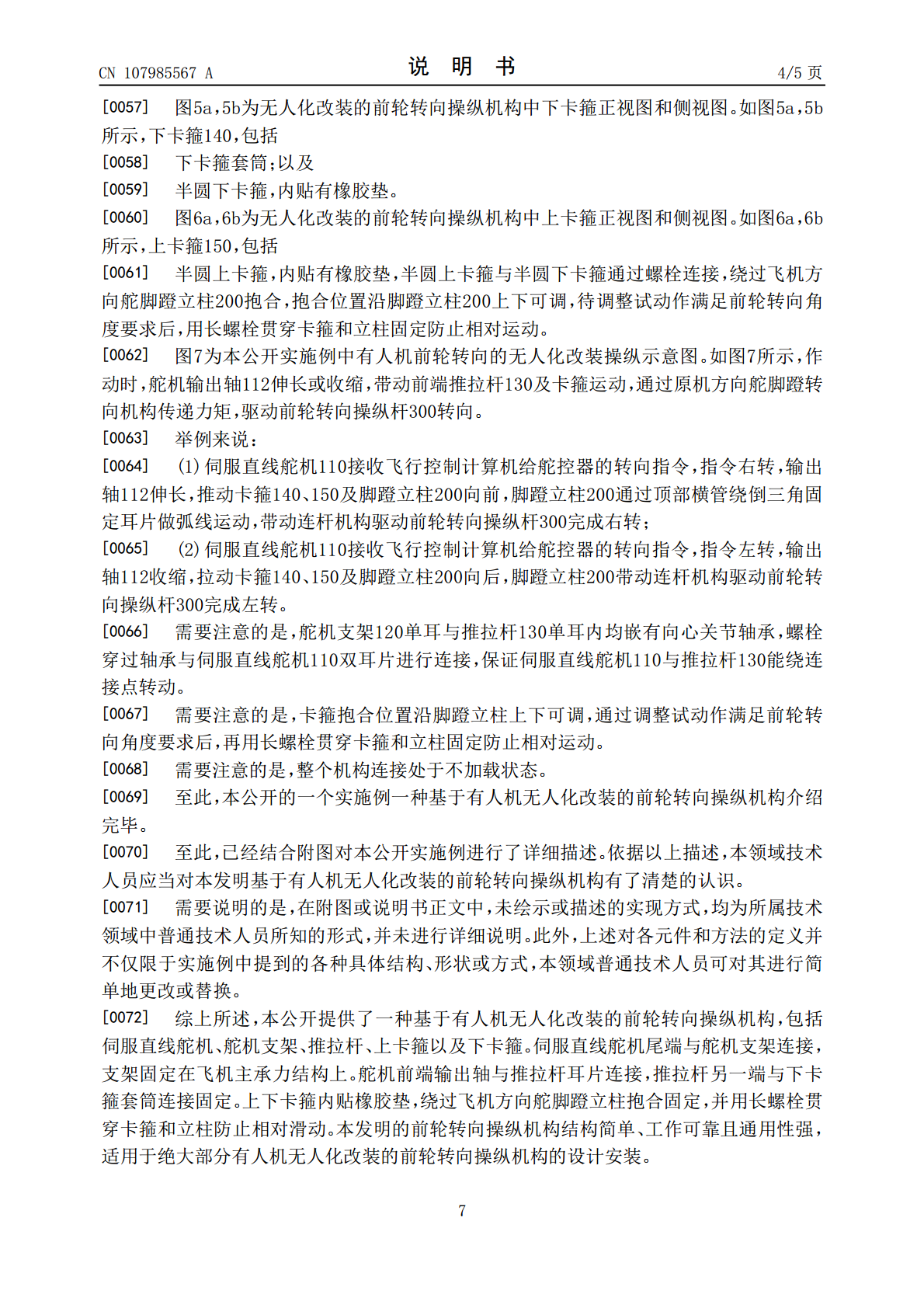
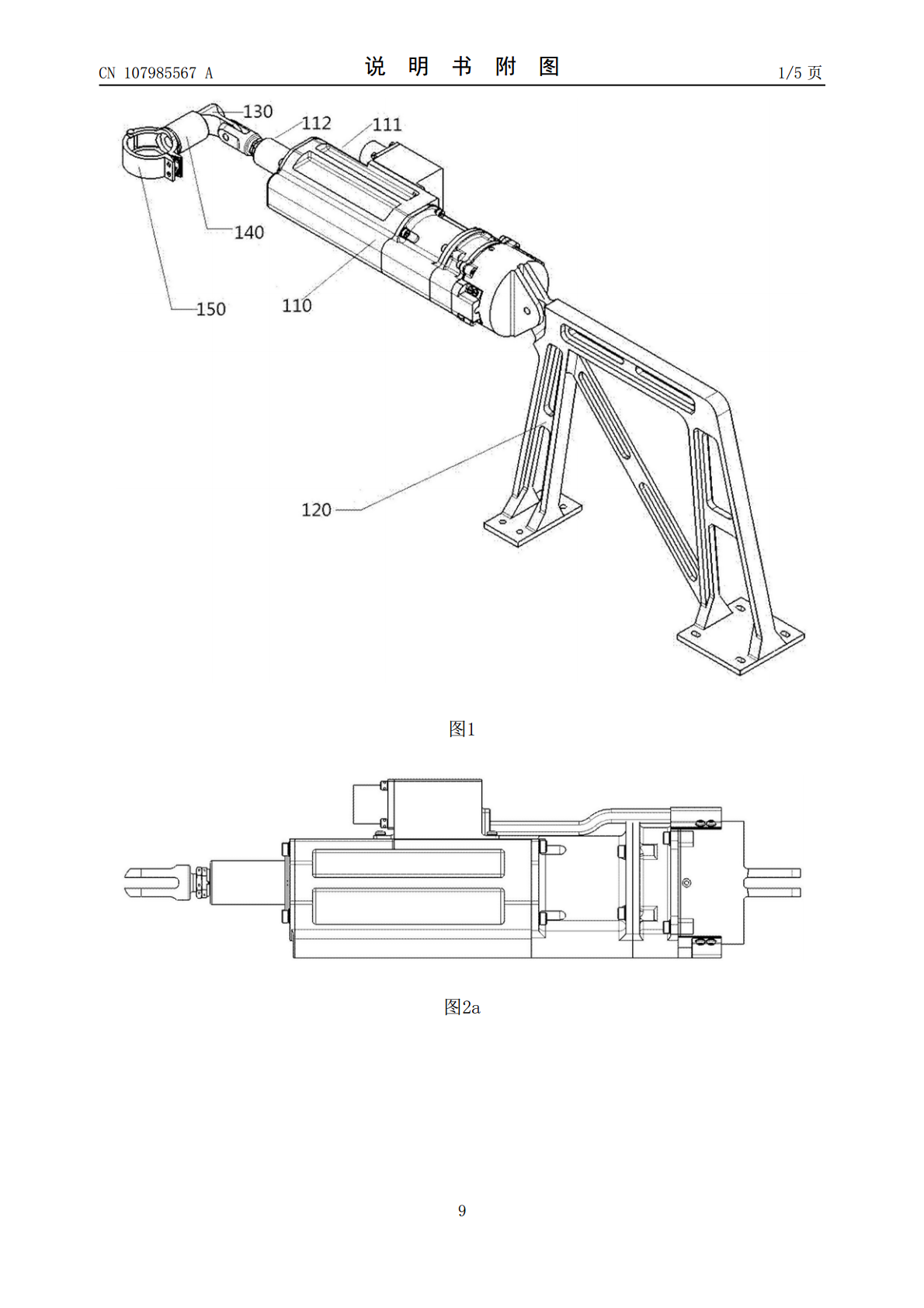
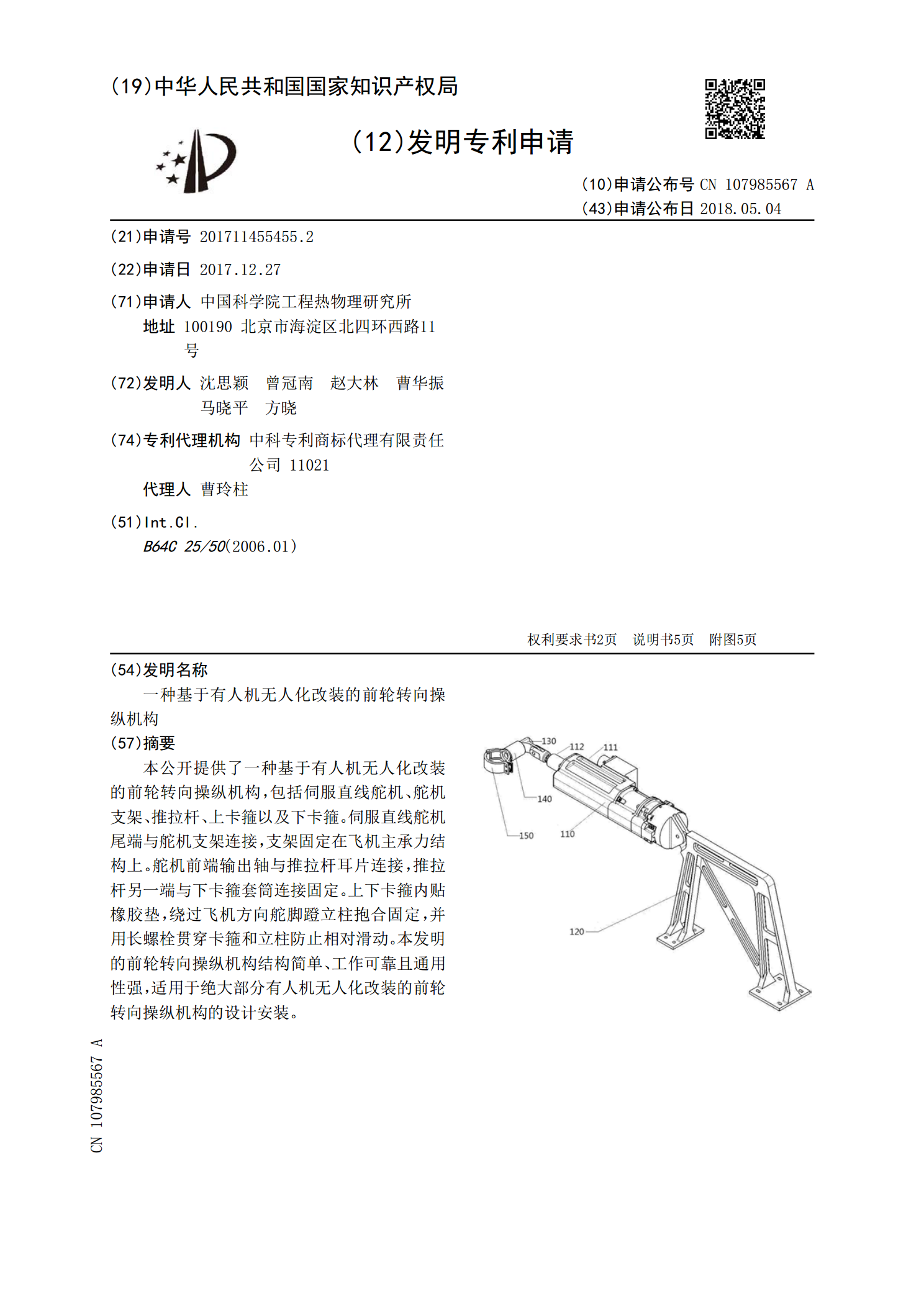
本公开提供了一种基于有人机无人化改装的前轮转向操纵机构,包括伺服直线舵机、舵机支架、推拉杆、上卡箍以及下卡箍。伺服直线舵机尾端与舵机支架连接,支架固定在飞机主承力结构上。舵机前端输出轴与推拉杆耳片连接,推拉杆另一端与下卡箍套筒连接固定。上下卡箍内贴橡胶垫,绕过飞机方向舵脚蹬立柱抱合固定,并用长螺栓贯穿卡箍和立柱防止相对滑动。本发明的前轮转向操纵机构结构简单、工作可靠且通用性强,适用于绝大部分有人机无人化改装的前轮转向操纵机构的设计安装。
前轮转向操纵机构.pdf
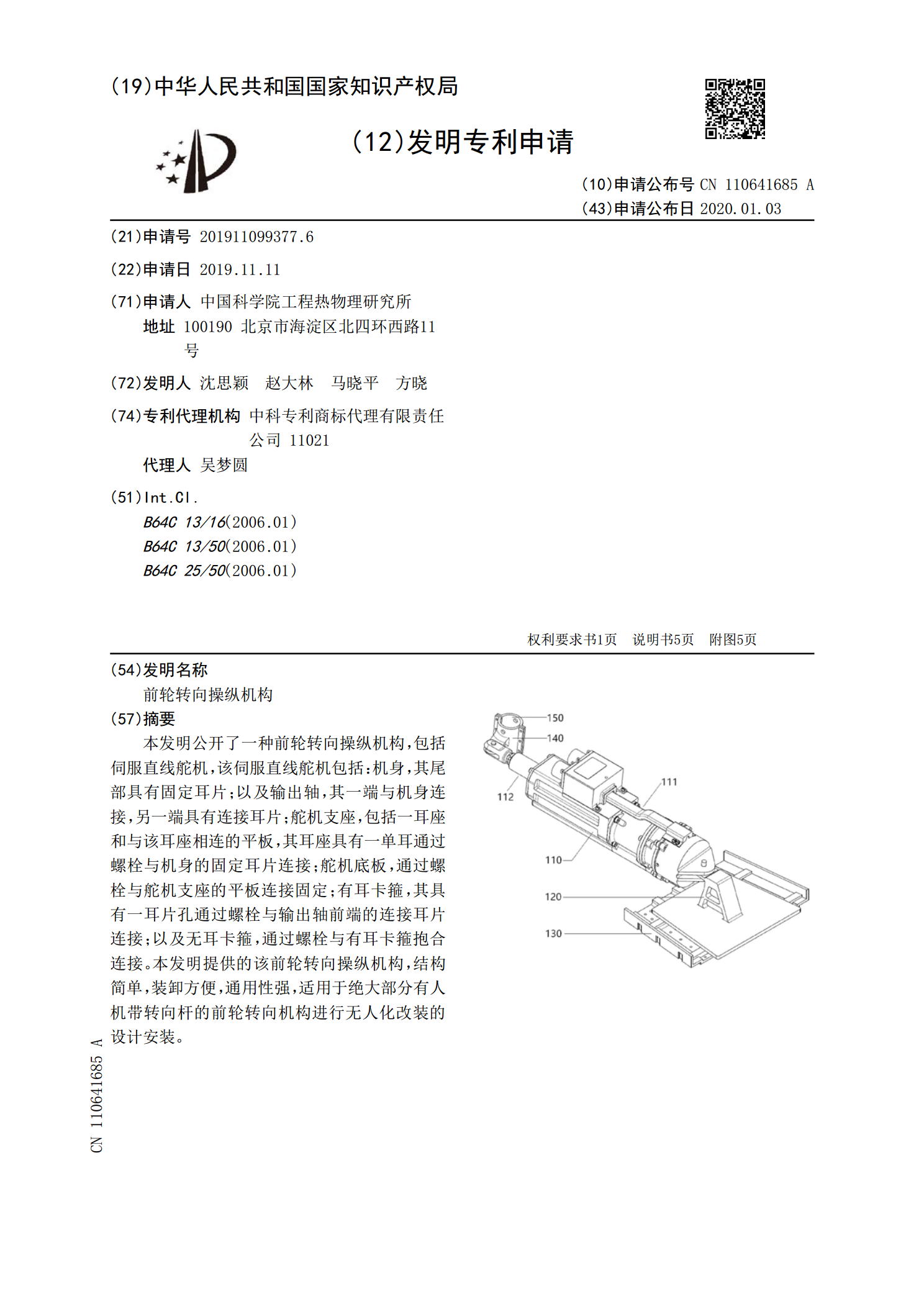
本发明公开了一种前轮转向操纵机构,包括伺服直线舵机,该伺服直线舵机包括:机身,其尾部具有固定耳片;以及输出轴,其一端与机身连接,另一端具有连接耳片;舵机支座,包括一耳座和与该耳座相连的平板,其耳座具有一单耳通过螺栓与机身的固定耳片连接;舵机底板,通过螺栓与舵机支座的平板连接固定;有耳卡箍,其具有一耳片孔通过螺栓与输出轴前端的连接耳片连接;以及无耳卡箍,通过螺栓与有耳卡箍抱合连接。本发明提供的该前轮转向操纵机构,结构简单,装卸方便,通用性强,适用于绝大部分有人机带转向杆的前轮转向机构进行无人化改装的设计安装
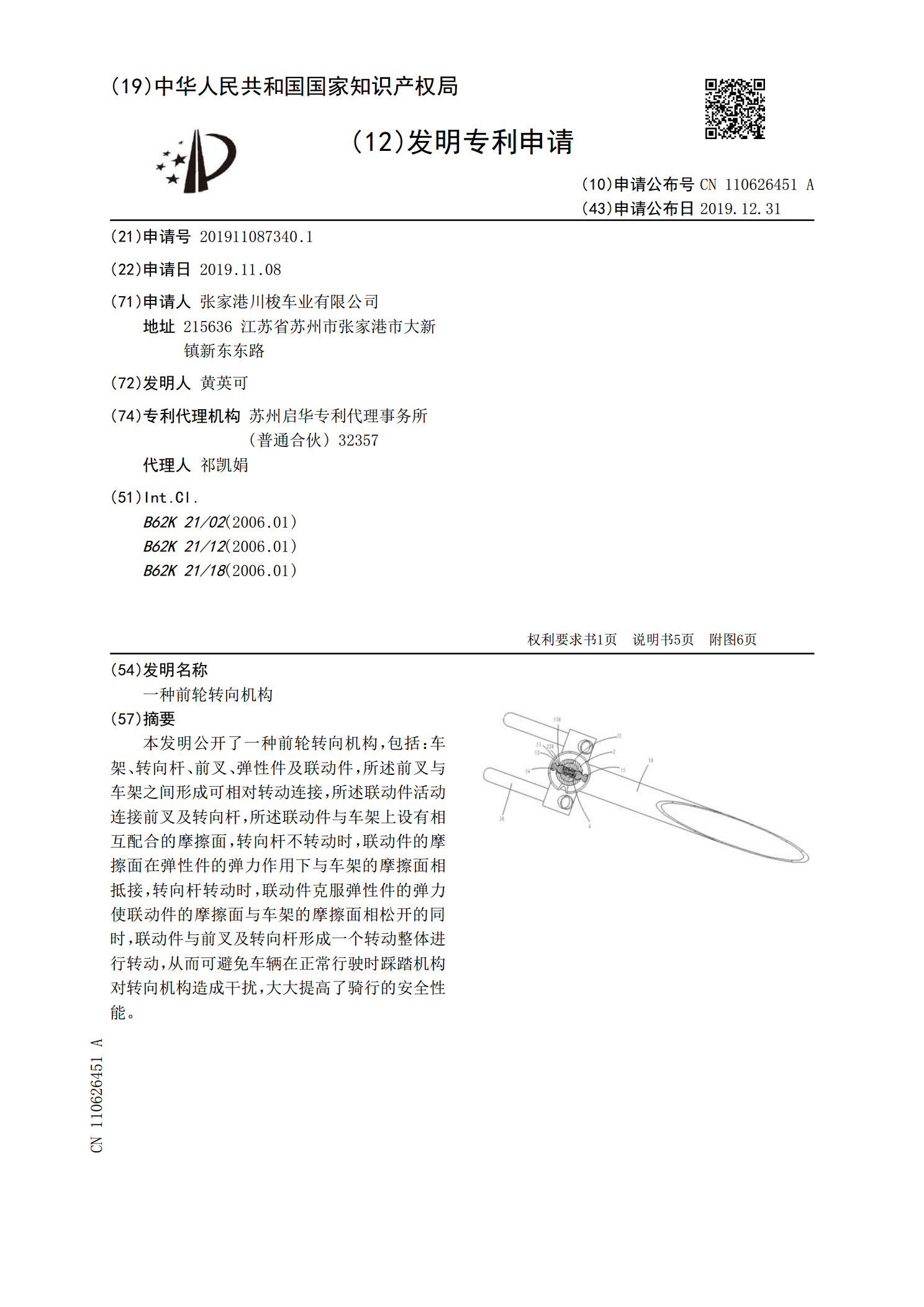
一种前轮转向机构.pdf
本发明公开了一种前轮转向机构,包括:车架、转向杆、前叉、弹性件及联动件,所述前叉与车架之间形成可相对转动连接,所述联动件活动连接前叉及转向杆,所述联动件与车架上设有相互配合的摩擦面,转向杆不转动时,联动件的摩擦面在弹性件的弹力作用下与车架的摩擦面相抵接,转向杆转动时,联动件克服弹性件的弹力使联动件的摩擦面与车架的摩擦面相松开的同时,联动件与前叉及转向杆形成一个转动整体进行转动,从而可避免车辆在正常行驶时踩踏机构对转向机构造成干扰,大大提高了骑行的安全性能。

一种前轮转向机构.pdf
本发明公开了一种前轮转向机构,包括前轮毂和前轮轴,还包括左制动器安装座、右制动器安装座、连接座;所述左制动器安装座、右制动器安装座左右对称地套设在前轮轴和前轮毂之间且与前轮毂之间通过轴承支撑;所述连接座设置于左制动器安装座和右制动器安装座之间,并靠螺钉使三者固连为一体;前轮轴中部竖直设置有安装孔,所述连接座上具有一穿过该安装孔的连接轴,连接轴与安装孔之间靠锥度轴承配合;所述左制动器安装座或右制动器安装座上固定设置有转向拉板。本发明使用时车辆转向过程中,传动无需经过前轮轴即可到达前轮并令其转动,大大提高了机
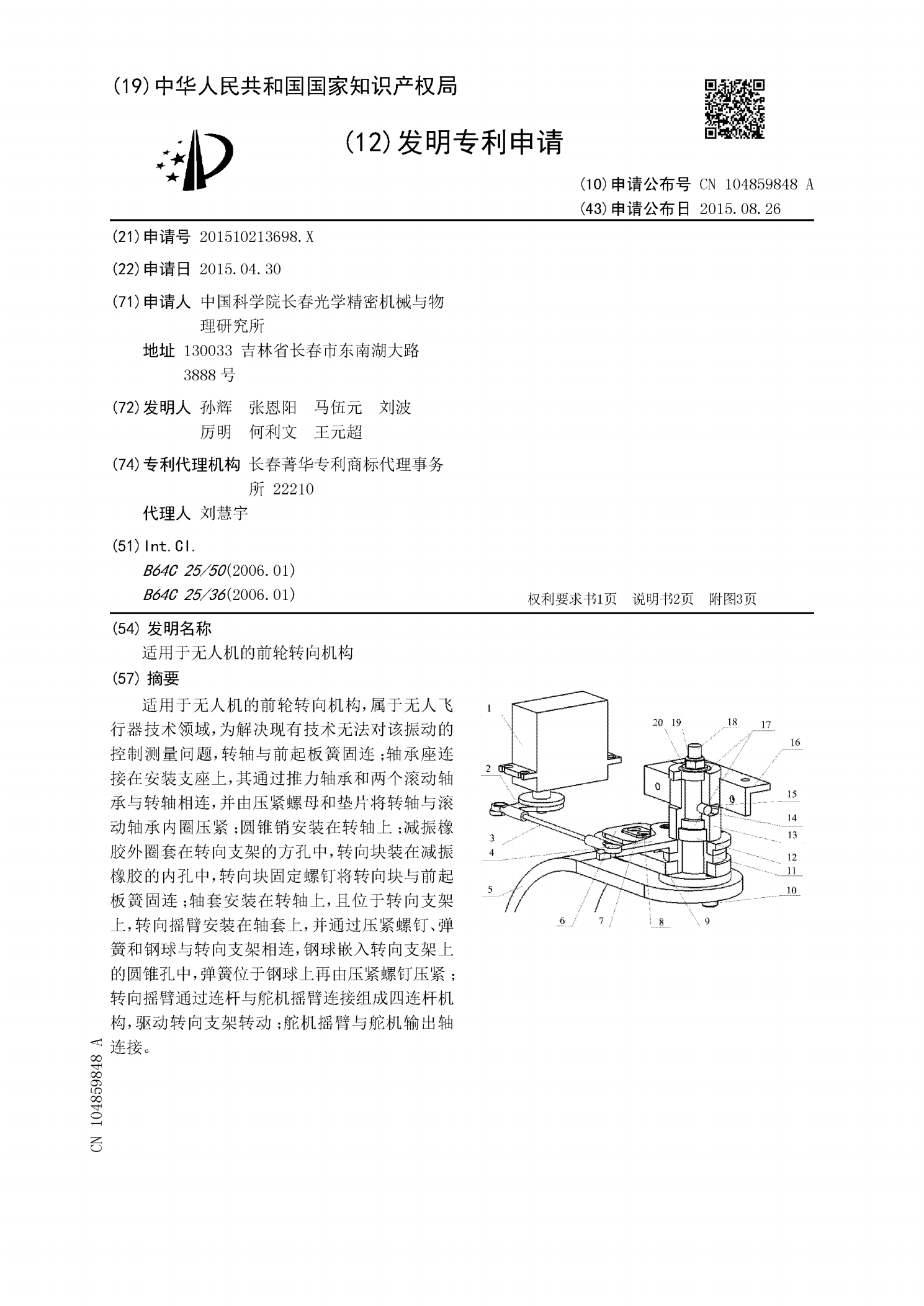
适用于无人机的前轮转向机构.pdf
适用于无人机的前轮转向机构,属于无人飞行器技术领域,为解决现有技术无法对该振动的控制测量问题,转轴与前起板簧固连;轴承座连接在安装支座上,其通过推力轴承和两个滚动轴承与转轴相连,并由压紧螺母和垫片将转轴与滚动轴承内圈压紧;圆锥销安装在转轴上;减振橡胶外圈套在转向支架的方孔中,转向块装在减振橡胶的内孔中,转向块固定螺钉将转向块与前起板簧固连;轴套安装在转轴上,且位于转向支架上,转向摇臂安装在轴套上,并通过压紧螺钉、弹簧和钢球与转向支架相连,钢球嵌入转向支架上的圆锥孔中,弹簧位于钢球上再由压紧螺钉压紧;转向摇