
一种智能工业悬臂.pdf

是秋****写意

1/6
2/6
3/6

4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能工业悬臂.pdf
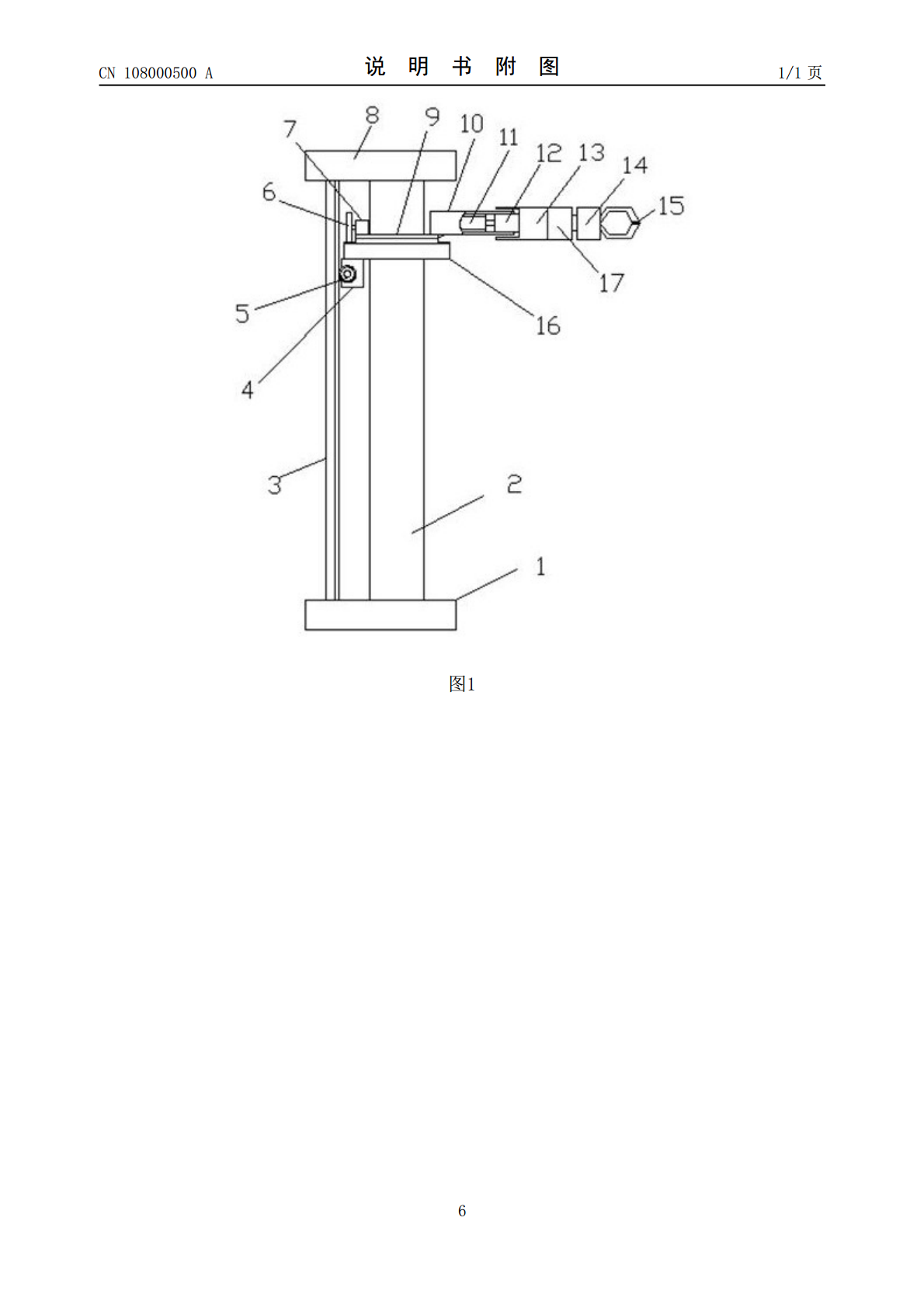
本发明公开了一种智能工业悬臂,包括:立柱和齿条,所述立柱上设置有滑套,所述滑套上设置有轴承,所述轴承上设置有转盘,所述转盘上设置有第一步进电机,所述滑套顶部设置有一圈齿盘,所述第一步进电机的输出轴上设置有与齿盘啮合的第一齿轮,所述滑套底部设置有第二步进电机,所述第二步进电机的输出轴上设置有与齿条啮合的第二齿轮,所述转盘上设置有指向外侧的第一悬臂,所述第一悬臂末端套设有第二悬臂,所述第二悬臂末端设置有第三步进电机,所述第三步进电机的输出轴上设置有气动卡钳。通过上述方式,本发明所述的智能工业悬臂,操作灵活,确
一种齿条传动的工业悬臂.pdf
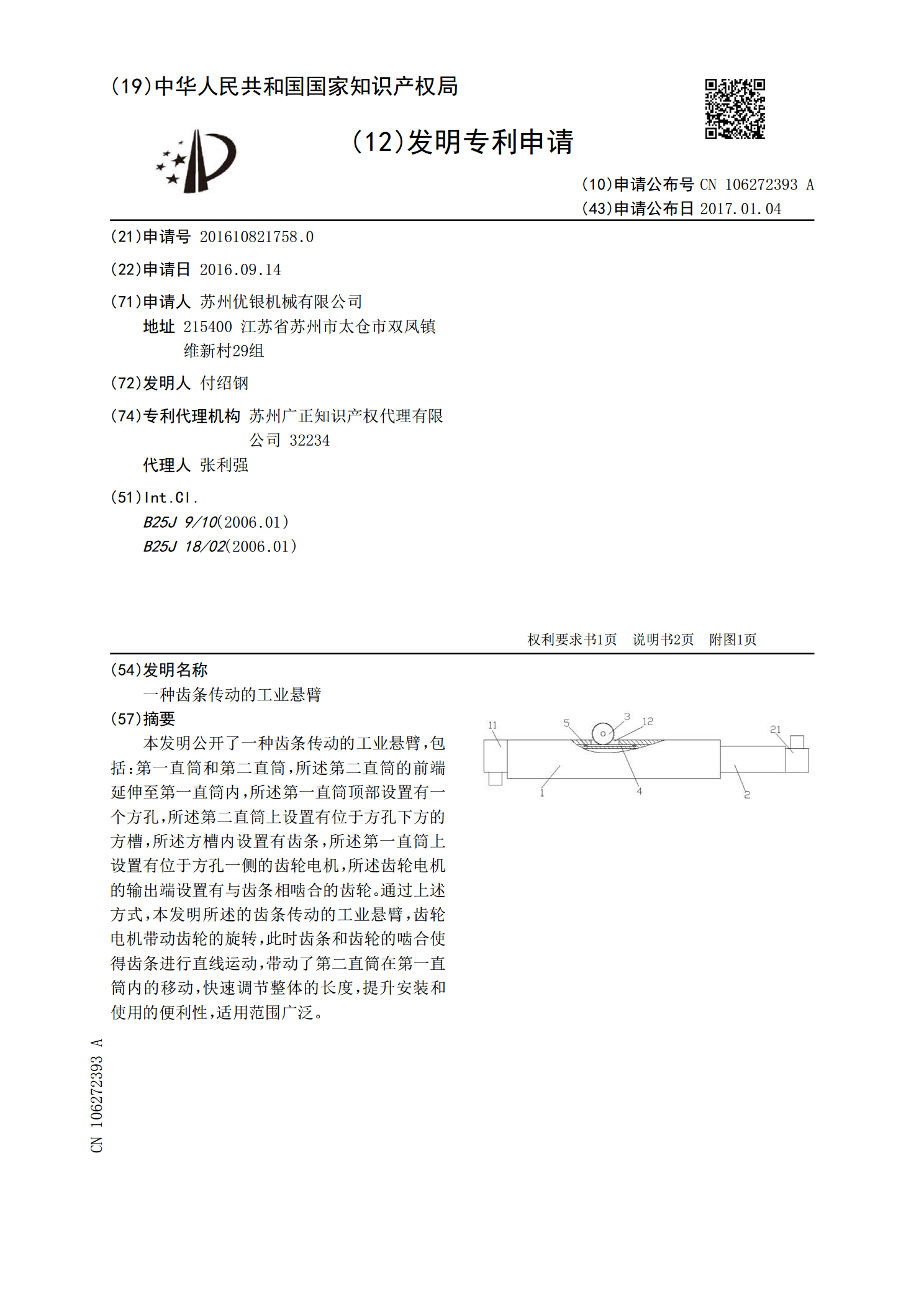
本发明公开了一种齿条传动的工业悬臂,包括:第一直筒和第二直筒,所述第二直筒的前端延伸至第一直筒内,所述第一直筒顶部设置有一个方孔,所述第二直筒上设置有位于方孔下方的方槽,所述方槽内设置有齿条,所述第一直筒上设置有位于方孔一侧的齿轮电机,所述齿轮电机的输出端设置有与齿条相啮合的齿轮。通过上述方式,本发明所述的齿条传动的工业悬臂,齿轮电机带动齿轮的旋转,此时齿条和齿轮的啮合使得齿条进行直线运动,带动了第二直筒在第一直筒内的移动,快速调节整体的长度,提升安装和使用的便利性,适用范围广泛。
一种多轴工业悬臂.pdf
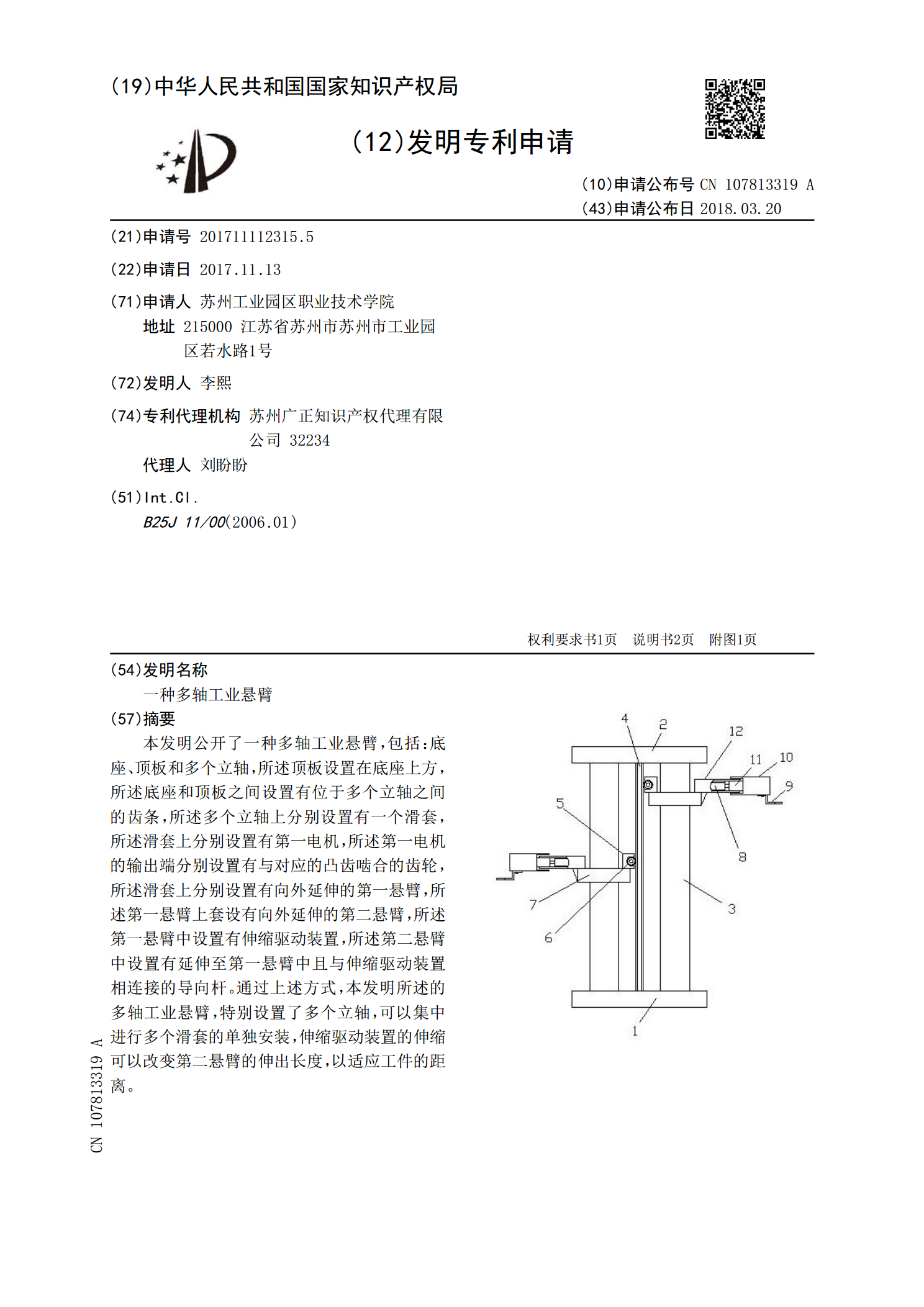
本发明公开了一种多轴工业悬臂,包括:底座、顶板和多个立轴,所述顶板设置在底座上方,所述底座和顶板之间设置有位于多个立轴之间的齿条,所述多个立轴上分别设置有一个滑套,所述滑套上分别设置有第一电机,所述第一电机的输出端分别设置有与对应的凸齿啮合的齿轮,所述滑套上分别设置有向外延伸的第一悬臂,所述第一悬臂上套设有向外延伸的第二悬臂,所述第一悬臂中设置有伸缩驱动装置,所述第二悬臂中设置有延伸至第一悬臂中且与伸缩驱动装置相连接的导向杆。通过上述方式,本发明所述的多轴工业悬臂,特别设置了多个立轴,可以集中进行多个滑套
一种回转伸缩的工业悬臂.pdf
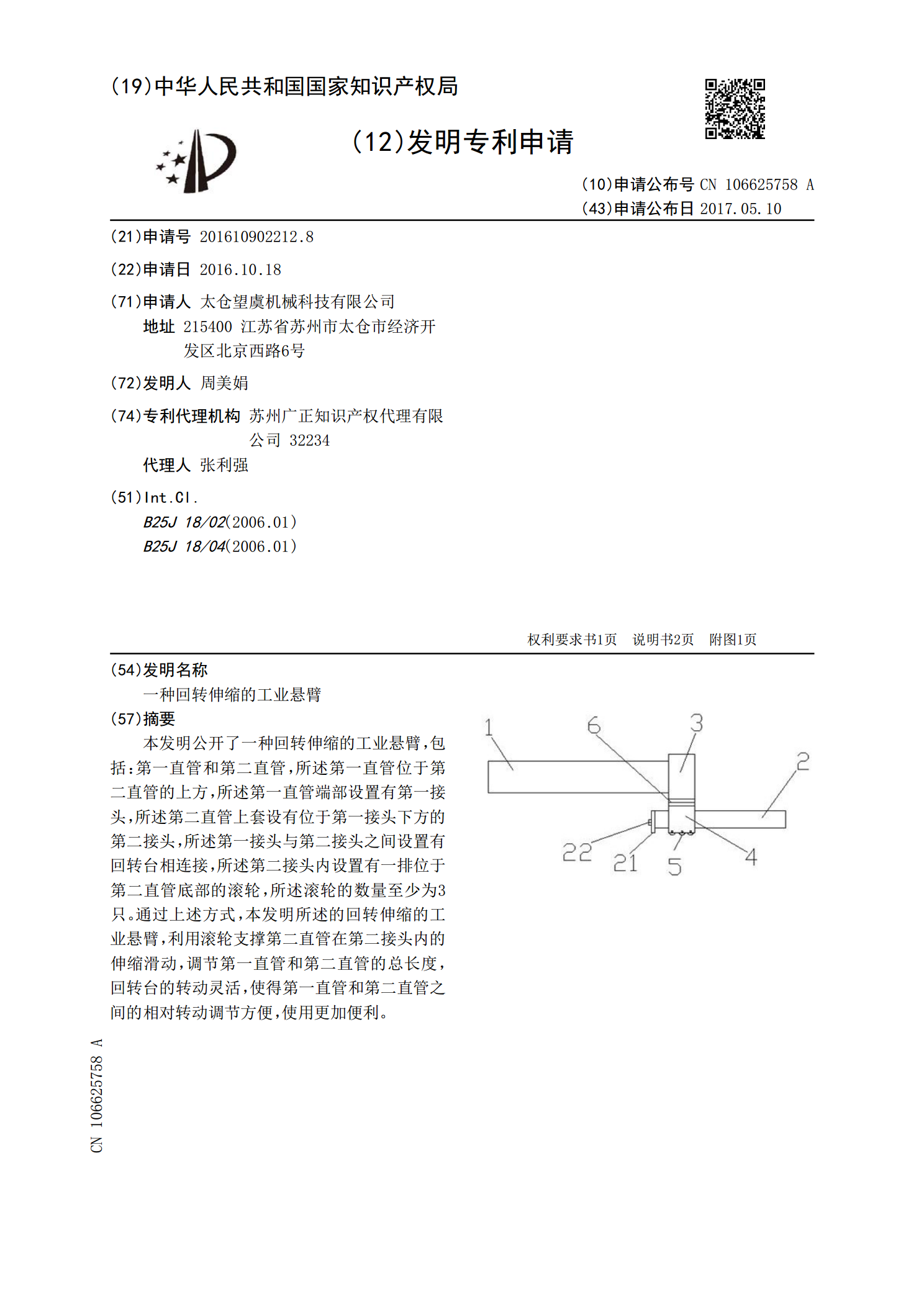
本发明公开了一种回转伸缩的工业悬臂,包括:第一直管和第二直管,所述第一直管位于第二直管的上方,所述第一直管端部设置有第一接头,所述第二直管上套设有位于第一接头下方的第二接头,所述第一接头与第二接头之间设置有回转台相连接,所述第二接头内设置有一排位于第二直管底部的滚轮,所述滚轮的数量至少为3只。通过上述方式,本发明所述的回转伸缩的工业悬臂,利用滚轮支撑第二直管在第二接头内的伸缩滑动,调节第一直管和第二直管的总长度,回转台的转动灵活,使得第一直管和第二直管之间的相对转动调节方便,使用更加便利。
一种悬臂浇筑桥梁悬臂端混凝土智能养护结构及养护方法.pdf
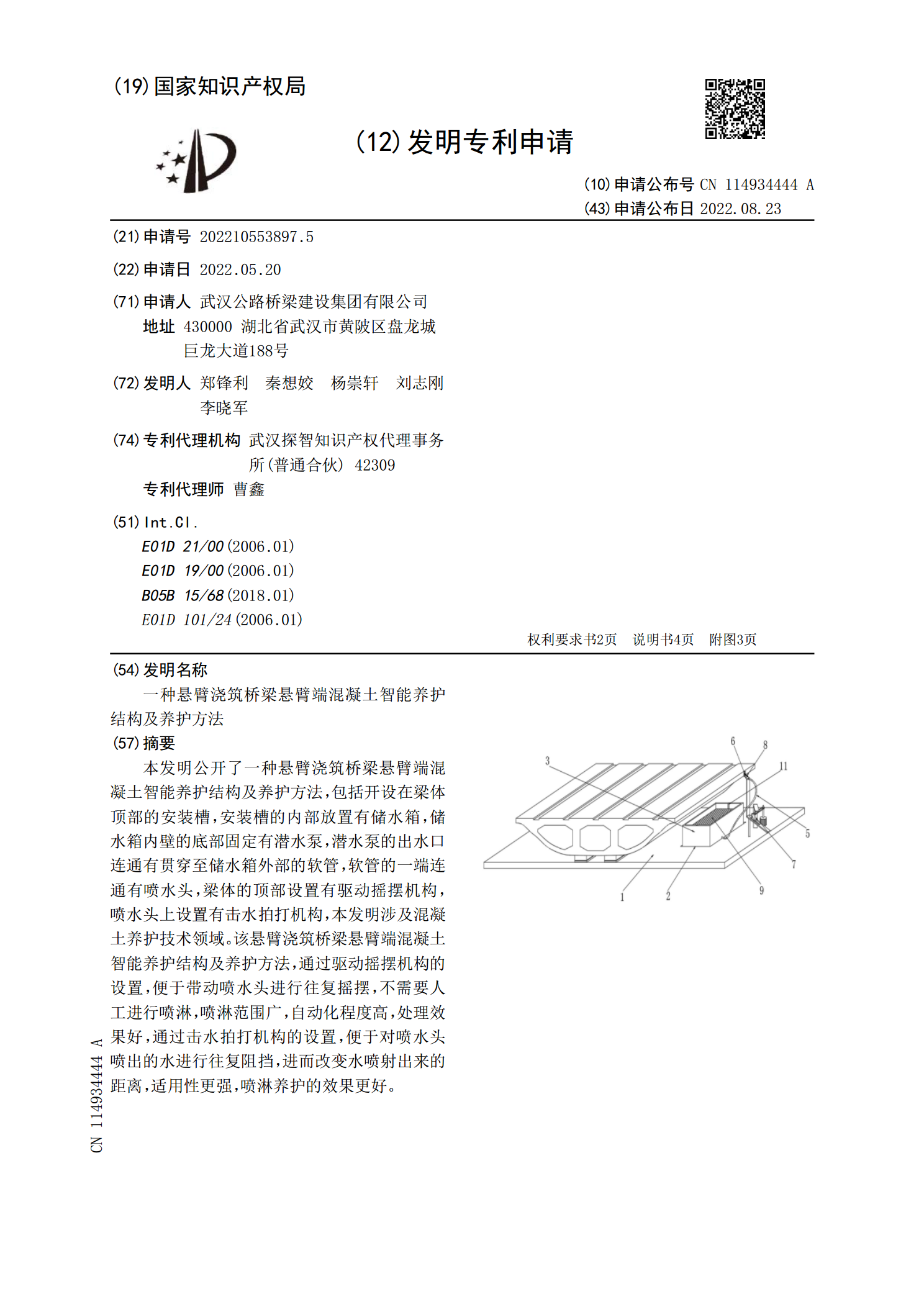
本发明公开了一种悬臂浇筑桥梁悬臂端混凝土智能养护结构及养护方法,包括开设在梁体顶部的安装槽,安装槽的内部放置有储水箱,储水箱内壁的底部固定有潜水泵,潜水泵的出水口连通有贯穿至储水箱外部的软管,软管的一端连通有喷水头,梁体的顶部设置有驱动摇摆机构,喷水头上设置有击水拍打机构,本发明涉及混凝土养护技术领域。该悬臂浇筑桥梁悬臂端混凝土智能养护结构及养护方法,通过驱动摇摆机构的设置,便于带动喷水头进行往复摇摆,不需要人工进行喷淋,喷淋范围广,自动化程度高,处理效果好,通过击水拍打机构的设置,便于对喷水头喷出的水进