
四行星架十一齿第一行星架二级行星轮系式RCM机构.pdf

婀娜****aj

1/9

2/9

3/9

4/9
5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
四行星架十一齿第一行星架二级行星轮系式RCM机构.pdf
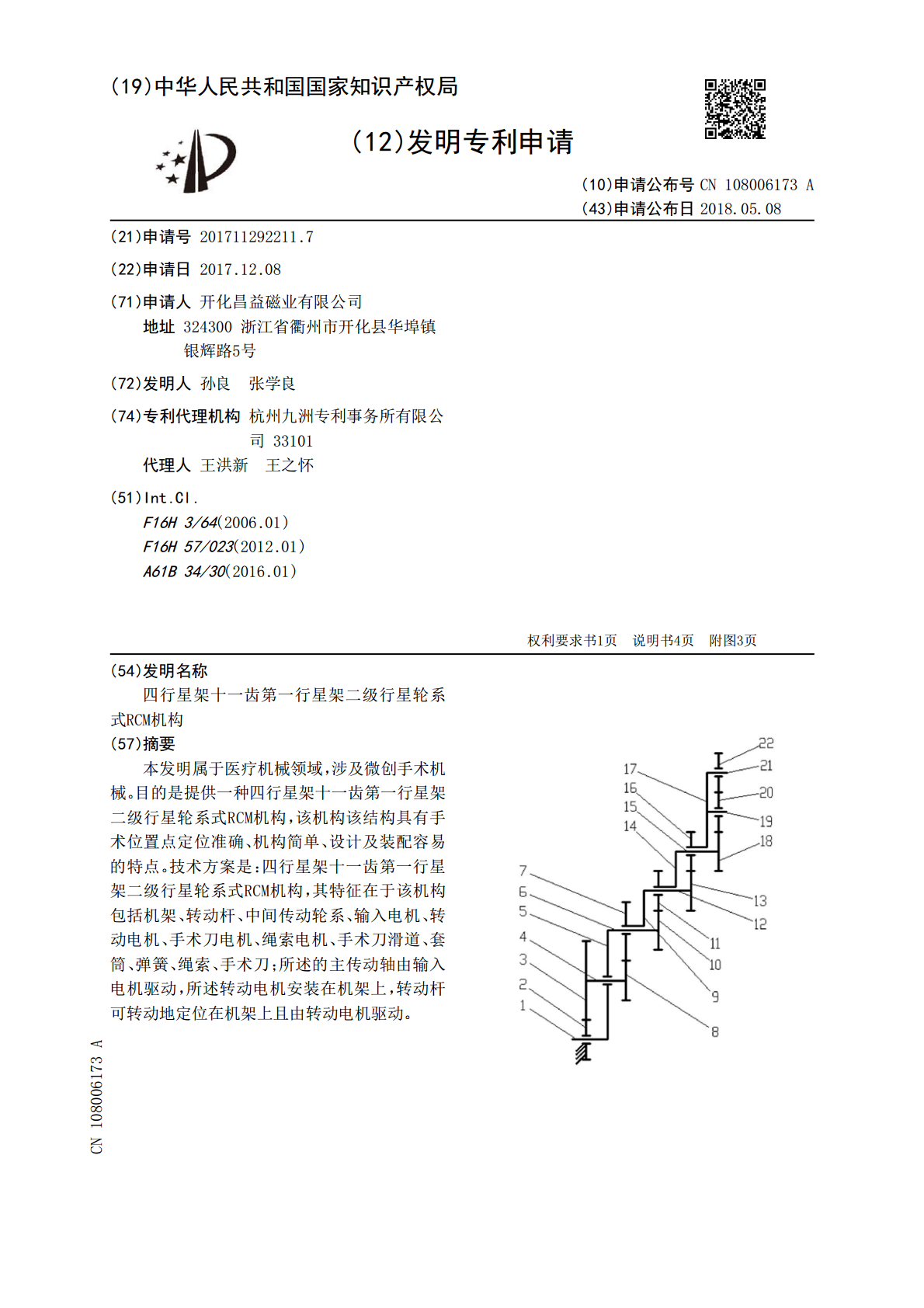
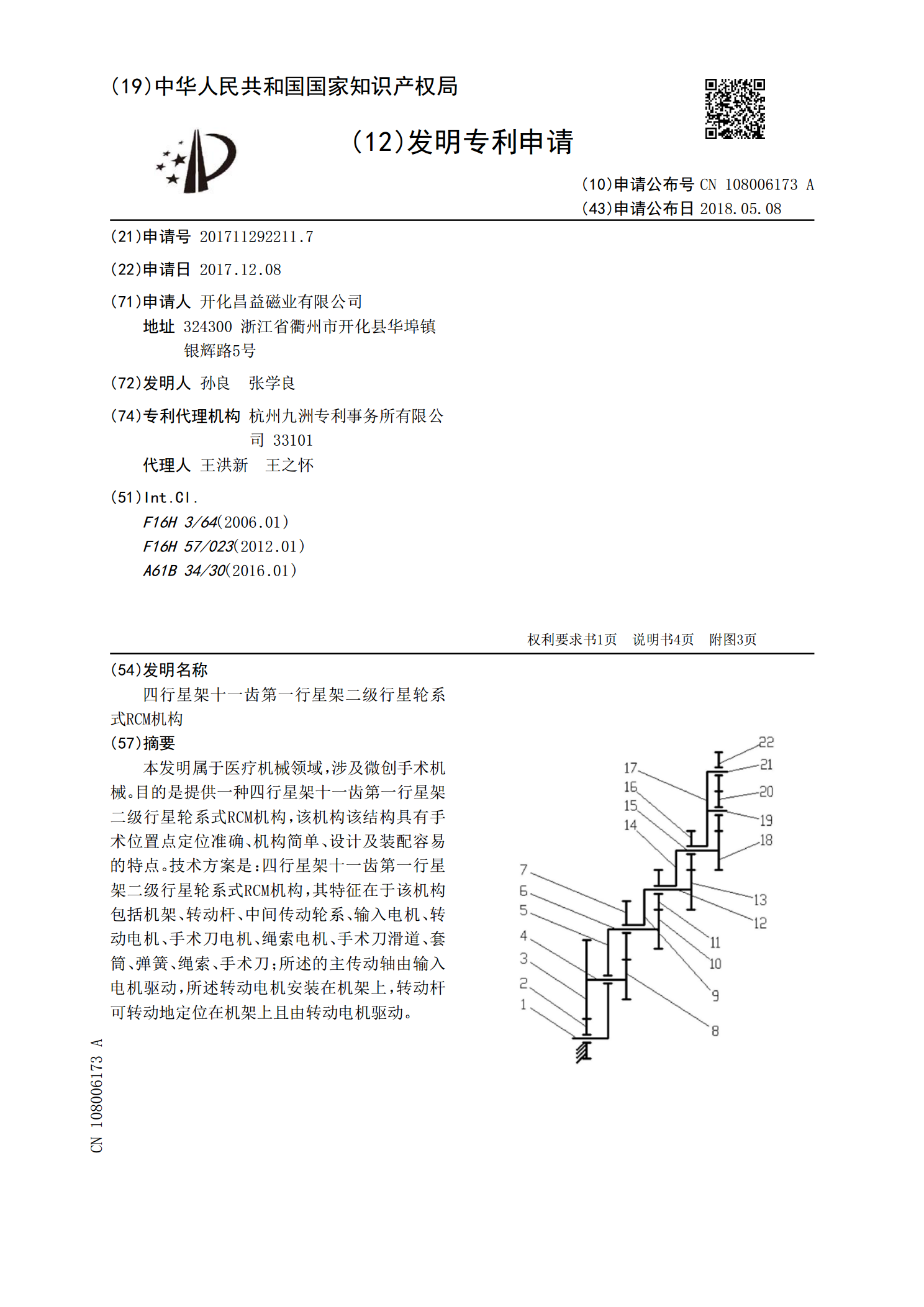
本发明属于医疗机械领域,涉及微创手术机械。目的是提供一种四行星架十一齿第一行星架二级行星轮系式RCM机构,该机构该结构具有手术位置点定位准确、机构简单、设计及装配容易的特点。技术方案是:四行星架十一齿第一行星架二级行星轮系式RCM机构,其特征在于该机构包括机架、转动杆、中间传动轮系、输入电机、转动电机、手术刀电机、绳索电机、手术刀滑道、套筒、弹簧、绳索、手术刀;所述的主传动轴由输入电机驱动,所述转动电机安装在机架上,转动杆可转动地定位在机架上且由转动电机驱动。

二行星架八齿行星轮系式RCM机构.pdf
本发明属于医疗机械领域,涉及微创手术机械。目的是使杆件齿轮组合来实现一种RCM机构,该机构具有手术位置点定位准确、机构简单、设计及装配容易的特点。技术方案是:二行星架八齿行星轮系式RCM机构,其特征在于该机构包括轴线相互平行的固定轮、第一中间轮、两个传动轮,第一行星轮、太阳轮、从动行星架、第二中间轮以及第二行星轮,还包括转动杆电机、转动杆、主动行星架电机、手术刀、转动套筒、移动套筒、弹簧、手术刀电机、绳索、绳索电机;所述的转动杆电机的底座安装在机架上,转动杆的一端与转动杆电机的输出轴固定,且转动杆的杆长方

四行星架十一齿第一行星架一级行星轮系式RCM机构.pdf
本发明属于医疗机械领域,涉及微创手术机械。目的是提供一种平面轮系式3R1T的RCM机构,该结构具有手术位置点定位准确、机构简单、设计及装配容易的特点。技术方案是:四行星架十一齿第一行星架一级行星轮系式RCM机构,其特征在于该机构包括机架、转动杆、中间传动轮系、输入电机、转动电机、手术刀电机、绳索电机、手术刀滑道、套筒、弹簧、绳索、手术刀;所述中间传动轮系由输入电机驱动;所述的转动杆可转动地定位在机架上,转动电机也安装在机架上且驱动转动杆。

三行星架十齿第二行星架二级行星轮系式RCM机构.pdf
本发明属于医疗机械领域,涉及微创手术机械。目的是提供一种平面轮系式3R1T的RCM机构,该结构具有手术位置点定位准确、机构简单、设计及装配容易的特点。技术方案是:三行星架十齿第二行星架二级行星轮系式RCM机构,包括机架、转动杆、中间传动轮系、输入电机、转动电机、手术刀电机、绳索电机、手术刀滑道、套筒、弹簧、绳索、手术刀;所述的转动杆可转动地安装在机架上,固定于机架的转动电机驱使转动杆转动。

三行星架十齿第一行星架三级行星轮系式RCM机构.pdf
本发明属于医疗机械领域,涉及微创手术机械。目的是提供一种平面轮系式3R1T的RCM机构,该结构具有手术位置点定位准确、机构简单、设计及装配容易的特点。技术方案是:三行星架十齿第一行星架三级行星轮系式RCM机构,其特征在于该机构包括机架、转动杆、中间传动轮系、输入电机、转动电机、手术刀电机、绳索电机、手术刀滑道、套筒、弹簧、绳索、手术刀;所述的中间传动轮系由输入电机驱动;所述的转动杆可转动地定位在机架上,转动电机也安装在机架上且驱动转动杆。