
柔性底座和搬运机器人.pdf

一只****iu

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
柔性底座和搬运机器人.pdf
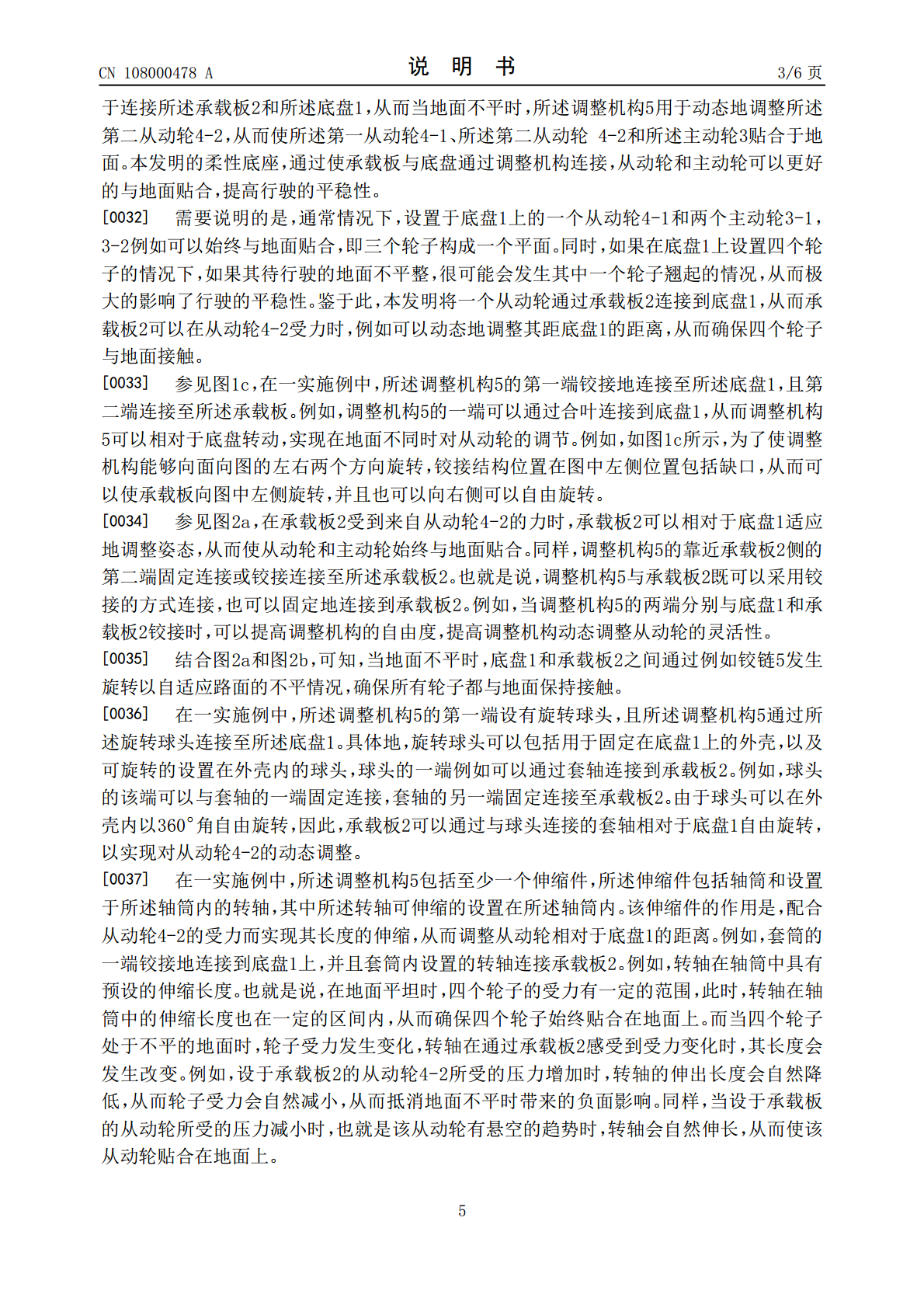
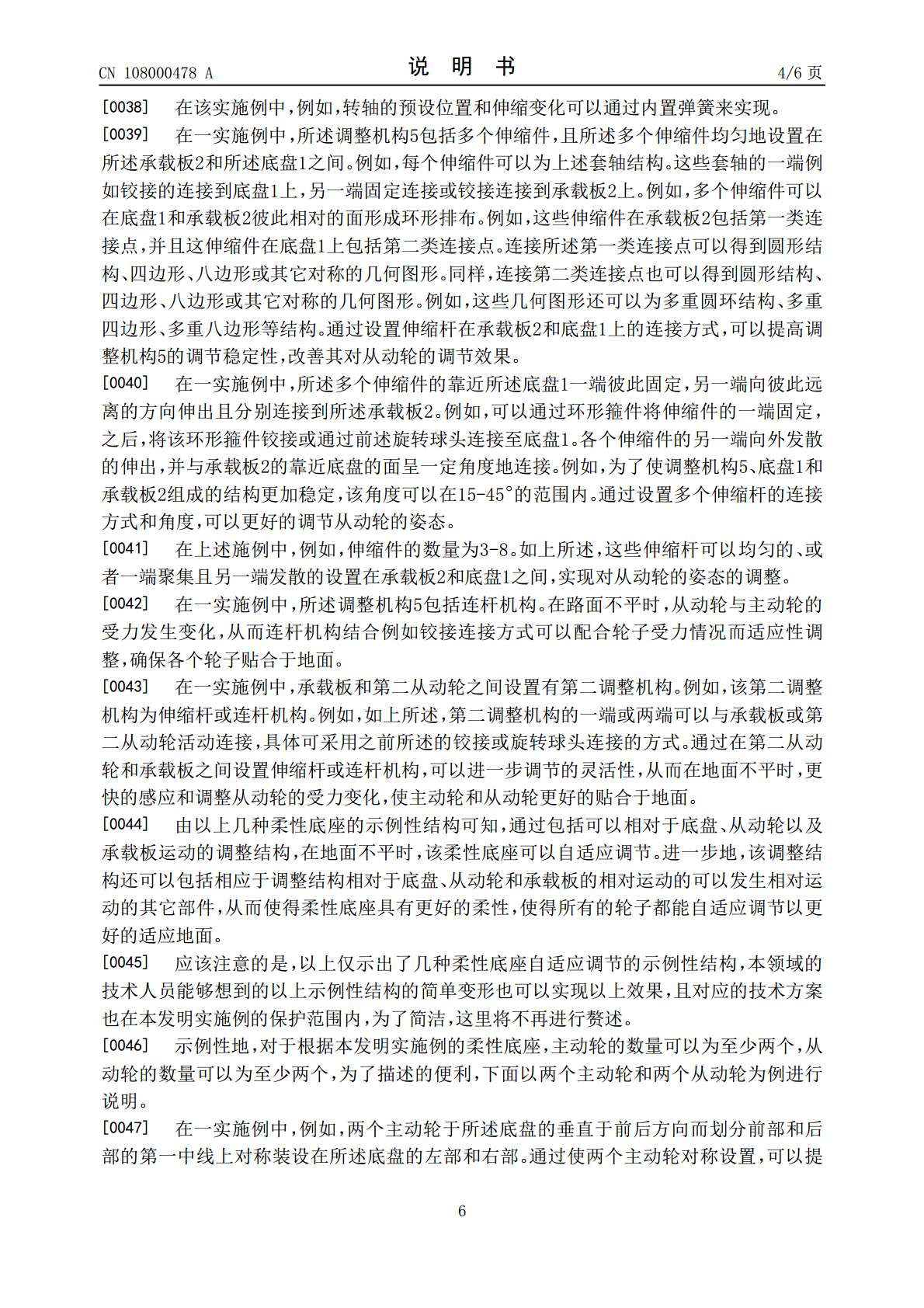
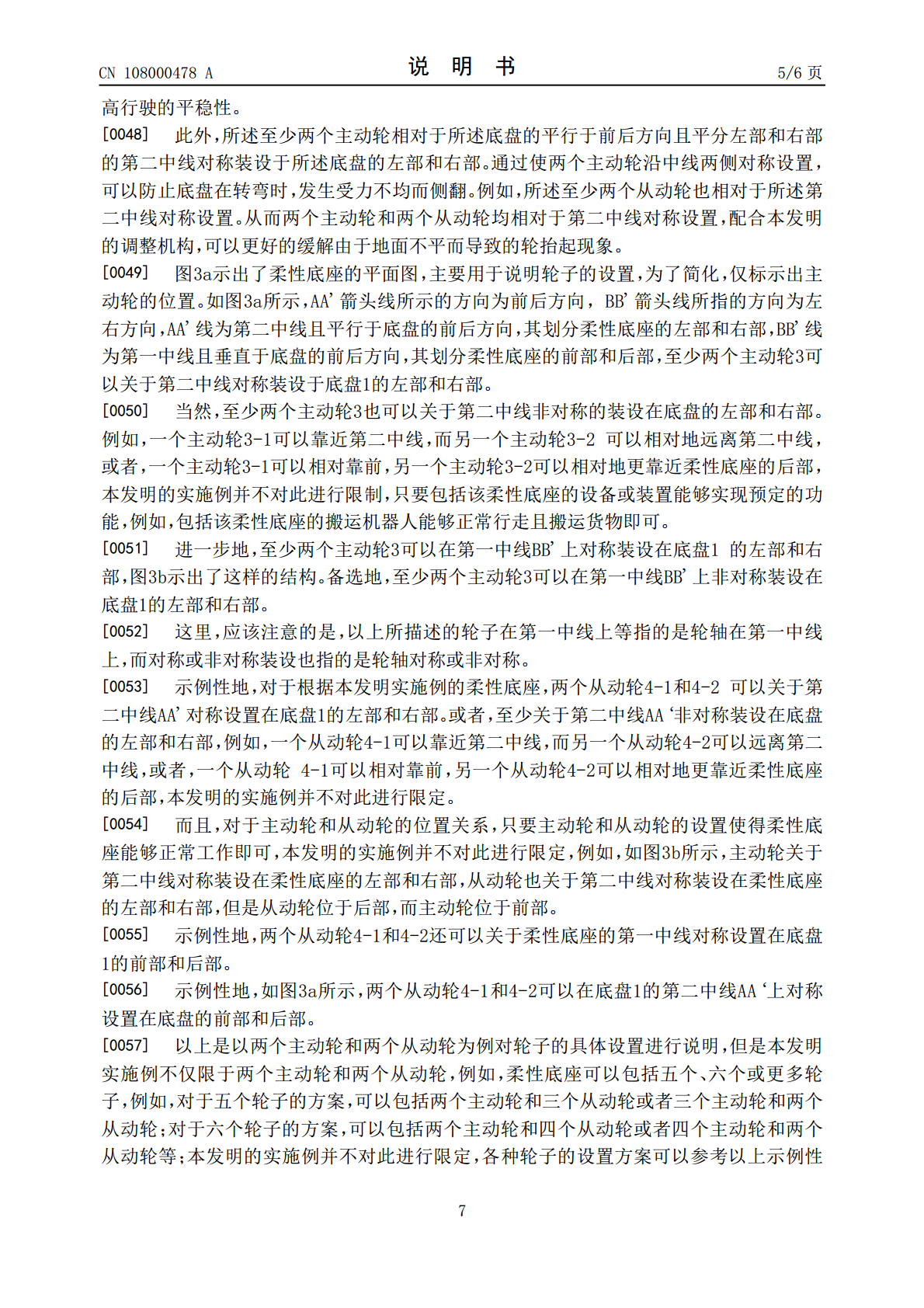
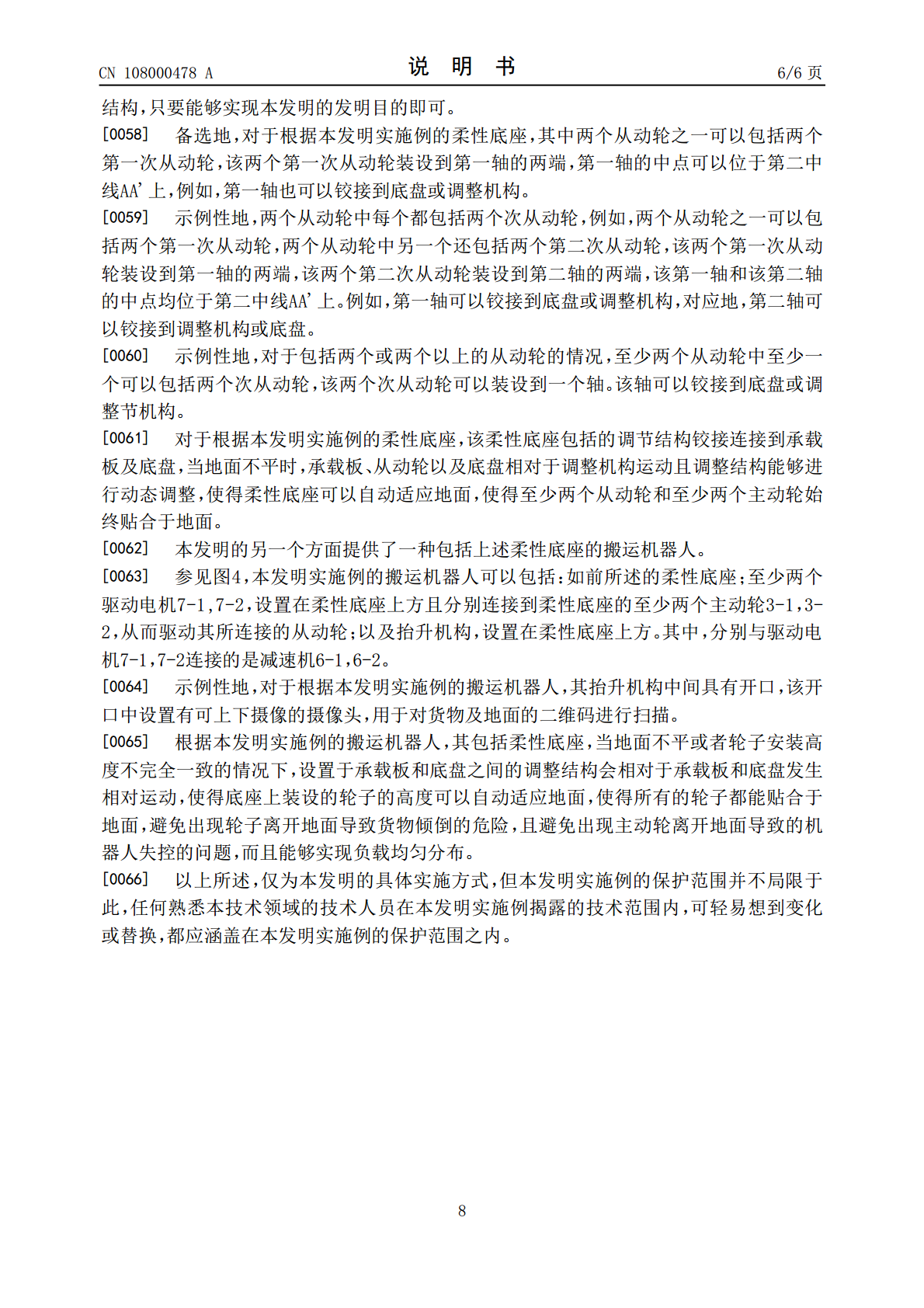
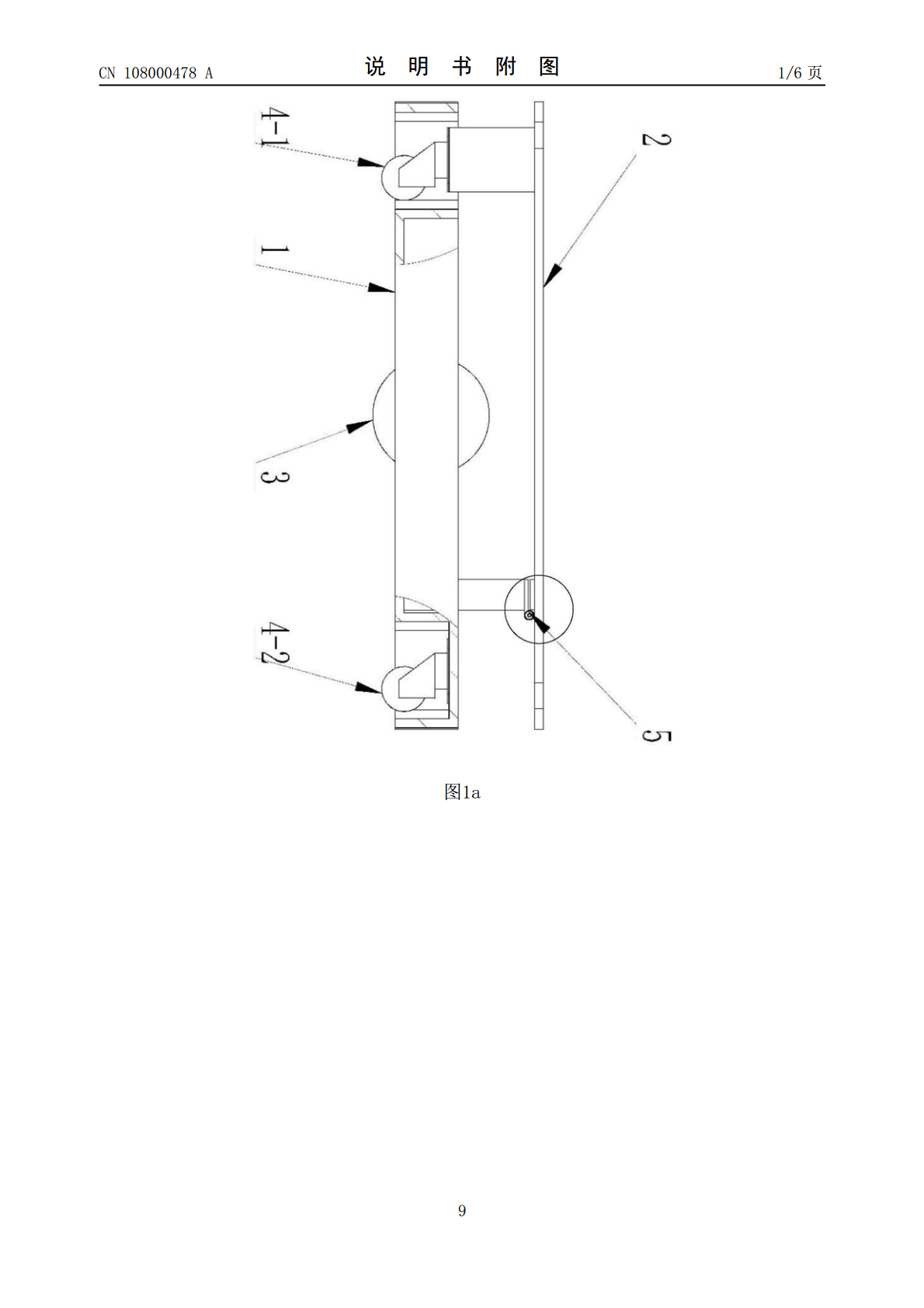
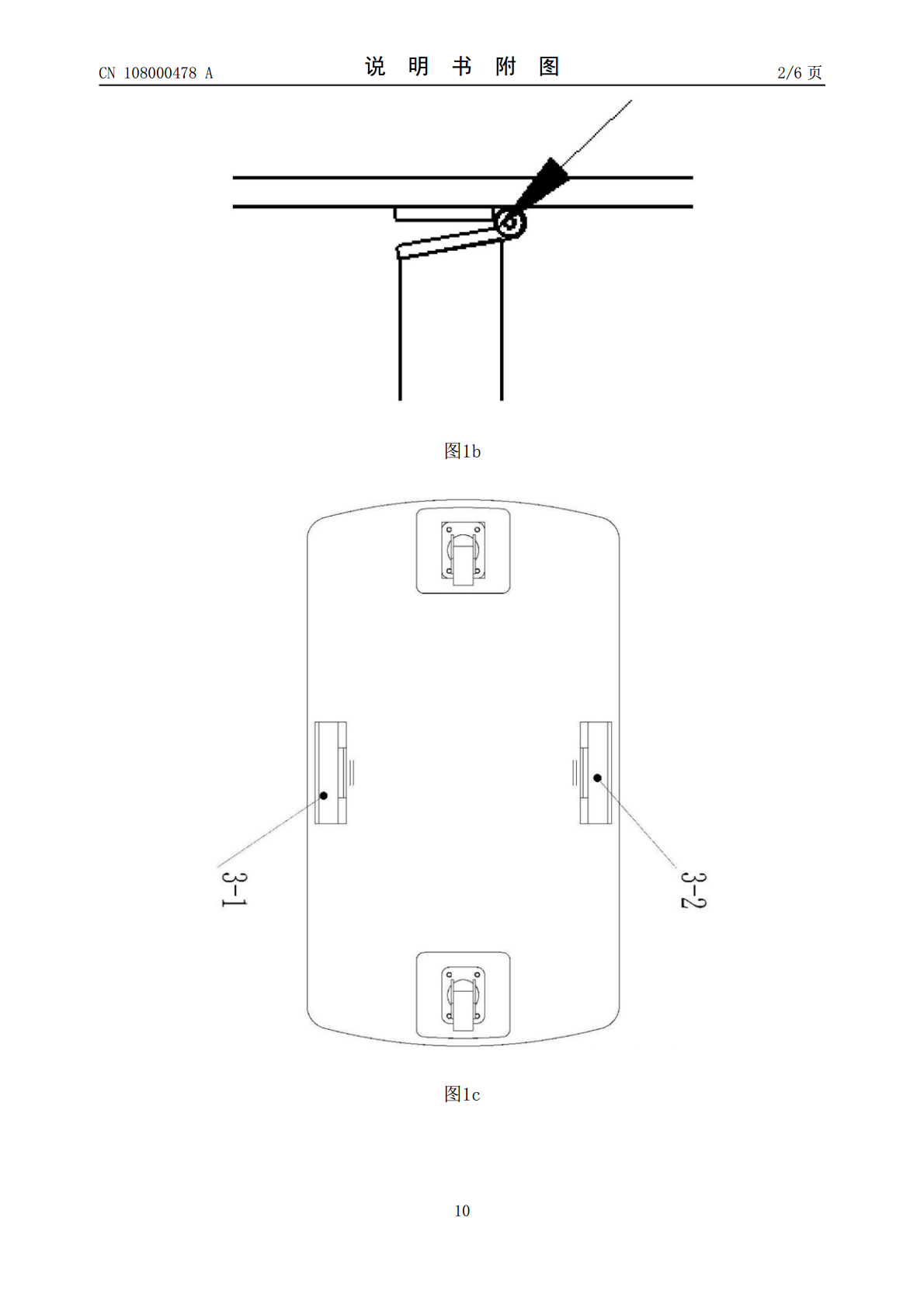
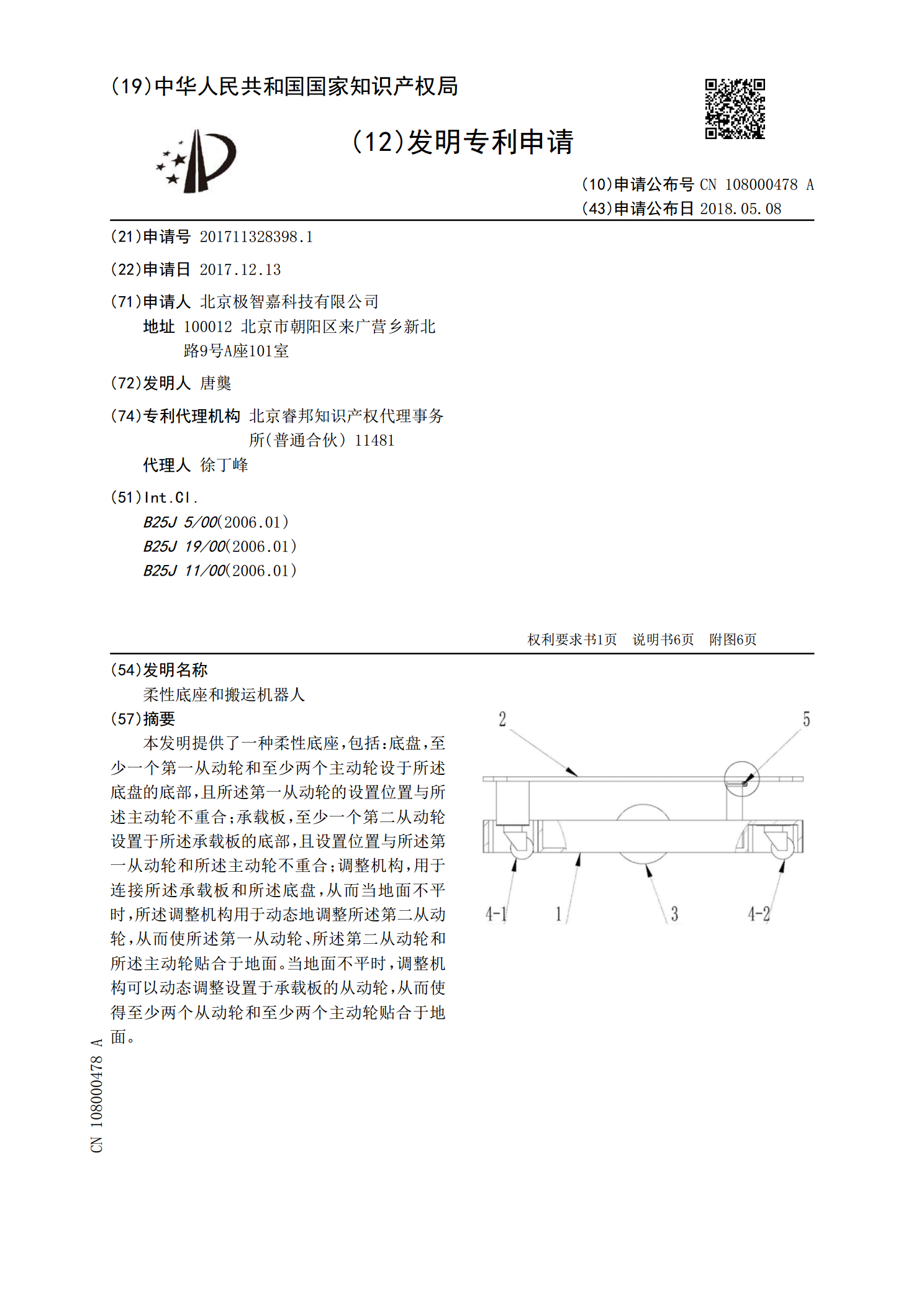
本发明提供了一种柔性底座,包括:底盘,至少一个第一从动轮和至少两个主动轮设于所述底盘的底部,且所述第一从动轮的设置位置与所述主动轮不重合;承载板,至少一个第二从动轮设置于所述承载板的底部,且设置位置与所述第一从动轮和所述主动轮不重合;调整机构,用于连接所述承载板和所述底盘,从而当地面不平时,所述调整机构用于动态地调整所述第二从动轮,从而使所述第一从动轮、所述第二从动轮和所述主动轮贴合于地面。当地面不平时,调整机构可以动态调整设置于承载板的从动轮,从而使得至少两个从动轮和至少两个主动轮贴合于地面。
柔性底座以及包括该柔性底座的搬运机器人.pdf
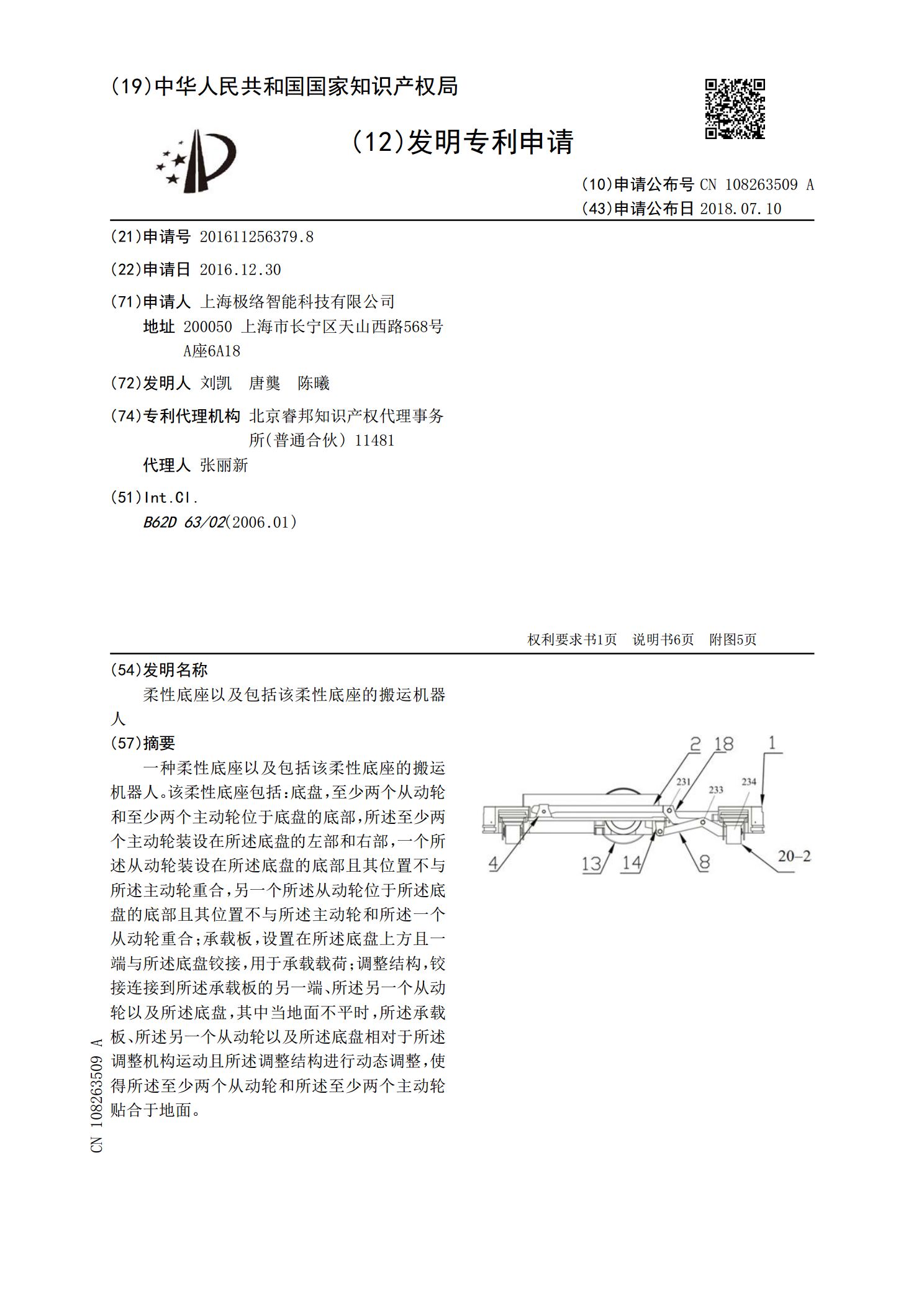
一种柔性底座以及包括该柔性底座的搬运机器人。该柔性底座包括:底盘,至少两个从动轮和至少两个主动轮位于底盘的底部,所述至少两个主动轮装设在所述底盘的左部和右部,一个所述从动轮装设在所述底盘的底部且其位置不与所述主动轮重合,另一个所述从动轮位于所述底盘的底部且其位置不与所述主动轮和所述一个从动轮重合;承载板,设置在所述底盘上方且一端与所述底盘铰接,用于承载载荷;调整结构,铰接连接到所述承载板的另一端、所述另一个从动轮以及所述底盘,其中当地面不平时,所述承载板、所述另一个从动轮以及所述底盘相对于所述调整机构运动
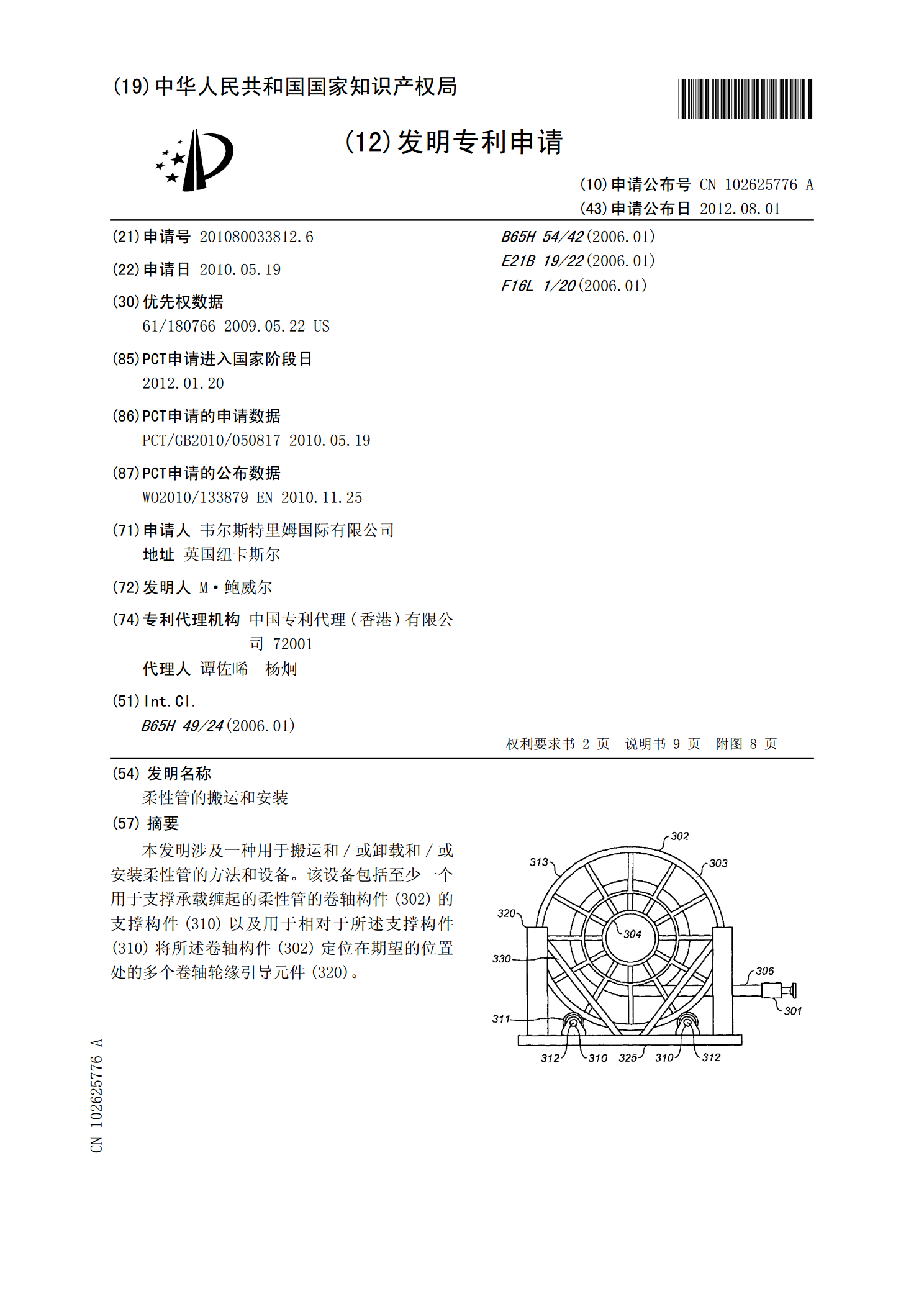
柔性管的搬运和安装.pdf
本发明涉及一种用于搬运和/或卸载和/或安装柔性管的方法和设备。该设备包括至少一个用于支撑承载缠起的柔性管的卷轴构件(302)的支撑构件(310)以及用于相对于所述支撑构件(310)将所述卷轴构件(302)定位在期望的位置处的多个卷轴轮缘引导元件(320)。

柔性冲压生产线搬运机器人设计.doc
全套设计(图纸)加扣扣194535455全套设计(图纸)加扣扣194535455摘要目前,工业机器人已经广泛运用于工厂的生产车间,搬运机器人更是在车间的生产线上随处可见。由于生产车间的人工劳动力越来越缺乏,而生产车间的劳动强度也不断增强,故而越来越多工业机器人被运用到生产中,其中常见的有搬运机器人、弧焊机器人、点焊机器人等。在生产车间中机器人是工业生产中的主要劳动力,工业机器人的运用使得车间生产效率大大提高。我国的工业机器人相比国外强者来说,技术还很缺乏,需要不断的研究改进。近年来我国在工业机器人的理论、

柔性冲压生产线搬运机器人设计.doc
全套设计(图纸)加扣扣194535455全套设计(图纸)加扣扣194535455摘要目前,工业机器人已经广泛运用于工厂的生产车间,搬运机器人更是在车间的生产线上随处可见。由于生产车间的人工劳动力越来越缺乏,而生产车间的劳动强度也不断增强,故而越来越多工业机器人被运用到生产中,其中常见的有搬运机器人、弧焊机器人、点焊机器人等。在生产车间中机器人是工业生产中的主要劳动力,工业机器人的运用使得车间生产效率大大提高。我国的工业机器人相比国外强者来说,技术还很缺乏,需要不断的研究改进。近年来我国在工业机器人的理论、