
柔性底座以及包括该柔性底座的搬运机器人.pdf

猫巷****提格


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
柔性底座以及包括该柔性底座的搬运机器人.pdf
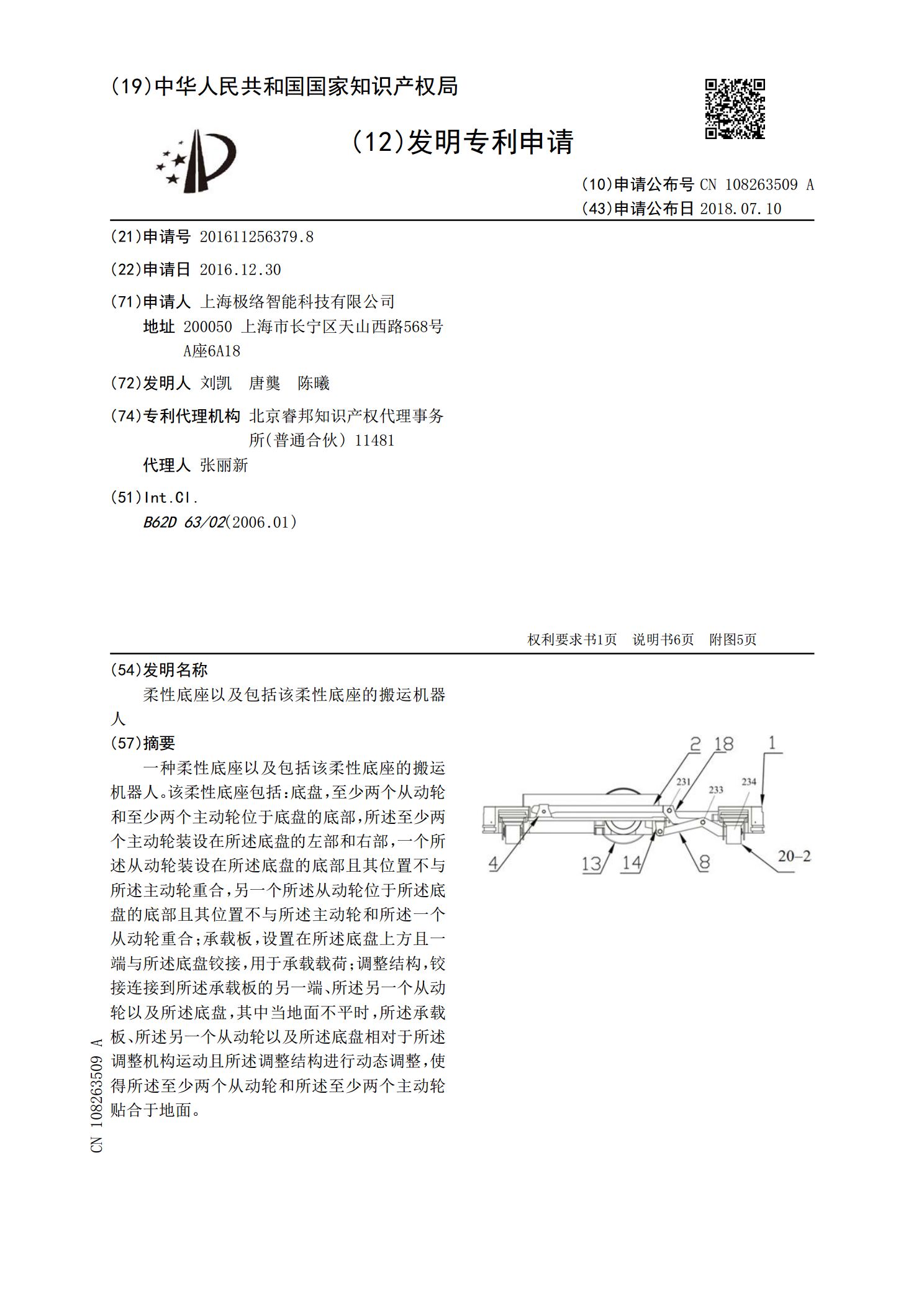
一种柔性底座以及包括该柔性底座的搬运机器人。该柔性底座包括:底盘,至少两个从动轮和至少两个主动轮位于底盘的底部,所述至少两个主动轮装设在所述底盘的左部和右部,一个所述从动轮装设在所述底盘的底部且其位置不与所述主动轮重合,另一个所述从动轮位于所述底盘的底部且其位置不与所述主动轮和所述一个从动轮重合;承载板,设置在所述底盘上方且一端与所述底盘铰接,用于承载载荷;调整结构,铰接连接到所述承载板的另一端、所述另一个从动轮以及所述底盘,其中当地面不平时,所述承载板、所述另一个从动轮以及所述底盘相对于所述调整机构运动

底座以及包括该底座的搬运车.pdf
一种底座以及包括该底座的搬运车,该底座包括:底盘,其底部设置有两个或两个以上车轮;举升机构,设置于底盘之上,包括:第一和第二连杆,并排设置在平行于底盘的平面中;第一和第二连接件,二者彼此平行,第一连接件转动连接到第一连杆和第二连杆的沿长度方向的同一端,第二连接件转动连接到第一和第二连杆的沿长度方向的另一端;承载件,转动连接到第一和第二连接件,用于承载物体;至少一个限位杆,一端转动连接到底盘,限位杆的另一端转动连接到承载件,从限位杆的一端的转轴到其另一端的转轴的距离相等;以及位置调节器,转动连接到第一连杆和
柔性底座和搬运机器人.pdf
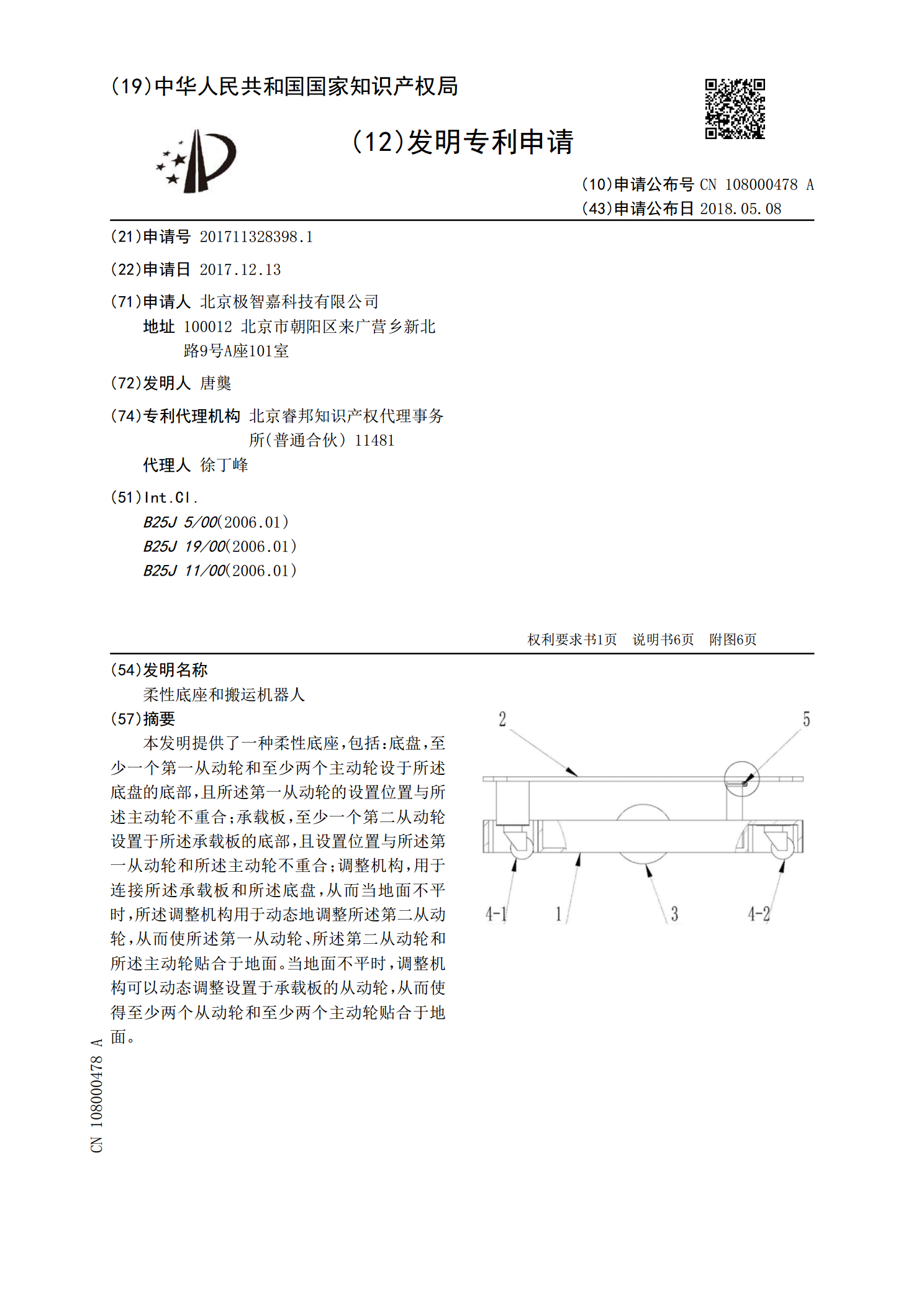
本发明提供了一种柔性底座,包括:底盘,至少一个第一从动轮和至少两个主动轮设于所述底盘的底部,且所述第一从动轮的设置位置与所述主动轮不重合;承载板,至少一个第二从动轮设置于所述承载板的底部,且设置位置与所述第一从动轮和所述主动轮不重合;调整机构,用于连接所述承载板和所述底盘,从而当地面不平时,所述调整机构用于动态地调整所述第二从动轮,从而使所述第一从动轮、所述第二从动轮和所述主动轮贴合于地面。当地面不平时,调整机构可以动态调整设置于承载板的从动轮,从而使得至少两个从动轮和至少两个主动轮贴合于地面。

柔性轴承底座.pdf
一种用于相对于支撑结构安装轴承的柔性轴承底座。本发明的轴承底座组件适应于吸收施加在轴承底座上的力。力转移元件将所施加的力的剪切分量转移给切力吸收器,所述切力吸收器吸收所施加的力的剪切分量并将轴承底座恢复回到原始位置。
发射筒的柔性底座试验系统.pdf
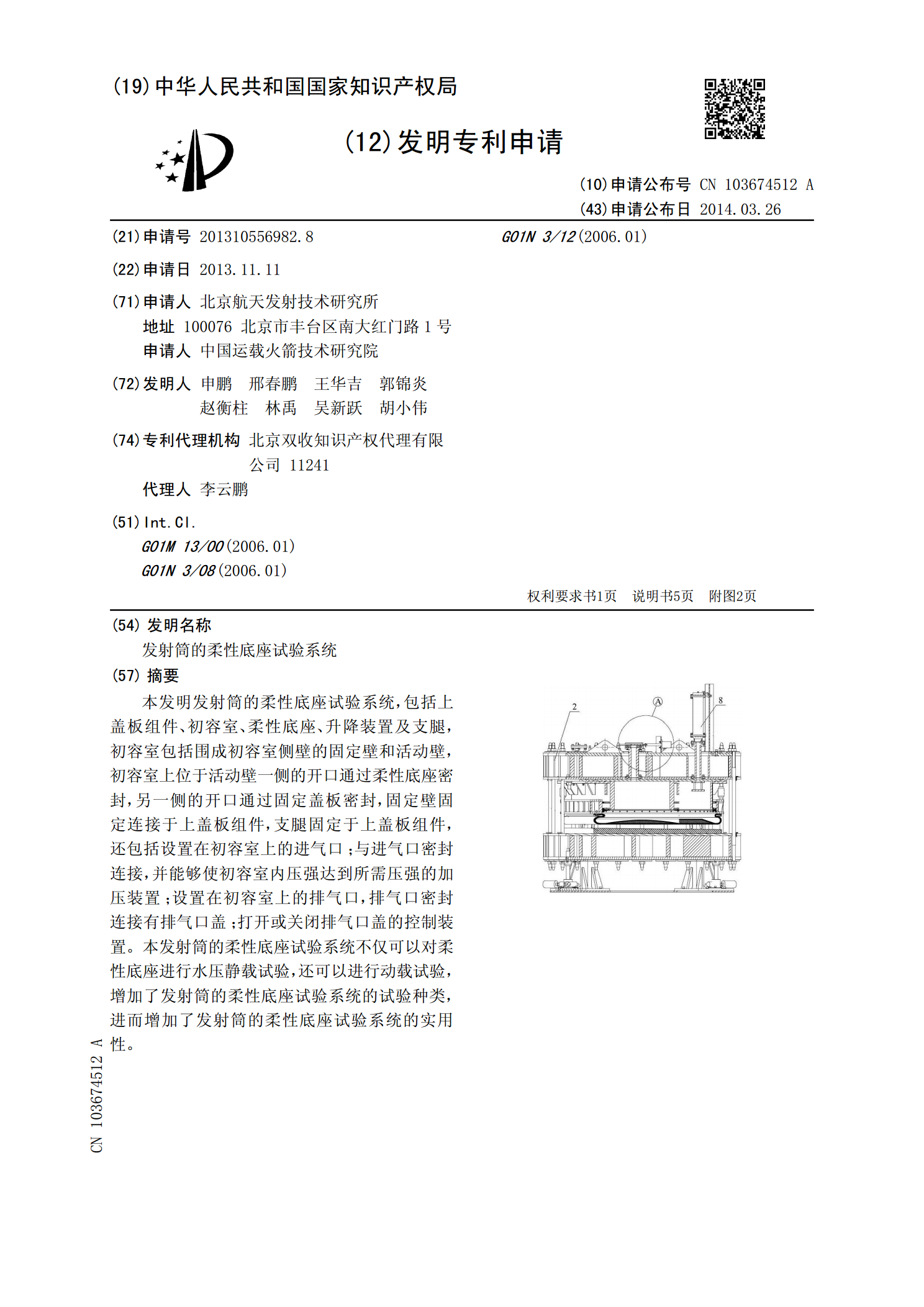
本发明发射筒的柔性底座试验系统,包括上盖板组件、初容室、柔性底座、升降装置及支腿,初容室包括围成初容室侧壁的固定壁和活动壁,初容室上位于活动壁一侧的开口通过柔性底座密封,另一侧的开口通过固定盖板密封,固定壁固定连接于上盖板组件,支腿固定于上盖板组件,还包括设置在初容室上的进气口;与进气口密封连接,并能够使初容室内压强达到所需压强的加压装置;设置在初容室上的排气口,排气口密封连接有排气口盖;打开或关闭排气口盖的控制装置。本发射筒的柔性底座试验系统不仅可以对柔性底座进行水压静载试验,还可以进行动载试验,增加了