
区域轮廓绘制方法及装置.pdf

努力****承悦


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

区域轮廓绘制方法及装置.pdf
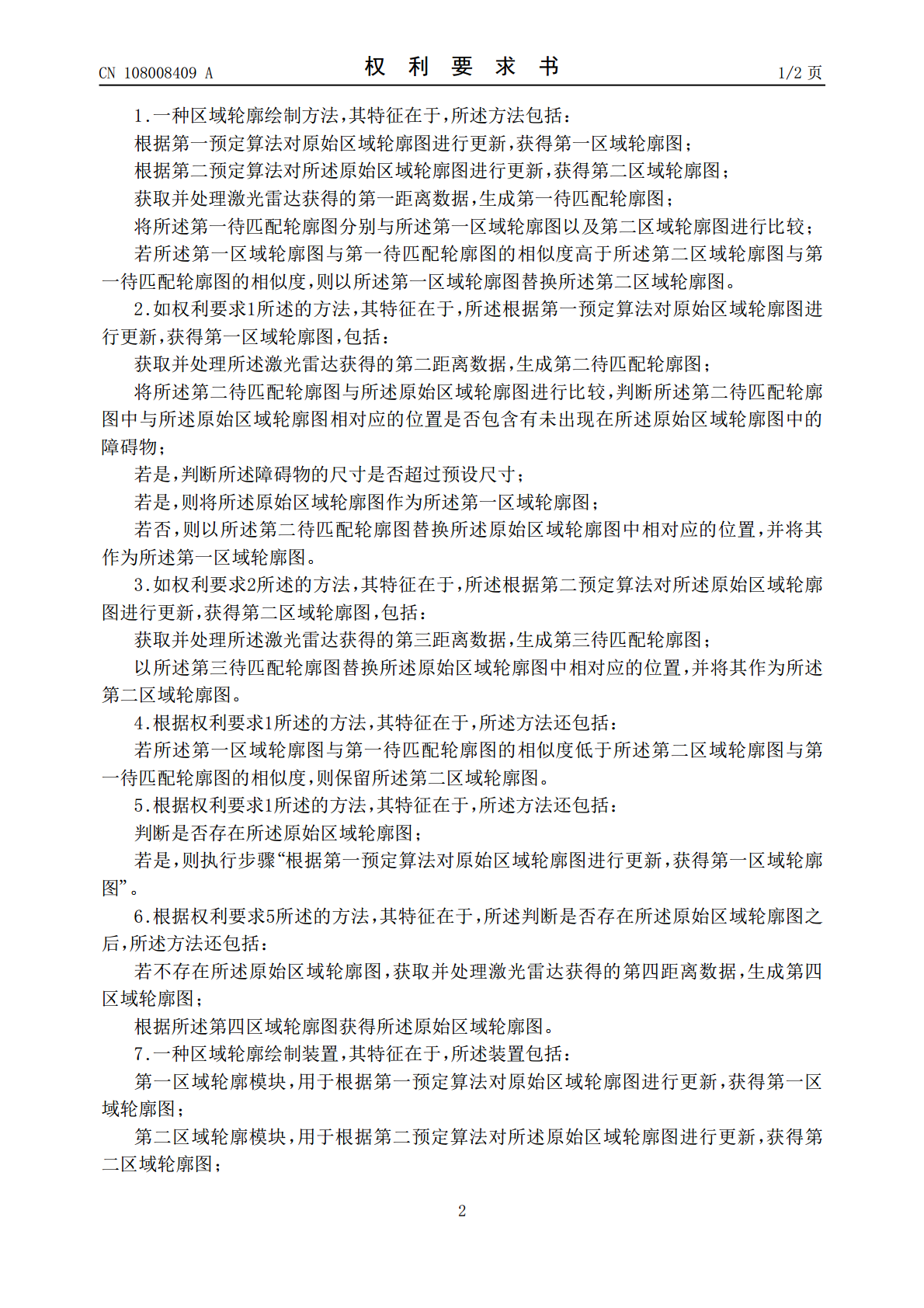
本申请提供了一种区域轮廓绘制方法及装置,根据第一预定算法对原始区域轮廓图进行更新,获得第一区域轮廓图;根据第二预定算法对所述原始区域轮廓图进行更新,获得第二区域轮廓图;获取并处理激光雷达获得的第一距离数据,生成第一待匹配轮廓图;将所述第一待匹配轮廓图分别与所述第一区域轮廓图以及第二区域轮廓图进行比较;若所述第一区域轮廓图与第一待匹配轮廓图的相似度高于所述第二区域轮廓图与第一待匹配轮廓图的相似度,则以所述第一区域轮廓图替换所述第二区域轮廓图。
三维轮廓绘制装置及三维轮廓绘制方法.pdf
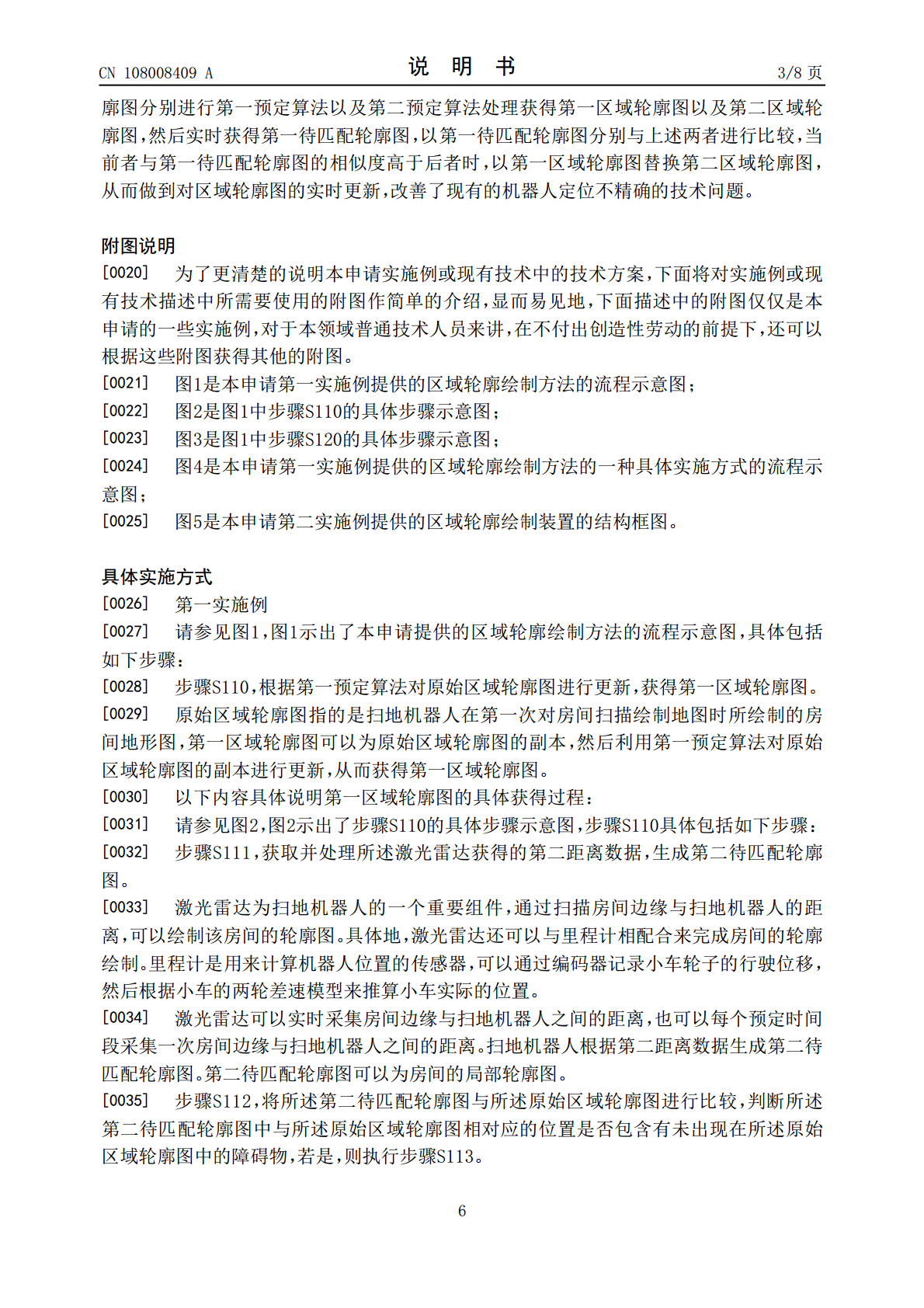
一种三维轮廓绘制方法,包括:初始轮廓绘制步骤,在多个第一面方向图像中的起始图像及结束图像中分别绘制目标结构的轮廓作为第一初始轮廓及第二初始轮廓;第二面方向轮廓绘制步骤,针对多个第二面方向图像的每一个,根据第一初始轮廓及第二初始轮廓绘制目标结构的第二面方向轮廓;第一面方向轮廓生成步骤,根据在第二面方向轮廓绘制步骤中绘制的第二面方向轮廓,在多个第一面方向图像中的起始图像及结束图像之间的各个第一面方向图像中分别生成目标结构的第一面方向轮廓;以及三维轮廓生成步骤,根据第一初始轮廓、第二初始轮廓、第一面方向轮廓、第
绘制表面轮廓的方法和装置.pdf
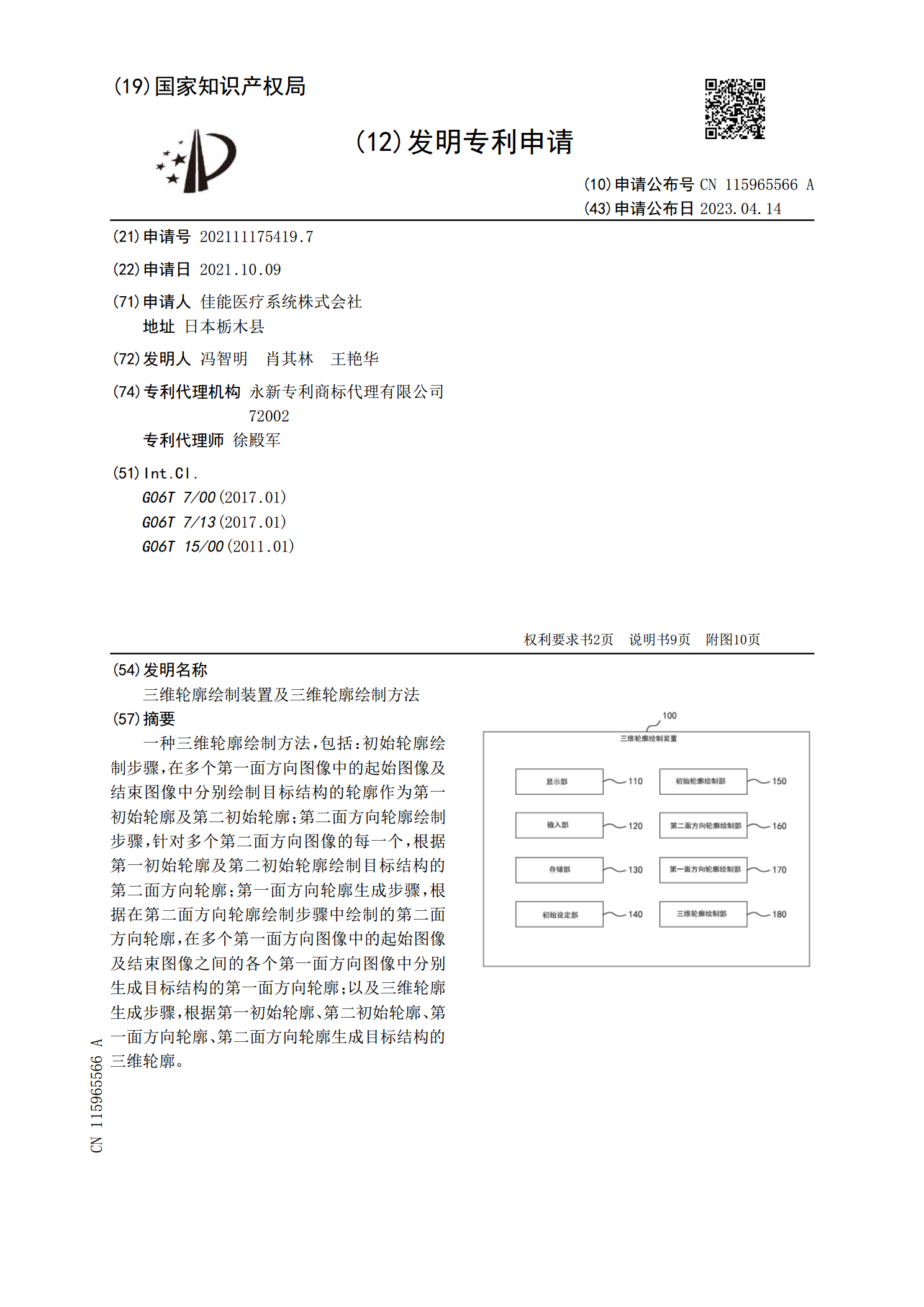
本发明公开一种绘制表面轮廓的方法和装置。该方法包括:沿至少两个方向依次地向目标物体投射狭缝图案光,以获得由目标物体反射的图案图像,根据方向使用图案图像获得高度,获得示出高度的最大变化方向的矢量场,获得与至少两个方向对应的高度的可靠性指数,使用可靠性指数和矢量场获得整合的矢量场,以及,使用整合的矢量场计算目标物体的每个位置的高度。因此,提高了精确度。

一种图像轮廓的绘制方法及装置.pdf
本发明实施例提供了一种图像轮廓的绘制方法及装置。所述方法的具体实施方式包括:当检测到图像轮廓绘制指令时,采用边缘检测算法确定图像轮廓中像素点的坐标;根据图像轮廓中像素点的坐标及当前用户输入的位置和当前用户绘制操作的方向,确定轮廓绘制的起始点以及该起始点对应的绘制方向,并确定该绘制方向上设定数量个像素点;当设定数量个像素点中最后一个像素点是图像轮廓的终止点时,根据保存的目标图像轮廓中的像素点,及起始点和终止点之间的像素点,确定目标图像轮廓,否则,将设定数量个像素点作为目标图像轮廓中的像素点并保存,将最后一个

海冰区域轮廓线检测方法及装置.pdf
本发明实施例提供一种海冰区域轮廓线检测方法及装置,该方法包括:在海面上沿目标方向发射脉冲后,接收与脉冲对应的脉冲回波序列;脉冲回波序列包括一系列采样点及每个采样点的回波幅度;选取采样点中回波幅度的空间均匀性剧烈变化的目标采样点,并将目标采样点作为海冰区域的对应于目标方向的轮廓点;通过连接对应于不同的目标方向的轮廓点,获得海冰区域的轮廓线。本发明实施例提供通过选取采样点中的目标采样点,利用位于海水区域与海冰区域之间交界区域的采样点对应的回波幅度会出现明显的空间均匀性剧烈变化的特点,获得海冰区域的轮廓线,能够