
致动器模块.pdf

飞飙****ng

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
致动器模块.pdf
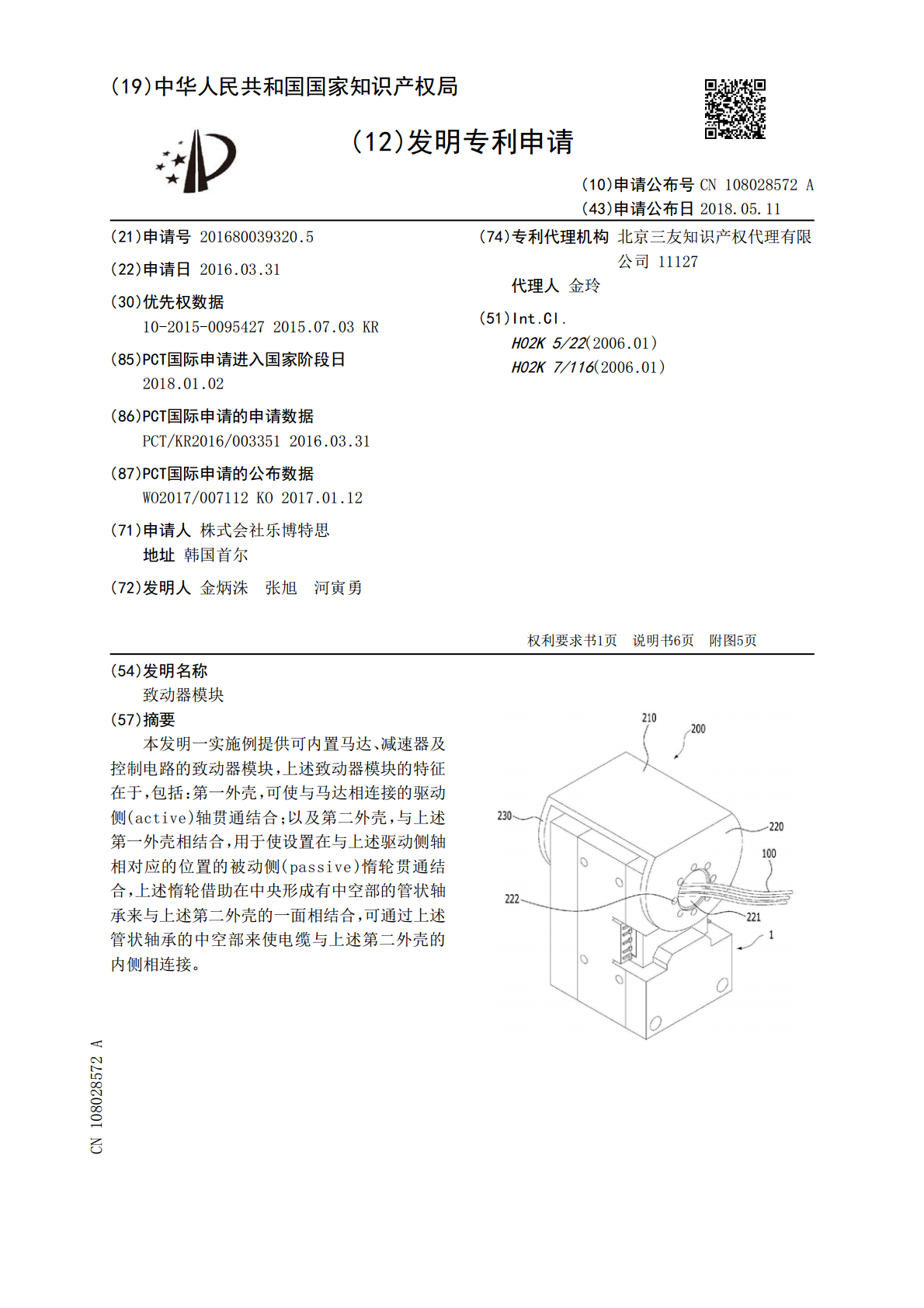
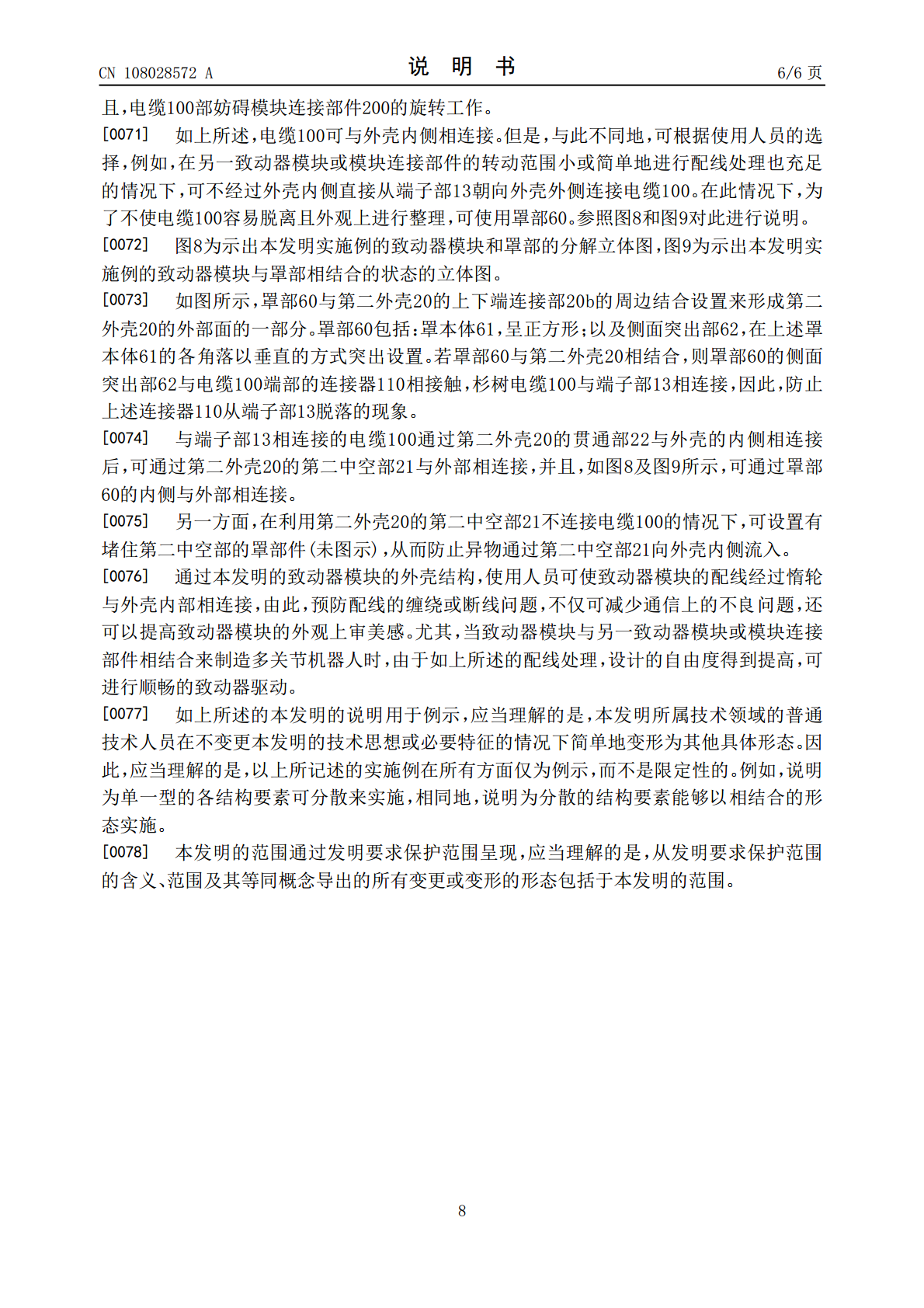
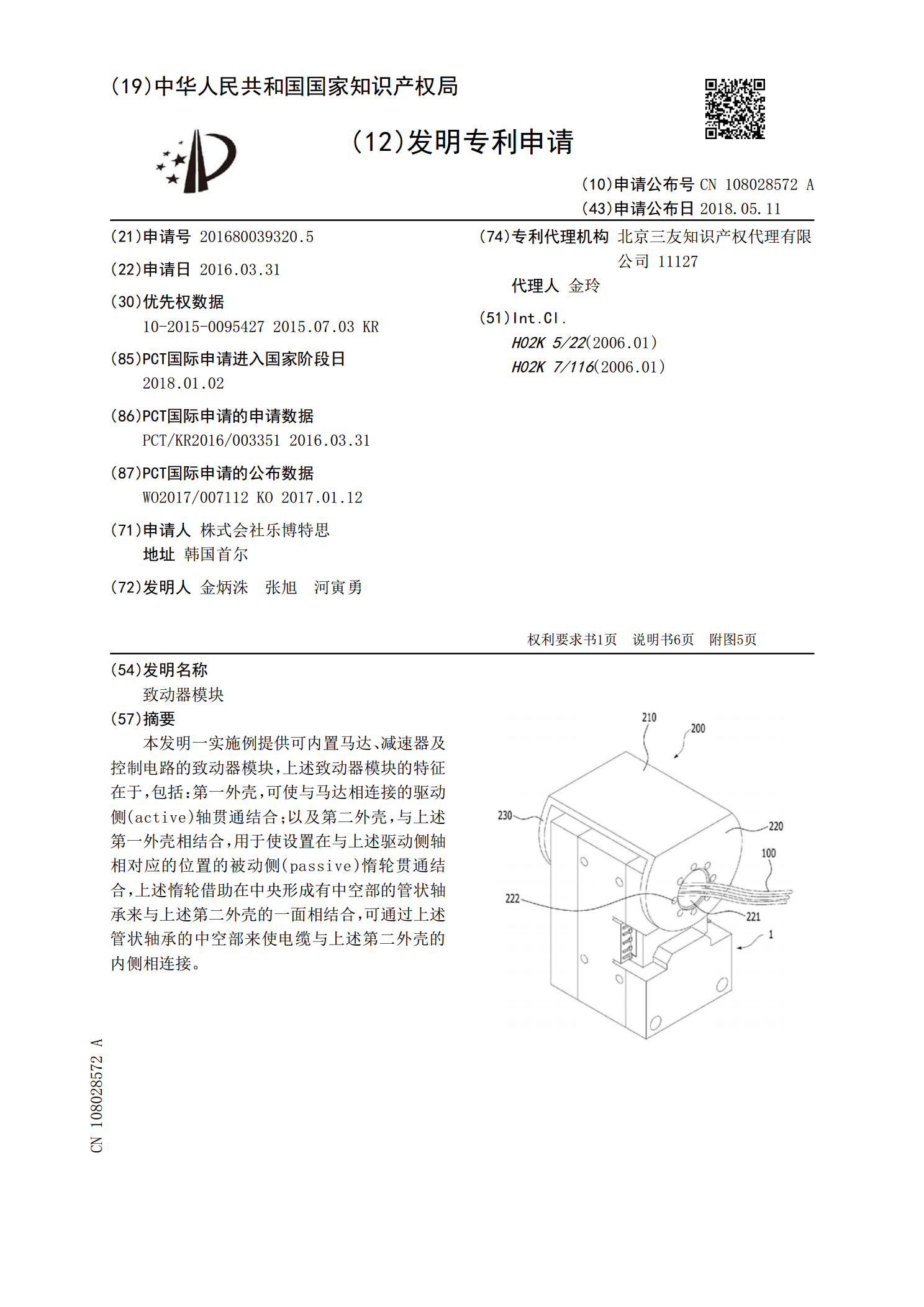
本发明一实施例提供可内置马达、减速器及控制电路的致动器模块,上述致动器模块的特征在于,包括:第一外壳,可使与马达相连接的驱动侧(active)轴贯通结合;以及第二外壳,与上述第一外壳相结合,用于使设置在与上述驱动侧轴相对应的位置的被动侧(passive)惰轮贯通结合,上述惰轮借助在中央形成有中空部的管状轴承来与上述第二外壳的一面相结合,可通过上述管状轴承的中空部来使电缆与上述第二外壳的内侧相连接。

相机致动器和包括相机致动器的相机模块.pdf
本发明的实施方式提供了一种相机致动器,该相机致动器包括:壳体;联接至壳体的第一构件;包括光学构件的动子;设置在第一构件中的第一磁性本体;设置在动子中的第二磁性本体;以及用于对动子的倾斜进行导引的倾斜导引部分,其中,动子包括联接至光学构件的保持器和联接至保持器的第二构件,并且倾斜导引部分通过第一磁性本体与第二磁性本体之间的排斥力而紧密地贴附至第一构件和保持器。

半中空型致动器模块.pdf
本发明涉及一种半中空型致动器模块,更详细地,涉及如下的半中空型致动器模块,即,在内置有马达及减速器的致动器模块中,通过改善配线(电缆)的连接结构来与另一致动器模块或模块连接部件等相结合,从而解决配线的缠绕问题。
相机致动器及包括其的相机模块.pdf
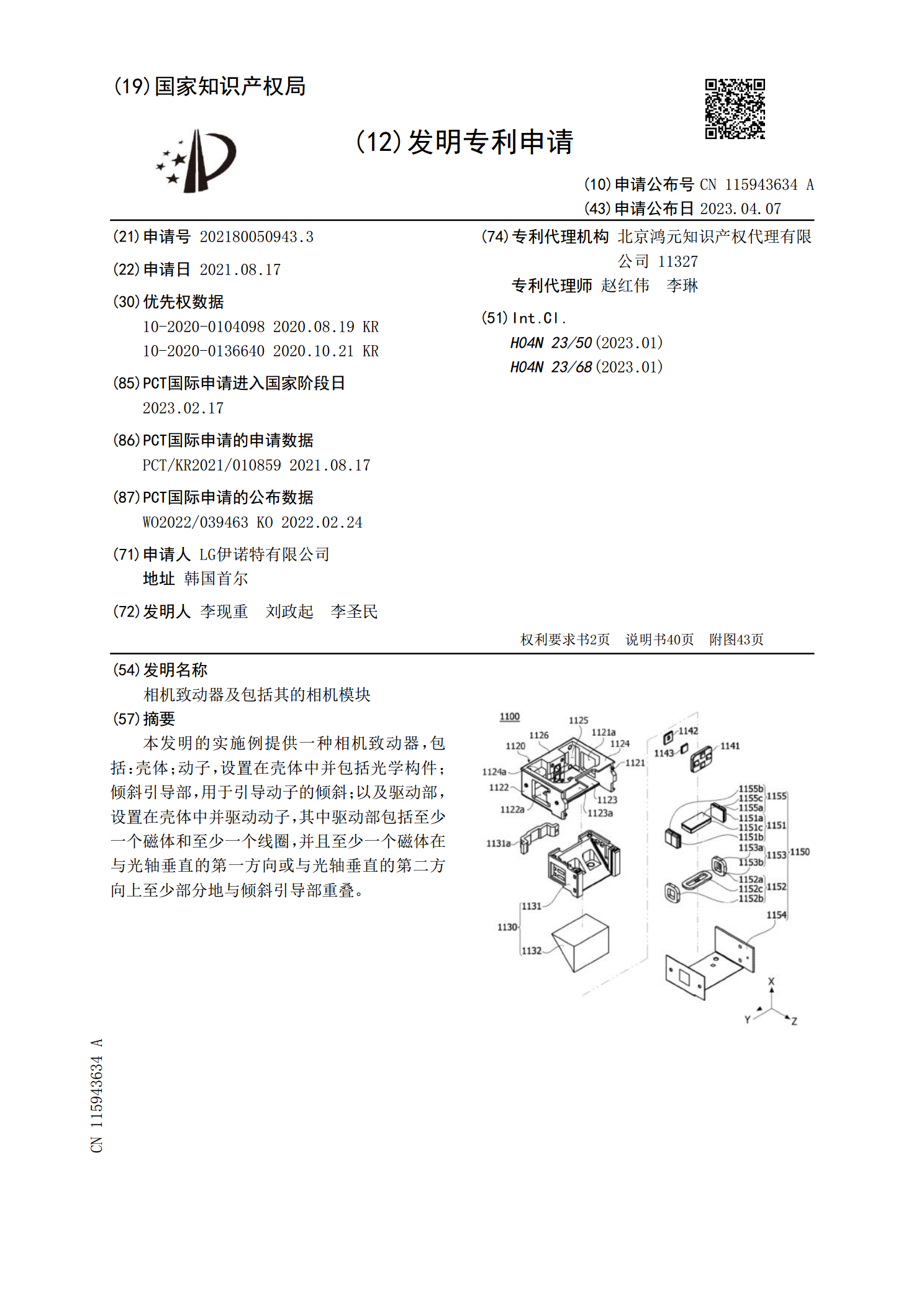
本发明的实施例提供一种相机致动器,包括:壳体;动子,设置在壳体中并包括光学构件;倾斜引导部,用于引导动子的倾斜;以及驱动部,设置在壳体中并驱动动子,其中驱动部包括至少一个磁体和至少一个线圈,并且至少一个磁体在与光轴垂直的第一方向或与光轴垂直的第二方向上至少部分地与倾斜引导部重叠。
相机致动器和包括其的相机模块.pdf
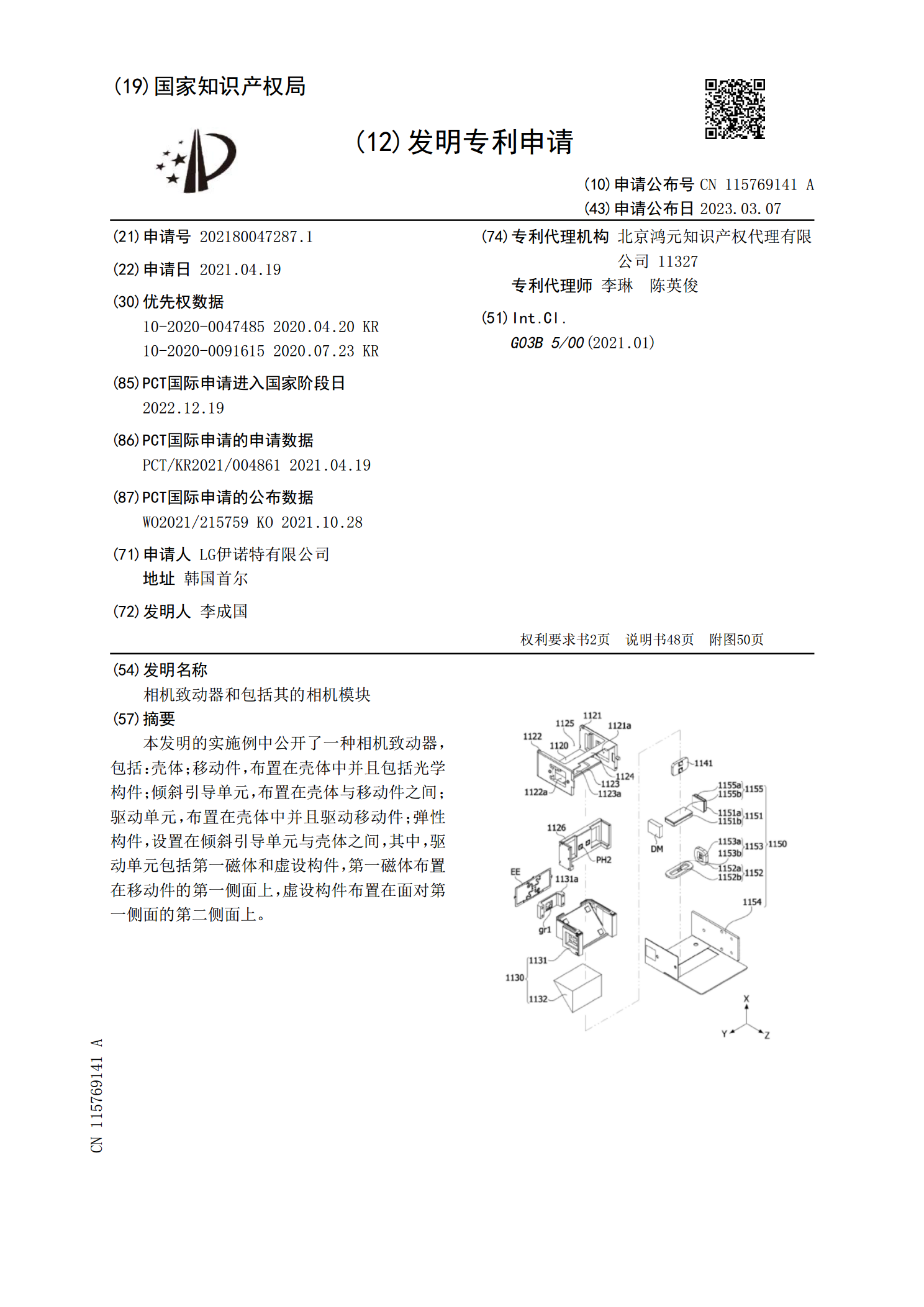
本发明的实施例中公开了一种相机致动器,包括:壳体;移动件,布置在壳体中并且包括光学构件;倾斜引导单元,布置在壳体与移动件之间;驱动单元,布置在壳体中并且驱动移动件;弹性构件,设置在倾斜引导单元与壳体之间,其中,驱动单元包括第一磁体和虚设构件,第一磁体布置在移动件的第一侧面上,虚设构件布置在面对第一侧面的第二侧面上。