
一种异步双目相机的深度估计方法及系统.pdf

努力****恨风

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种异步双目相机的深度估计方法及系统.pdf
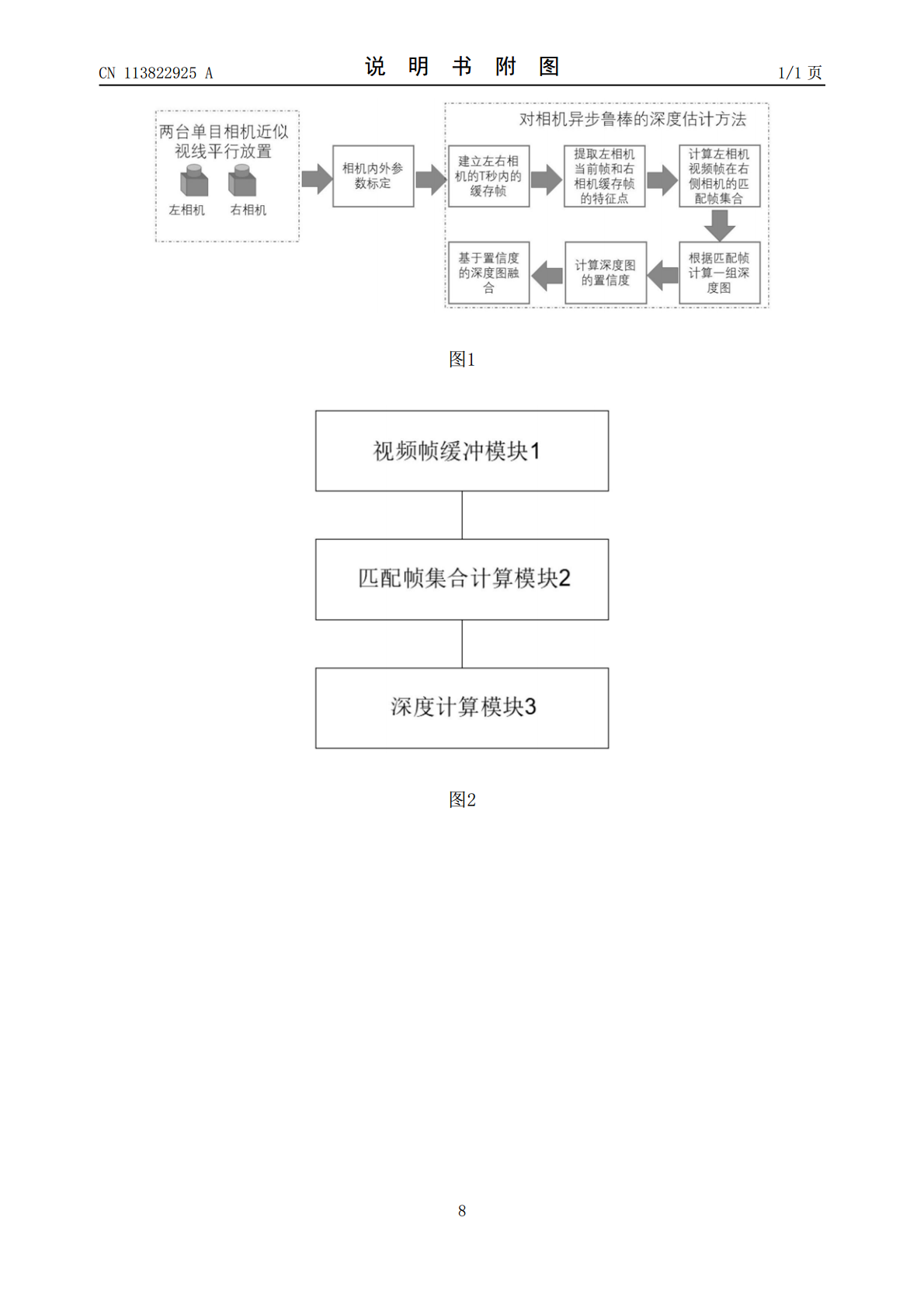
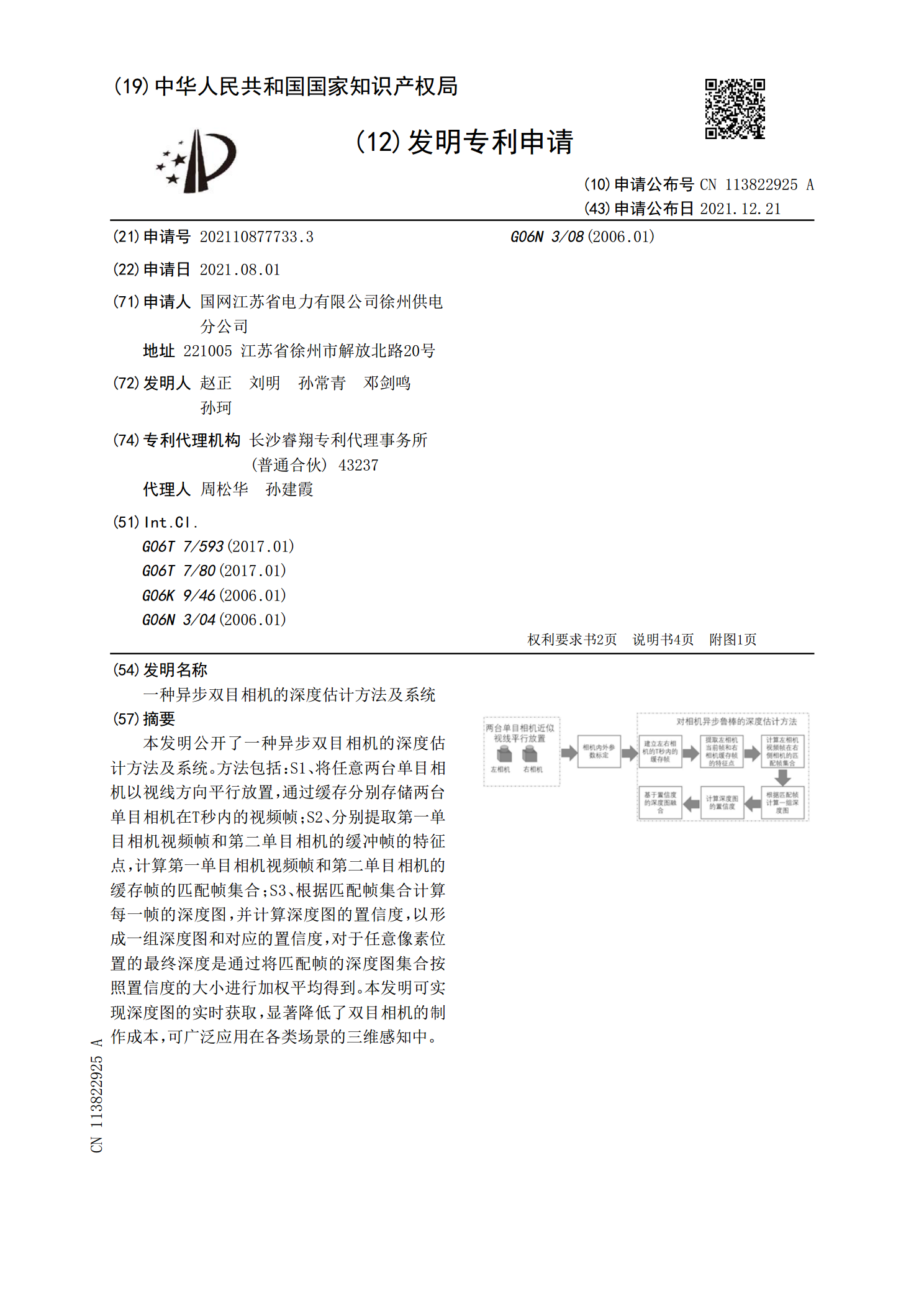
本发明公开了一种异步双目相机的深度估计方法及系统。方法包括:S1、将任意两台单目相机以视线方向平行放置,通过缓存分别存储两台单目相机在T秒内的视频帧;S2、分别提取第一单目相机视频帧和第二单目相机的缓冲帧的特征点,计算第一单目相机视频帧和第二单目相机的缓存帧的匹配帧集合;S3、根据匹配帧集合计算每一帧的深度图,并计算深度图的置信度,以形成一组深度图和对应的置信度,对于任意像素位置的最终深度是通过将匹配帧的深度图集合按照置信度的大小进行加权平均得到。本发明可实现深度图的实时获取,显著降低了双目相机的制作成本
基于双目RGB-D相机深度轮廓估计方法.pdf
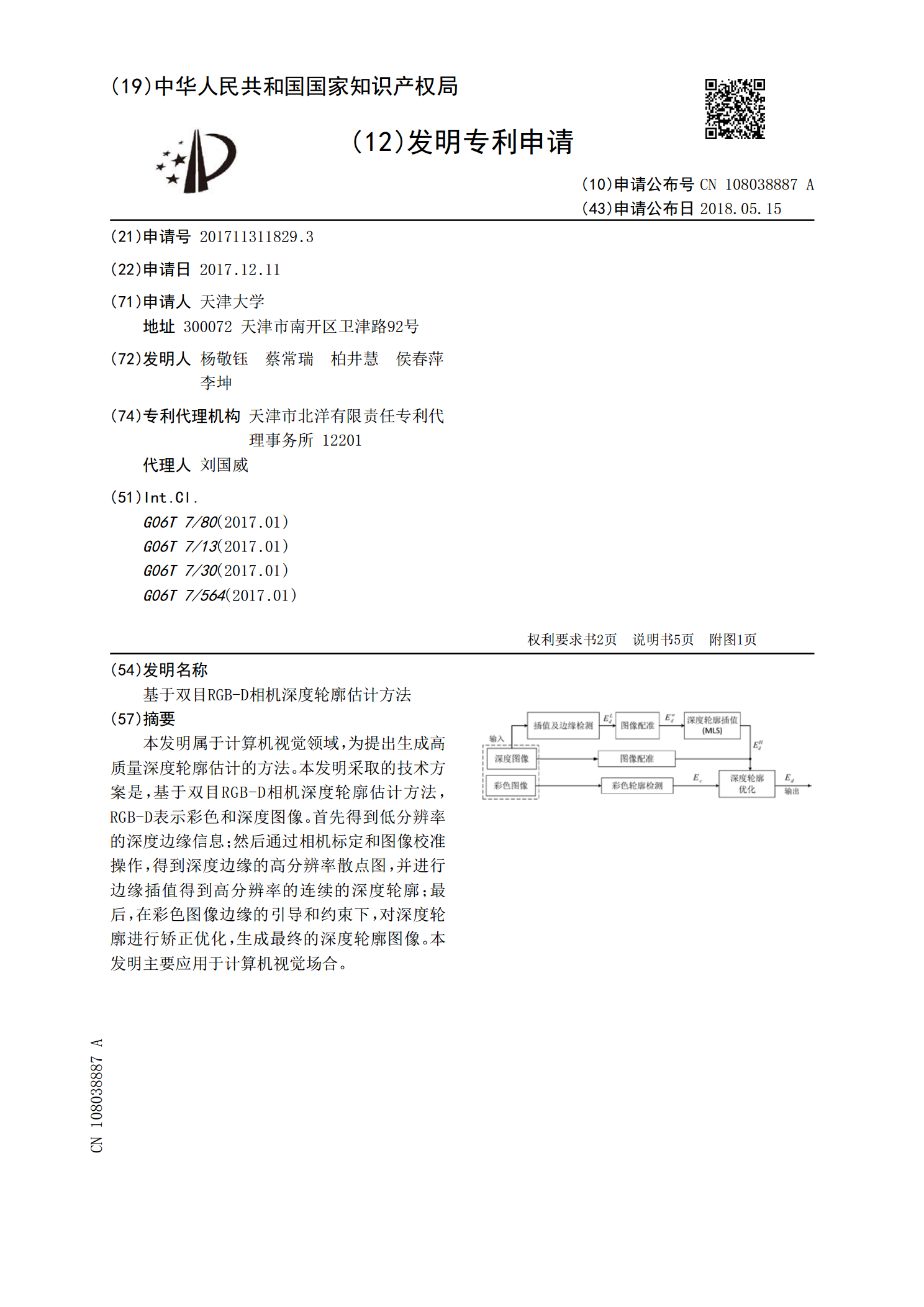
本发明属于计算机视觉领域,为提出生成高质量深度轮廓估计的方法。本发明采取的技术方案是,基于双目RGB‑D相机深度轮廓估计方法,RGB‑D表示彩色和深度图像。首先得到低分辨率的深度边缘信息;然后通过相机标定和图像校准操作,得到深度边缘的高分辨率散点图,并进行边缘插值得到高分辨率的连续的深度轮廓;最后,在彩色图像边缘的引导和约束下,对深度轮廓进行矫正优化,生成最终的深度轮廓图像。本发明主要应用于计算机视觉场合。
融合激光雷达和双目相机的深度估计方法、装置及设备.pdf
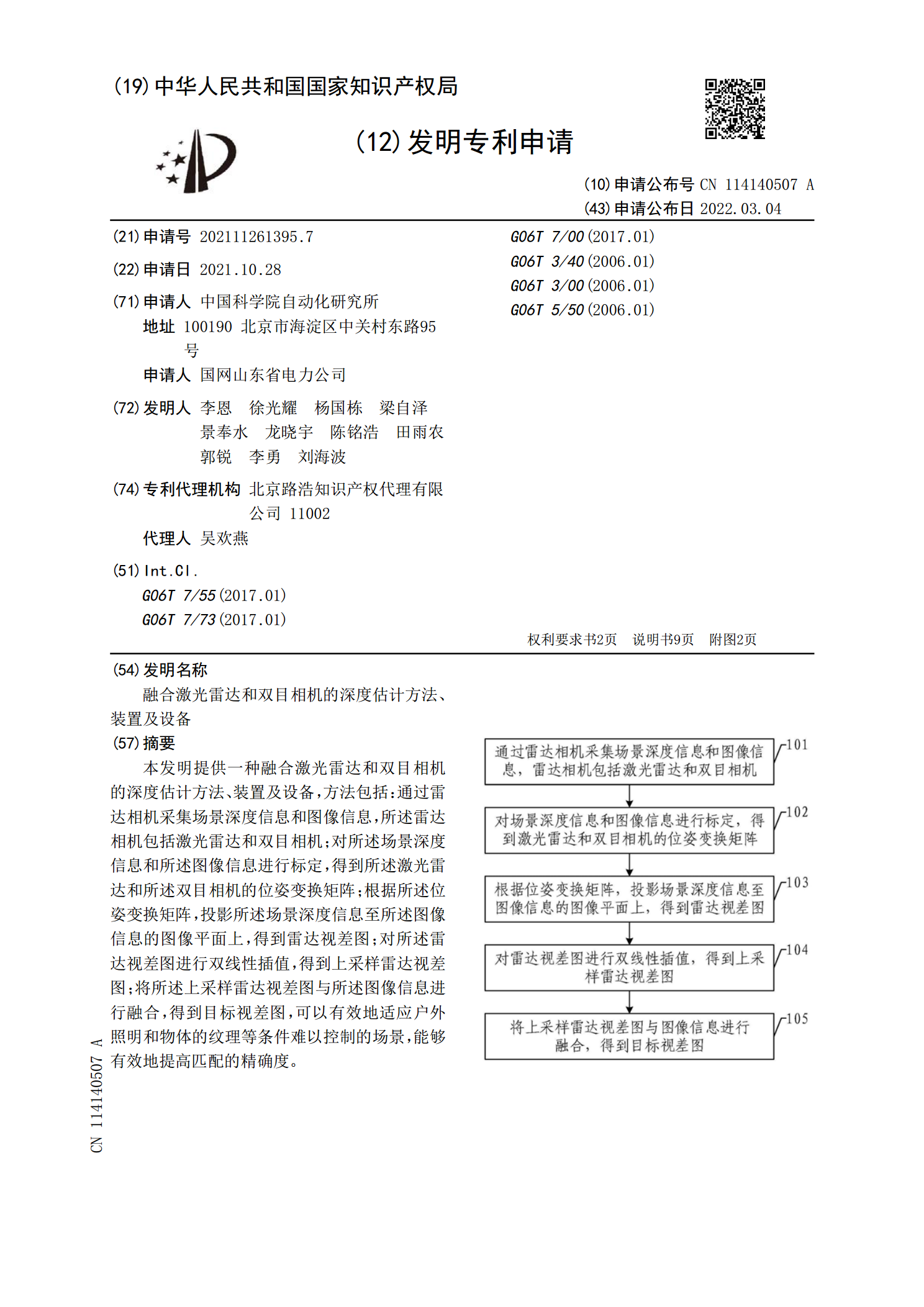
本发明提供一种融合激光雷达和双目相机的深度估计方法、装置及设备,方法包括:通过雷达相机采集场景深度信息和图像信息,所述雷达相机包括激光雷达和双目相机;对所述场景深度信息和所述图像信息进行标定,得到所述激光雷达和所述双目相机的位姿变换矩阵;根据所述位姿变换矩阵,投影所述场景深度信息至所述图像信息的图像平面上,得到雷达视差图;对所述雷达视差图进行双线性插值,得到上采样雷达视差图;将所述上采样雷达视差图与所述图像信息进行融合,得到目标视差图,可以有效地适应户外照明和物体的纹理等条件难以控制的场景,能够有效地提高

双目相机的立体标定方法、装置、系统及双目相机.pdf
本申请实施例公开了一种双目相机的立体标定方法、装置、系统及双目相机,属于计算机视觉技术领域。本方案中标定装置通过反向补光、漫反射面反射光线和热量,且保证散热,使标定板上的光线和热量均匀稳定,这样拍摄得到的可见光图像和热红外图像清晰。本方案中的立体标定方法,先将两台相机的成像规格统一,这样后续的立体标定能够准确有效。另外,在本方案中还对沿光轴方向的平移分量作减小处理,来确定两台相机各自的旋转量,后续基于确定的旋转量旋转校正图像后,能够保留更多的图像,保证了图像的可用性,也即保证了立体标定的可靠性。在将该立体
一种基于伪标签融合的双目深度估计方法.pdf
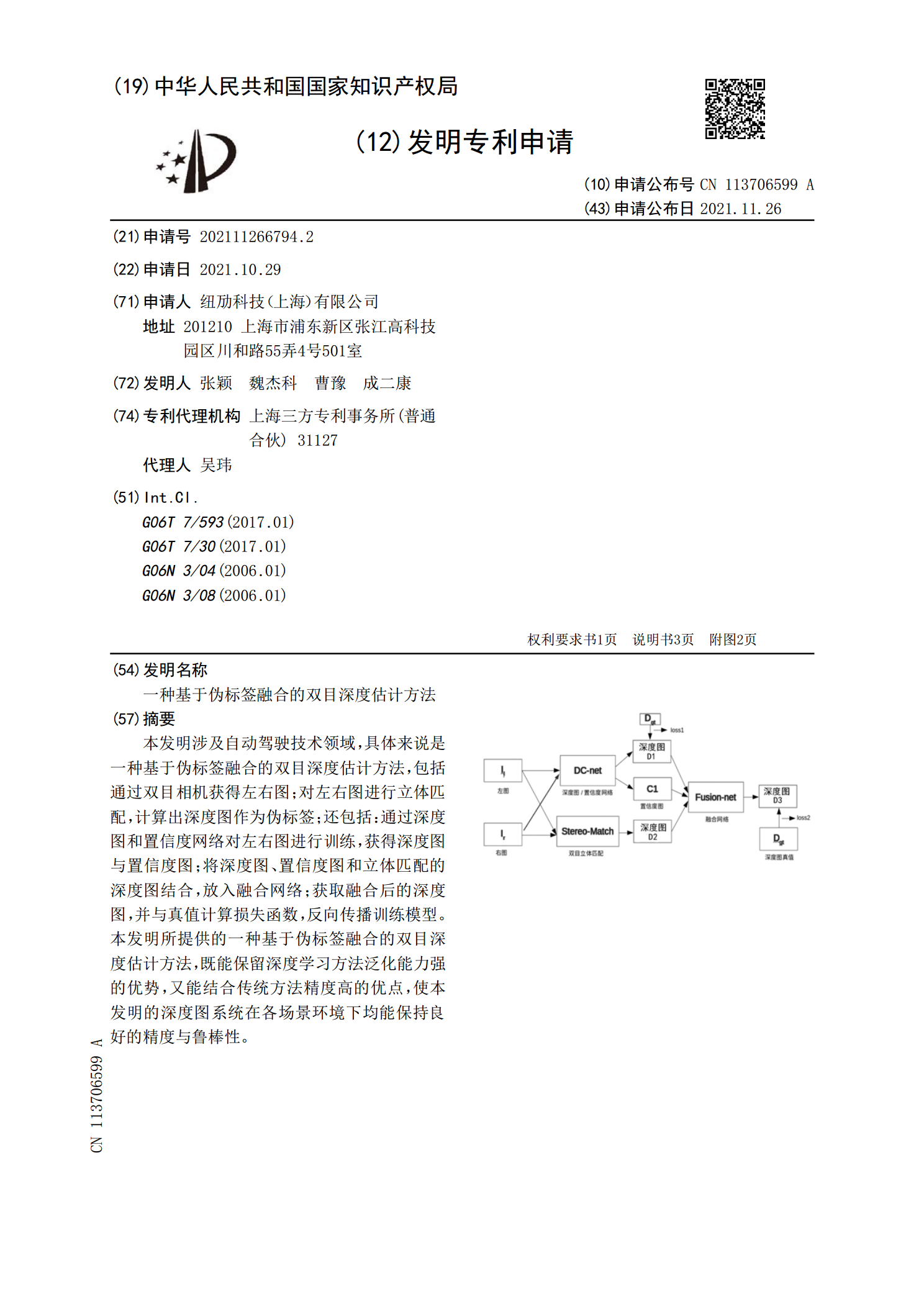
本发明涉及自动驾驶技术领域,具体来说是一种基于伪标签融合的双目深度估计方法,包括通过双目相机获得左右图;对左右图进行立体匹配,计算出深度图作为伪标签;还包括:通过深度图和置信度网络对左右图进行训练,获得深度图与置信度图;将深度图、置信度图和立体匹配的深度图结合,放入融合网络;获取融合后的深度图,并与真值计算损失函数,反向传播训练模型。本发明所提供的一种基于伪标签融合的双目深度估计方法,既能保留深度学习方法泛化能力强的优势,又能结合传统方法精度高的优点,使本发明的深度图系统在各场景环境下均能保持良好的精度与