
调整圆锥齿轮啮合间隙的方法.pdf

是你****芹呀

1/8
2/8
3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
调整圆锥齿轮啮合间隙的方法.pdf
本发明属于调整齿轮啮合间隙的技术领域,具体地说是一种调整圆锥齿轮啮合间隙的方法。所述方法包括以下几个步骤:1)将圆锥齿轮I通过平键与转轴连接、且与圆锥齿轮II啮合,将圆锥齿轮I和圆锥齿轮II相互靠近,使其啮合间隙为零,同时使平键的后端与轴键槽的配合间隙调整为零;2)通过顶丝将圆锥齿轮I和平键连接;3)在平键后端半圆柱面去掉设定的厚度;4)重新组装平键、圆锥齿轮I及转轴,从而获得圆锥齿轮I和圆锥齿轮II之间的准确啮合间隙。本发明实现了在无安装基准的情况下,精确调整圆锥齿轮的啮合间隙。

齿轮啮合间隙调整工具及调整方法.pdf
本发明提供了一种齿轮啮合间隙调整工具,包括:连接板、垫板和调节螺钉;所述连接板一端安装有第一套管,另一端安装有第二套管,所述调节螺钉穿过所述垫板后径向旋入所述第二套管。本发明还提供了一种利用上述调整工具进行齿轮啮合间隙调整的方法。本发明具有效率高、精度高的优点。
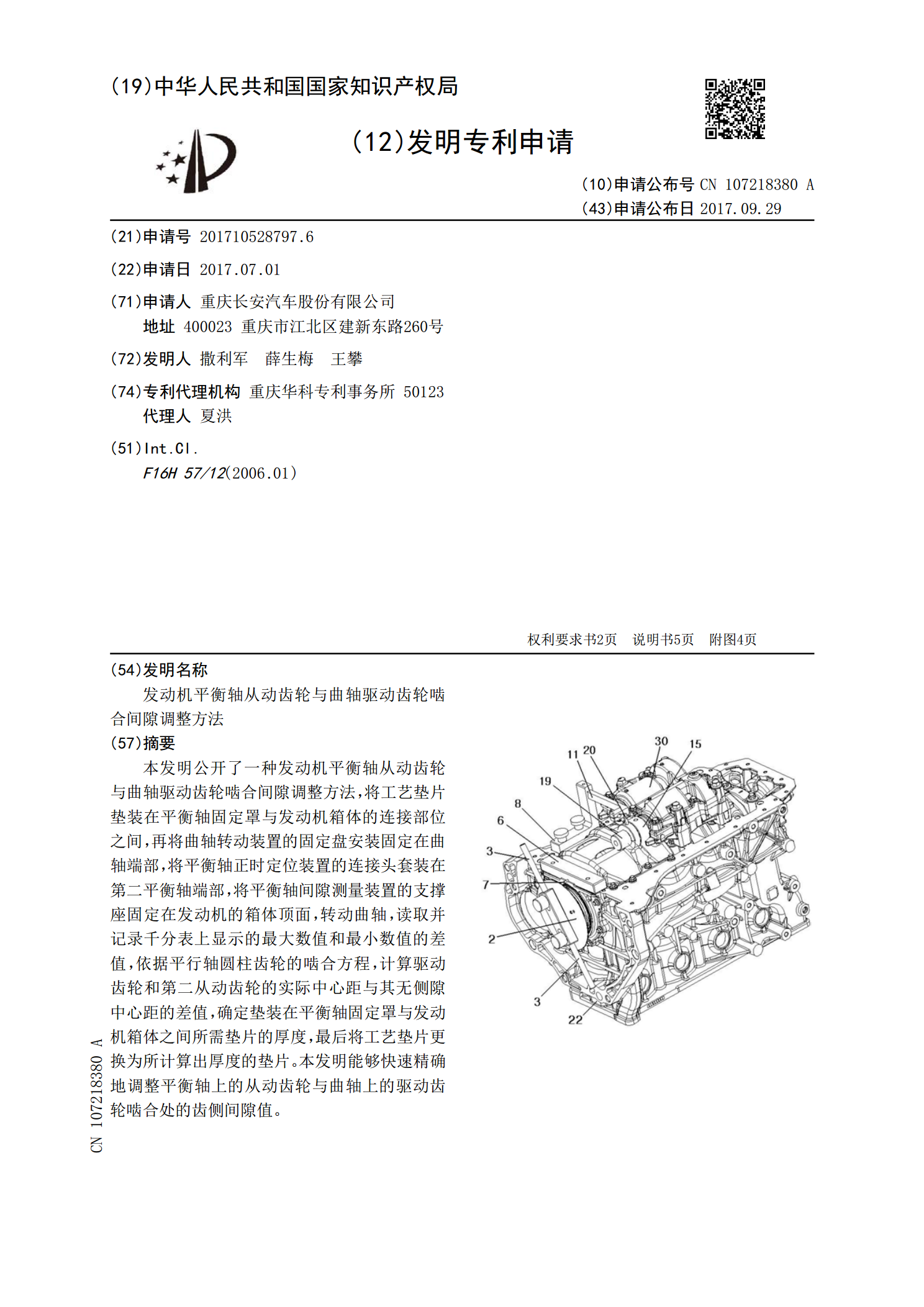
发动机平衡轴从动齿轮与曲轴驱动齿轮啮合间隙调整方法.pdf
本发明公开了一种发动机平衡轴从动齿轮与曲轴驱动齿轮啮合间隙调整方法,将工艺垫片垫装在平衡轴固定罩与发动机箱体的连接部位之间,再将曲轴转动装置的固定盘安装固定在曲轴端部,将平衡轴正时定位装置的连接头套装在第二平衡轴端部,将平衡轴间隙测量装置的支撑座固定在发动机的箱体顶面,转动曲轴,读取并记录千分表上显示的最大数值和最小数值的差值,依据平行轴圆柱齿轮的啮合方程,计算驱动齿轮和第二从动齿轮的实际中心距与其无侧隙中心距的差值,确定垫装在平衡轴固定罩与发动机箱体之间所需垫片的厚度,最后将工艺垫片更换为所计算出厚度的

齿轮啮合法向间隙检测方法.pdf
本发明公开了一种齿轮啮合法向间隙检测方法,涉及机械制造技术领域;这种齿轮啮合法向间隙检测方法,将齿轮装在齿轮测量芯轴上、将齿轮测量芯轴连同齿轮分别放在测量装置的支撑板的半圆形凹槽中,使二对齿轮处于啮合状态、固定其中一根齿轮测量芯轴,轻轻地转动第一齿轮测量芯轴,使第一齿轮的齿面碰到第二齿轮的齿面,此时,测量百分表得到读数一;再使第一齿轮的齿面碰到第二齿轮的另一个齿面,测量百分表得到读数二,将读数一与读数二相减即得到第一齿轮与第二齿轮的法向间隙数值。与现有技术相比,本发明可以解决现有齿轮啮合法向间隙测量既费时
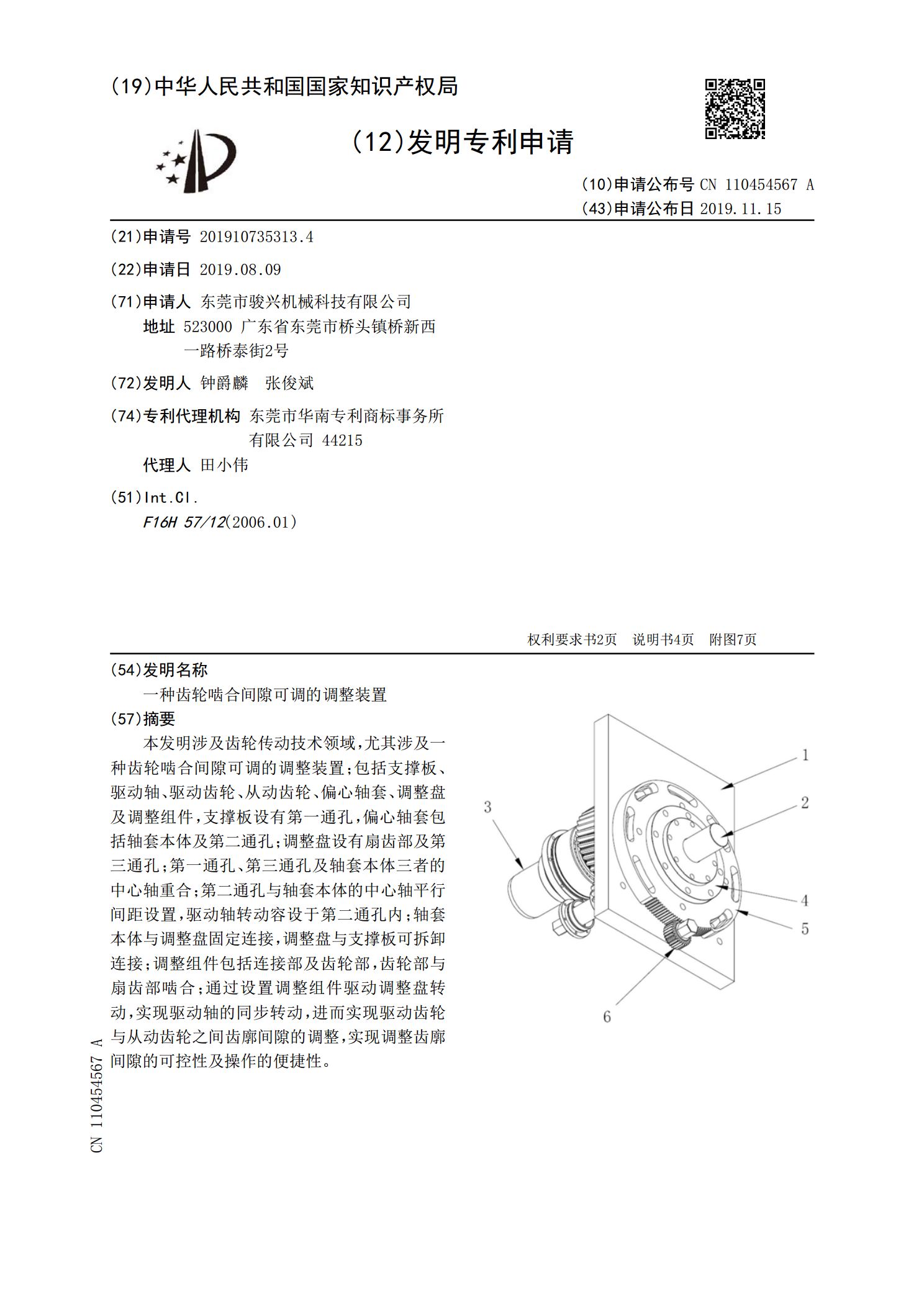
一种齿轮啮合间隙可调的调整装置.pdf
本发明涉及齿轮传动技术领域,尤其涉及一种齿轮啮合间隙可调的调整装置;包括支撑板、驱动轴、驱动齿轮、从动齿轮、偏心轴套、调整盘及调整组件,支撑板设有第一通孔,偏心轴套包括轴套本体及第二通孔;调整盘设有扇齿部及第三通孔;第一通孔、第三通孔及轴套本体三者的中心轴重合;第二通孔与轴套本体的中心轴平行间距设置,驱动轴转动容设于第二通孔内;轴套本体与调整盘固定连接,调整盘与支撑板可拆卸连接;调整组件包括连接部及齿轮部,齿轮部与扇齿部啮合;通过设置调整组件驱动调整盘转动,实现驱动轴的同步转动,进而实现驱动齿轮与从动齿轮