
一种紧急制动工况下滑移率跟踪控制方法.pdf

志玉****爱啊


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种紧急制动工况下滑移率跟踪控制方法.pdf
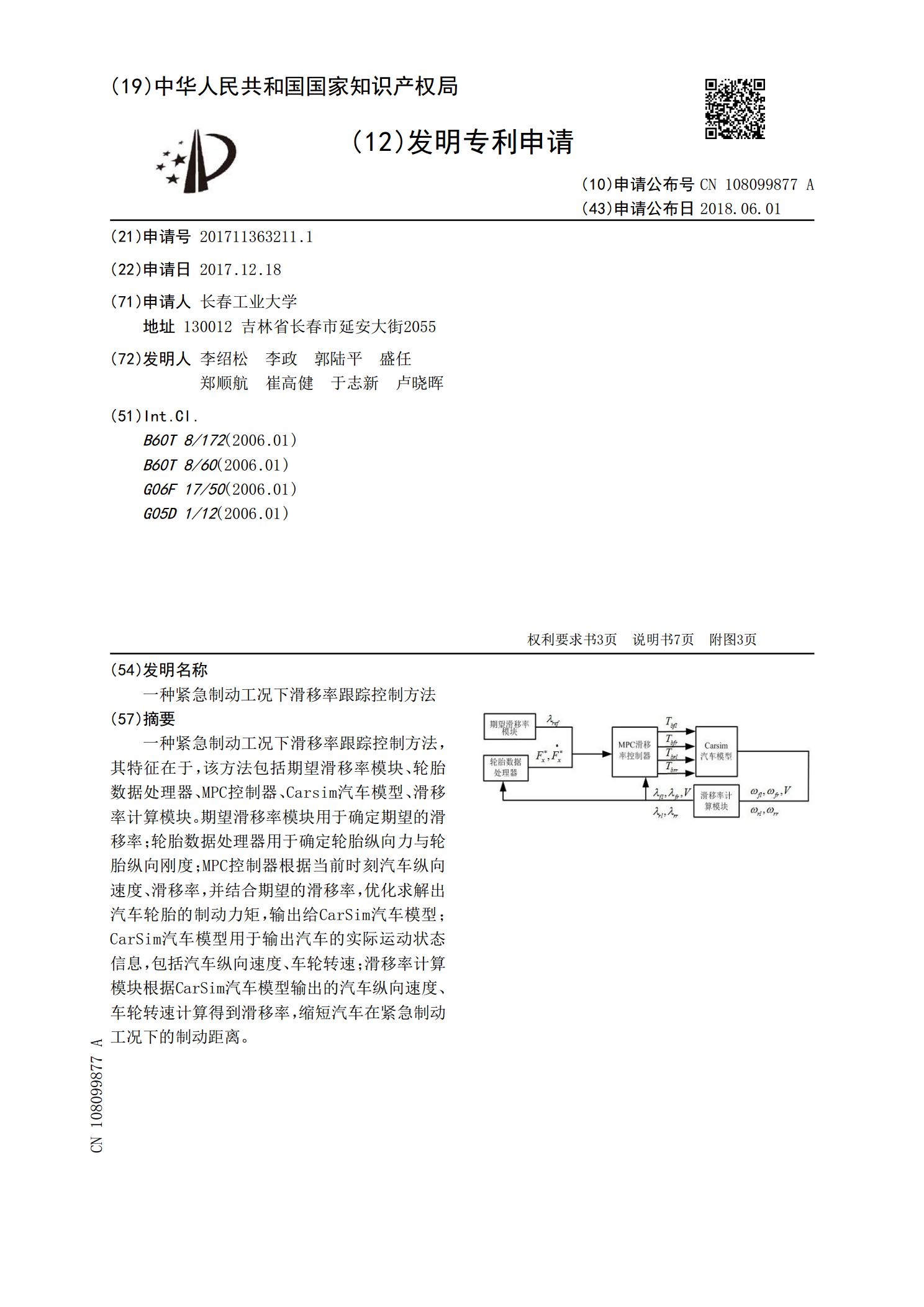
一种紧急制动工况下滑移率跟踪控制方法,其特征在于,该方法包括期望滑移率模块、轮胎数据处理器、MPC控制器、Carsim汽车模型、滑移率计算模块。期望滑移率模块用于确定期望的滑移率;轮胎数据处理器用于确定轮胎纵向力与轮胎纵向刚度;MPC控制器根据当前时刻汽车纵向速度、滑移率,并结合期望的滑移率,优化求解出汽车轮胎的制动力矩,输出给CarSim汽车模型;CarSim汽车模型用于输出汽车的实际运动状态信息,包括汽车纵向速度、车轮转速;滑移率计算模块根据CarSim汽车模型输出的汽车纵向速度、车轮转速计算得到滑移
一种基于线性时变的滑移率跟踪控制方法.pdf
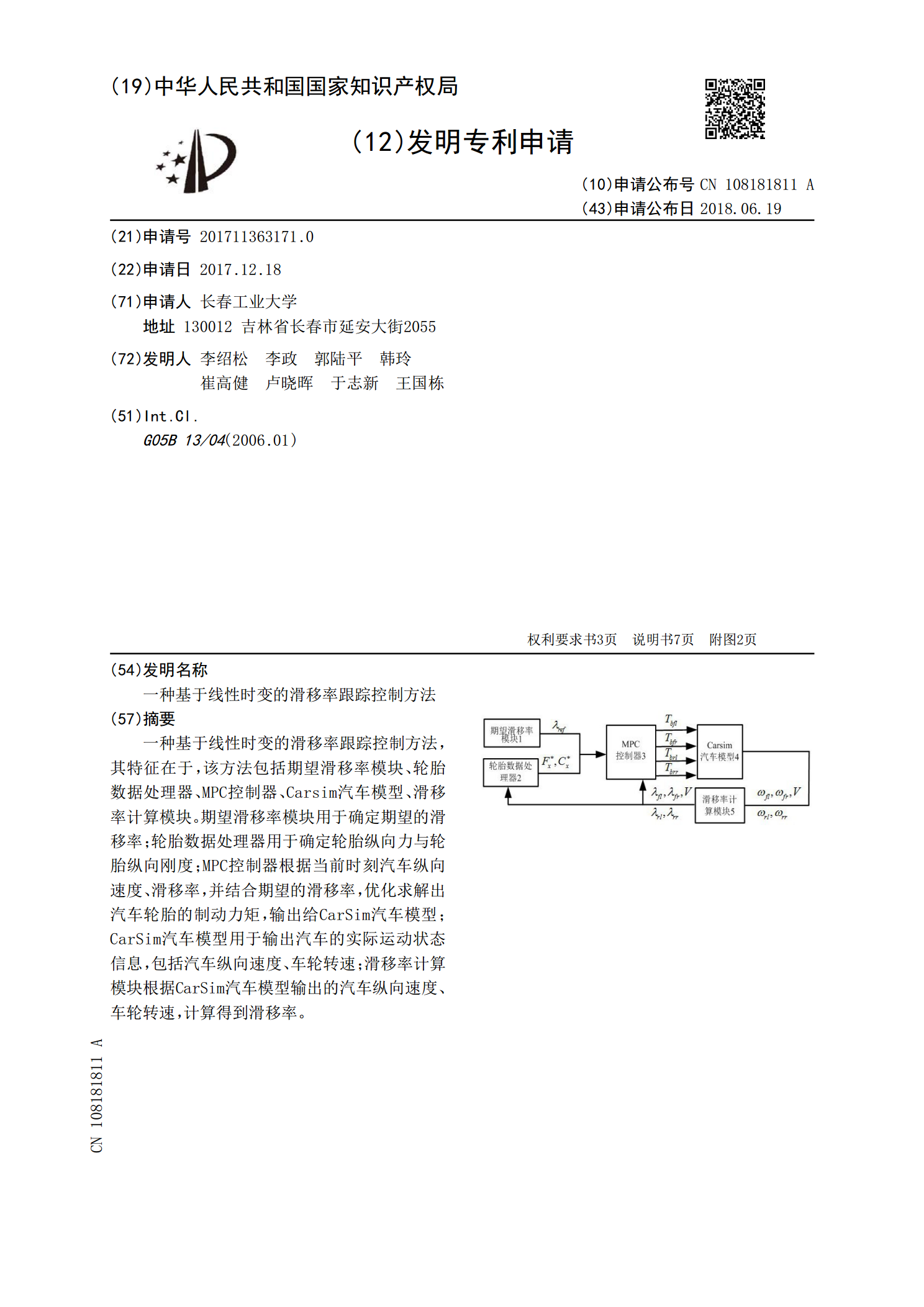
一种基于线性时变的滑移率跟踪控制方法,其特征在于,该方法包括期望滑移率模块、轮胎数据处理器、MPC控制器、Carsim汽车模型、滑移率计算模块。期望滑移率模块用于确定期望的滑移率;轮胎数据处理器用于确定轮胎纵向力与轮胎纵向刚度;MPC控制器根据当前时刻汽车纵向速度、滑移率,并结合期望的滑移率,优化求解出汽车轮胎的制动力矩,输出给CarSim汽车模型;CarSim汽车模型用于输出汽车的实际运动状态信息,包括汽车纵向速度、车轮转速;滑移率计算模块根据CarSim汽车模型输出的汽车纵向速度、车轮转速,计算得到滑
一种智能汽车极限工况下路径跟踪与稳定控制方法.pdf
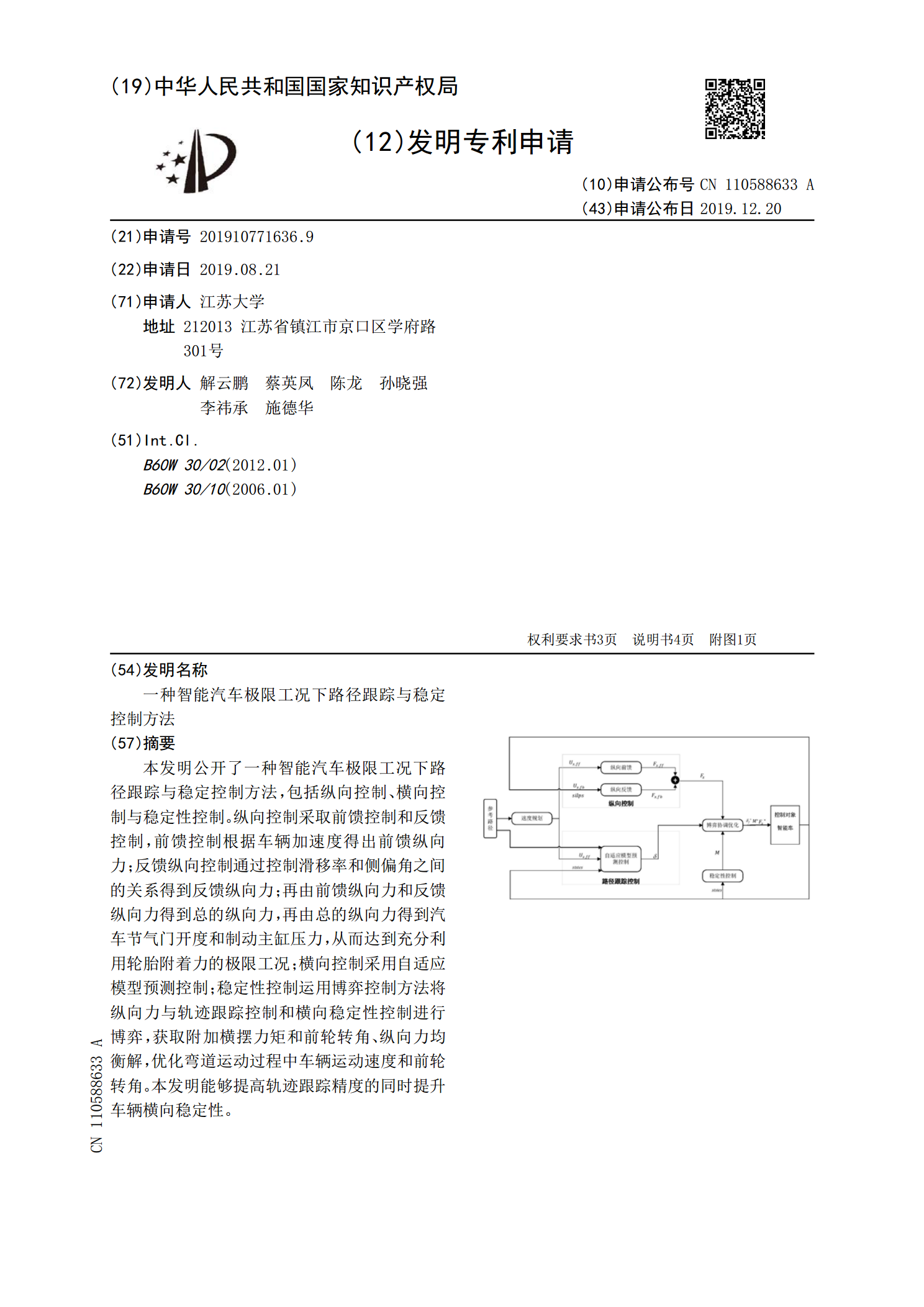
本发明公开了一种智能汽车极限工况下路径跟踪与稳定控制方法,包括纵向控制、横向控制与稳定性控制。纵向控制采取前馈控制和反馈控制,前馈控制根据车辆加速度得出前馈纵向力;反馈纵向控制通过控制滑移率和侧偏角之间的关系得到反馈纵向力;再由前馈纵向力和反馈纵向力得到总的纵向力,再由总的纵向力得到汽车节气门开度和制动主缸压力,从而达到充分利用轮胎附着力的极限工况;横向控制采用自适应模型预测控制;稳定性控制运用博弈控制方法将纵向力与轨迹跟踪控制和横向稳定性控制进行博弈,获取附加横摆力矩和前轮转角、纵向力均衡解,优化弯道运

基于Elman神经网络的车轮滑移率跟踪控制.docx
基于Elman神经网络的车轮滑移率跟踪控制基于Elman神经网络的车轮滑移率跟踪控制摘要:车辆的安全驾驶离不开对车轮滑移率的准确控制。本论文提出了基于Elman神经网络的车轮滑移率跟踪控制方法。首先介绍了车轮滑移率的定义和重要性,然后详细阐述了Elman神经网络的原理和结构。接下来,提出了基于Elman神经网络的车轮滑移率跟踪控制算法,并通过仿真实验验证了该方法的有效性和性能优势。最后,对未来的研究方向进行了展望。关键词:车轮滑移率、Elman神经网络、跟踪控制、仿真实验、未来研究Ⅰ.介绍车辆的安全驾驶离
一种基于汽车理想滑移率的车轮防滑控制方法.pdf
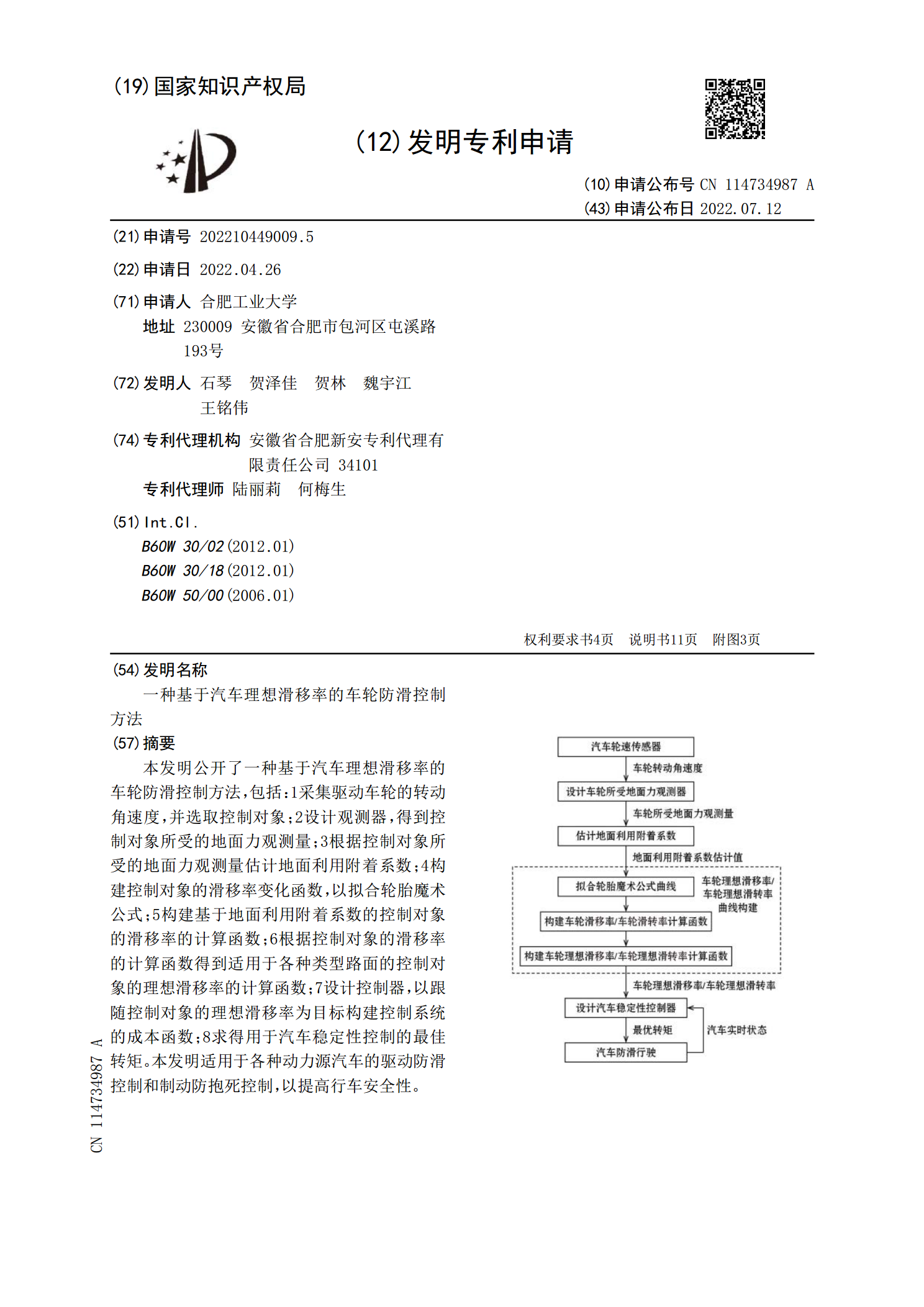
本发明公开了一种基于汽车理想滑移率的车轮防滑控制方法,包括:1采集驱动车轮的转动角速度,并选取控制对象;2设计观测器,得到控制对象所受的地面力观测量;3根据控制对象所受的地面力观测量估计地面利用附着系数;4构建控制对象的滑移率变化函数,以拟合轮胎魔术公式;5构建基于地面利用附着系数的控制对象的滑移率的计算函数;6根据控制对象的滑移率的计算函数得到适用于各种类型路面的控制对象的理想滑移率的计算函数;7设计控制器,以跟随控制对象的理想滑移率为目标构建控制系统的成本函数;8求得用于汽车稳定性控制的最佳转矩。本发