
一种用于自治水下机器人的高精度浮力调节装置.pdf

听云****君哇

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于自治水下机器人的高精度浮力调节装置.pdf
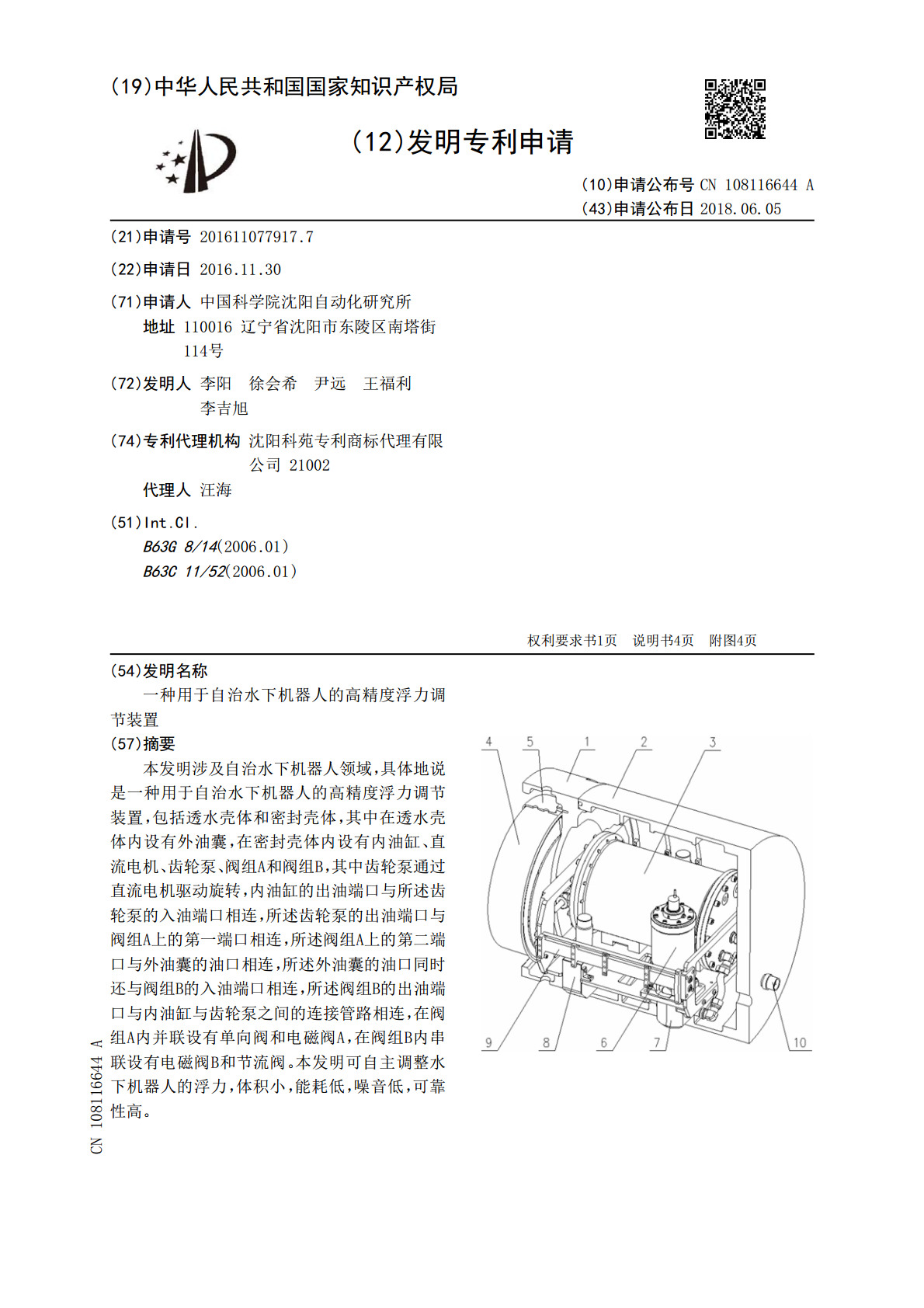
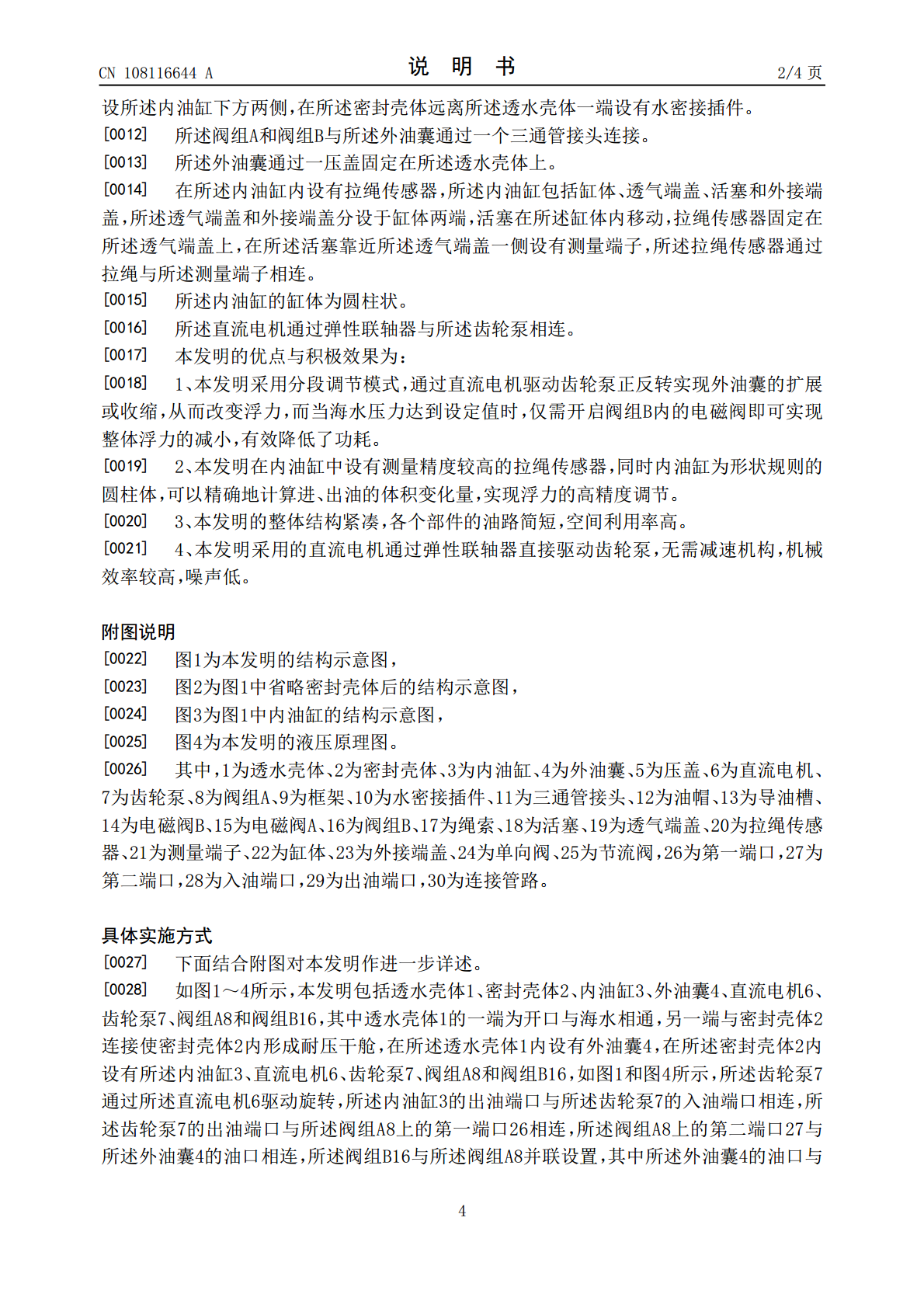
本发明涉及自治水下机器人领域,具体地说是一种用于自治水下机器人的高精度浮力调节装置,包括透水壳体和密封壳体,其中在透水壳体内设有外油囊,在密封壳体内设有内油缸、直流电机、齿轮泵、阀组A和阀组B,其中齿轮泵通过直流电机驱动旋转,内油缸的出油端口与所述齿轮泵的入油端口相连,所述齿轮泵的出油端口与阀组A上的第一端口相连,所述阀组A上的第二端口与外油囊的油口相连,所述外油囊的油口同时还与阀组B的入油端口相连,所述阀组B的出油端口与内油缸与齿轮泵之间的连接管路相连,在阀组A内并联设有单向阀和电磁阀A,在阀组B内串联

一种水下机器人浮力调节装置.pdf
本发明涉及水下机器人的配套设备,具体地说是一种水下机器人浮力调节装置,包括载体外壳、端盖、内皮囊、外皮囊、直流电机、齿轮泵及阀组,载体外壳的两端分别连接有端盖、共同形成密封舱,内皮囊、直流电机、齿轮泵及阀组分别安装在密封舱内;齿轮泵通过直流电机驱动工作,齿轮泵的出油口串联单向阀、过滤器后接至阀组,齿轮泵的吸油口通过管路与阀组直联;内、外皮囊的油口分别通过管路与阀组连接;外皮囊的体积通过齿轮泵向内注油而增大、浮力增加,外皮囊的液压油通过水压或齿轮泵吸油流向内皮囊,外皮囊体积缩小、浮力减小。本发明简单可靠,功
一种用于水下滑翔机的混合驱动浮力调节装置.pdf
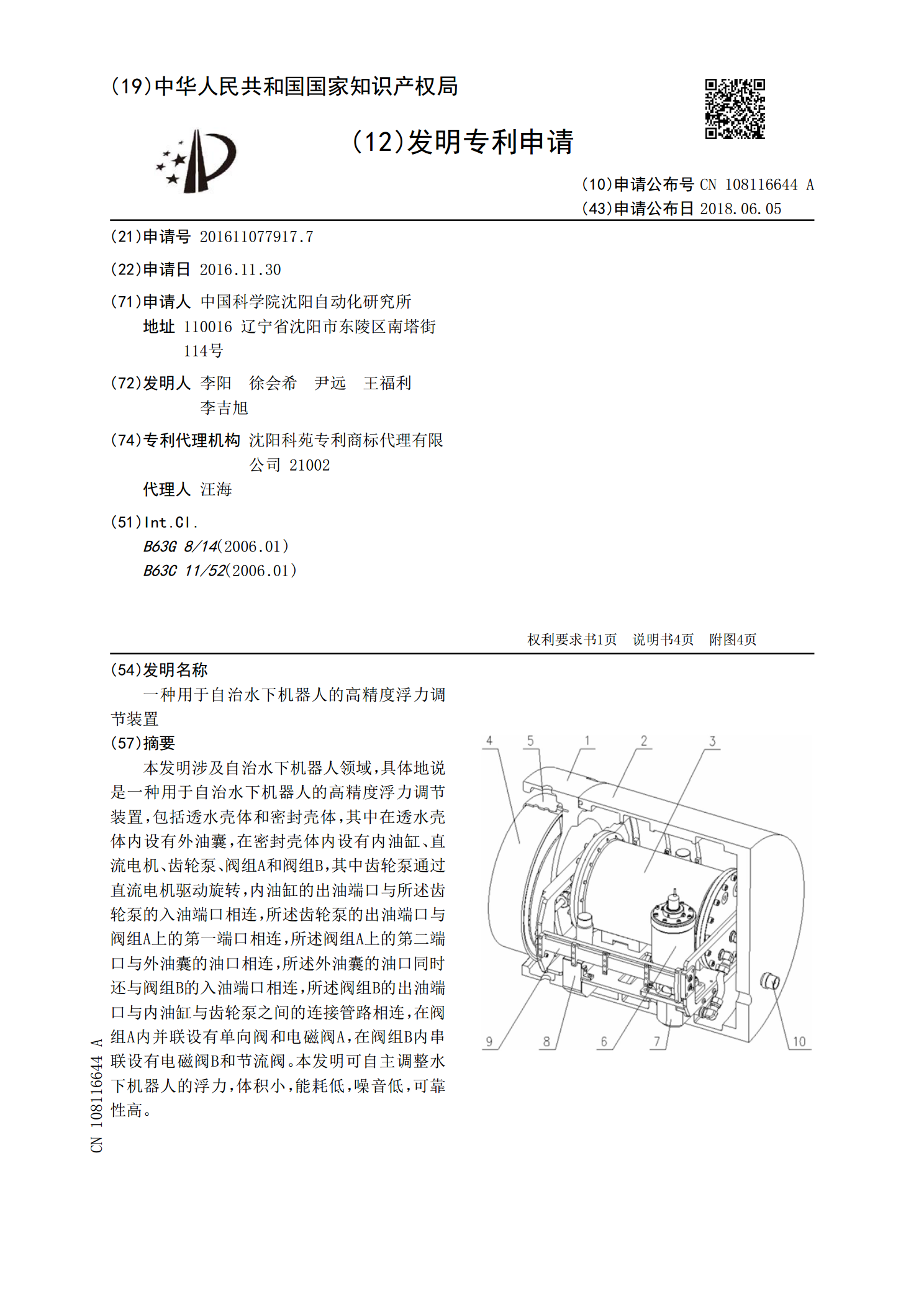
本发明提出一种用于水下滑翔机的混合驱动浮力调节装置,包括换热器和浮力调节舱;换热器耐压外壳中充满温敏相变材,换热器软中充满传输液体并与软管塞头密封相连,换热器耐压壳体两端分别用平板封头及椭圆封头连接,此外使用O型圈进行密封。换热器与浮力调节舱之间采用管路连接。浮力调节舱包括蓄能器,内皮囊,双向齿轮泵,外皮囊,控制电路板和管路。透水式外皮囊与换热器悬挂于滑翔机机体外部承受海水压力,浮力调节舱放置于滑翔机主壳体内。浮力调节舱内部管路与舱外换热器和外皮囊配合,实现改变浮力大小。本发明同时利用工作海域深度的温差能

一种水下机器人用便于调节重力与浮力的装置.pdf
本发明公开了一种水下机器人用便于调节重力与浮力的装置,包括第一平衡板和第二平衡板,所述第一平衡板的左侧固定有基板,且基板的左侧设置有铰链,所述第二平衡板的右侧固定有尾板,且第一平衡板与第二平衡板之间安装有连接中枢。该水下机器人用便于调节重力与浮力的装置通过架杆和连接螺栓将重力调节板每三个拼接成一组,在第一平衡板与第二平衡板中各自形成两个重力调节板块,利用连杆对各个重力调节板的支撑作用,以及通过连接栓对各个连杆在第一平衡板与第二平衡板上的配合关系,使由重力调节板组成的重力调节板块自身承载面积能够得到调节变化

一种水下机器人用双向排油式浮力调节装置.pdf
本发明涉及水下机器人浮力调节设备,具体地说是一种水下机器人用双向排油式浮力调节装置,包括内皮囊、直流电机、电磁阀、单向阀、双向齿轮泵、艉部端盖及外皮囊,所述艉部端盖与水下机器人筒体密封连接,外皮囊安装在艉部端盖的外侧;内皮囊、直流电机、电磁阀、单向阀及双向齿轮泵分别安装在水下机器人筒体内,内皮囊通过管路与由直流电机驱动的双向齿轮泵相连接;电磁阀及单向阀通过管路并联连接于双向齿轮泵与外皮囊之间。本发明由直流电机驱动一个双向齿轮泵,通过双向齿轮泵的正、反转实现排油或回油,进而调节水下机器人的浮力,结构简单,安