
基于深度学习的海事雷达图像处理方法.pdf

宜然****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度学习的海事雷达图像处理方法.pdf
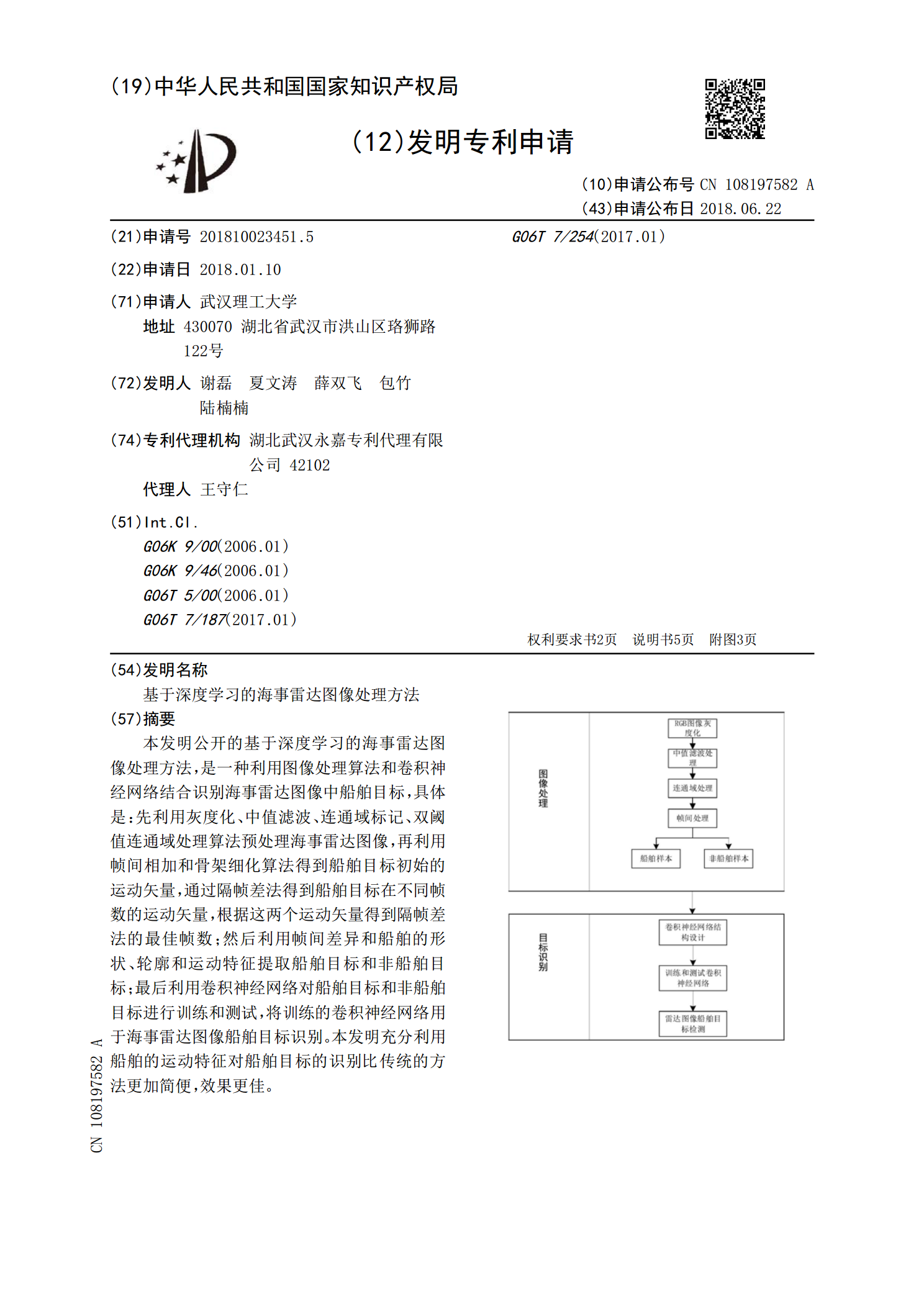
本发明公开的基于深度学习的海事雷达图像处理方法,是一种利用图像处理算法和卷积神经网络结合识别海事雷达图像中船舶目标,具体是:先利用灰度化、中值滤波、连通域标记、双阈值连通域处理算法预处理海事雷达图像,再利用帧间相加和骨架细化算法得到船舶目标初始的运动矢量,通过隔帧差法得到船舶目标在不同帧数的运动矢量,根据这两个运动矢量得到隔帧差法的最佳帧数;然后利用帧间差异和船舶的形状、轮廓和运动特征提取船舶目标和非船舶目标;最后利用卷积神经网络对船舶目标和非船舶目标进行训练和测试,将训练的卷积神经网络用于海事雷达图像船

基于深度学习的PET图像处理方法.pdf
本发明提供了一种基于深度学习的PET图像处理方法,涉及医学图像处理和评估技术领域,其采用多输入深度学习的PET图像融合算法,该方法融合了非滤波和滤波后的多幅PET图像信息。通过用低剂量IEC模体和低剂量身体病人数据对算法进行了评估,并与传统非滤波和滤波后的图像进行了比较。通过本发明深度学习图像融合算法处理的PET图像降低了更多噪声的同时提高了图像的对比度,并且保留了图像的细节信息,表明了该算法在临床低剂量PET成像中潜在的临床应用价值。

基于深度学习的低信噪比下雷达RD图像目标检测方法.pdf
本发明公开了一种基于深度学习的低信噪比下雷达RD图像目标检测方法,该方法为:获取雷达回波数据,生成雷达RD图像;对雷达RD图像进行预处理并进行标签,得到数据集;对数据集进行分类,得到训练集、验证集与测试集;构建针对低信噪比下目标检测的深度学习神经网络;采用训练集对构建的神经网络进行训练,并输出损失值和训练后的检测神经网络;利用训练好的检测神经网络对测试集进行目标检测;获得测试集目标检测准确率结果。本发明基于大量的雷达RD图像数据,通过深度学习神经网络训练得到最优的雷达目标检测网络,该方法下得到的目标检测网

基于深度学习的图像处理技术.docx
基于深度学习的图像处理技术基于深度学习的图像处理技术摘要:随着深度学习算法的发展,图像处理技术得到了显著的改进。通过深度学习网络,人们可以实现自动化的图像处理,例如图像分类、目标检测和图像生成等。本论文将介绍基于深度学习的图像处理技术的发展趋势、应用案例和未来前景。1.简介图像处理技术是计算机视觉领域的重要研究方向之一。传统的图像处理方法依赖于手工设计的特征提取和分类器,对于复杂的图像任务,效果有限。然而,随着深度学习技术的引入,图像处理的效果得到了极大的提升。2.深度学习在图像分类中的应用图像分类是一项
基于自动化深度学习的雷达或声呐图像目标检测与分类方法.pdf
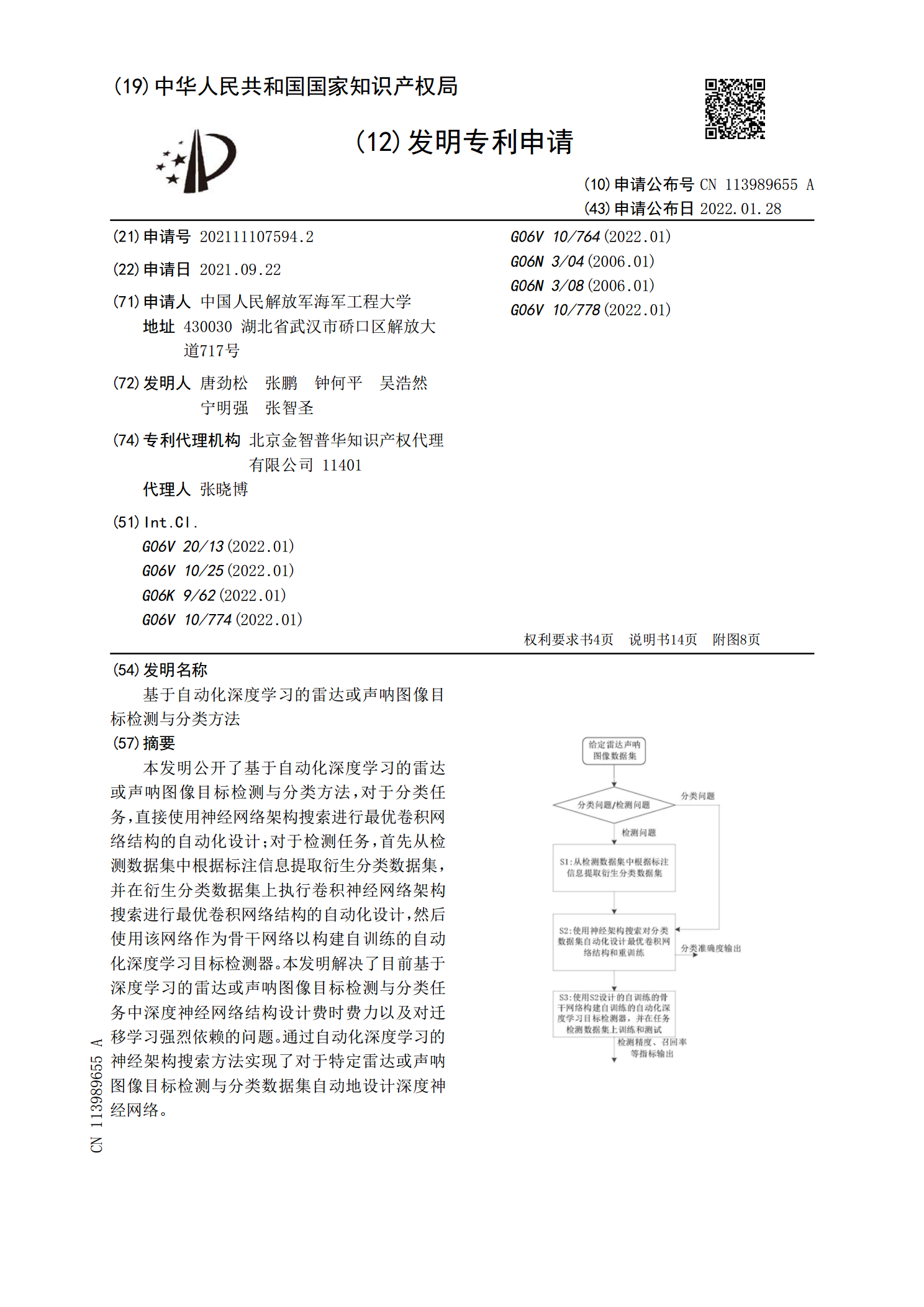
本发明公开了基于自动化深度学习的雷达或声呐图像目标检测与分类方法,对于分类任务,直接使用神经网络架构搜索进行最优卷积网络结构的自动化设计;对于检测任务,首先从检测数据集中根据标注信息提取衍生分类数据集,并在衍生分类数据集上执行卷积神经网络架构搜索进行最优卷积网络结构的自动化设计,然后使用该网络作为骨干网络以构建自训练的自动化深度学习目标检测器。本发明解决了目前基于深度学习的雷达或声呐图像目标检测与分类任务中深度神经网络结构设计费时费力以及对迁移学习强烈依赖的问题。通过自动化深度学习的神经架构搜索方法实现了