
一种机器人头部旋转装置.pdf

曦晨****22

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人头部旋转装置.pdf
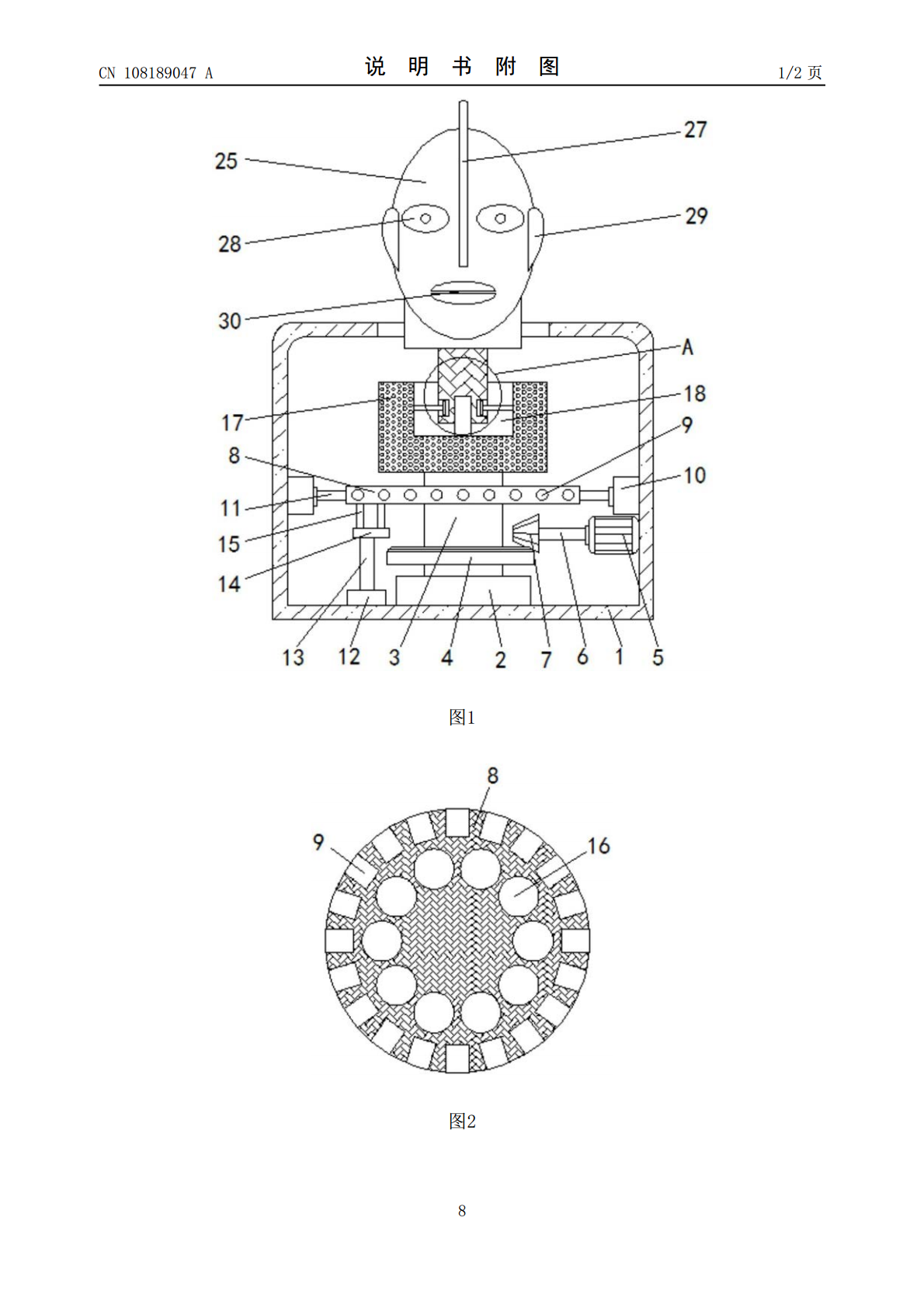
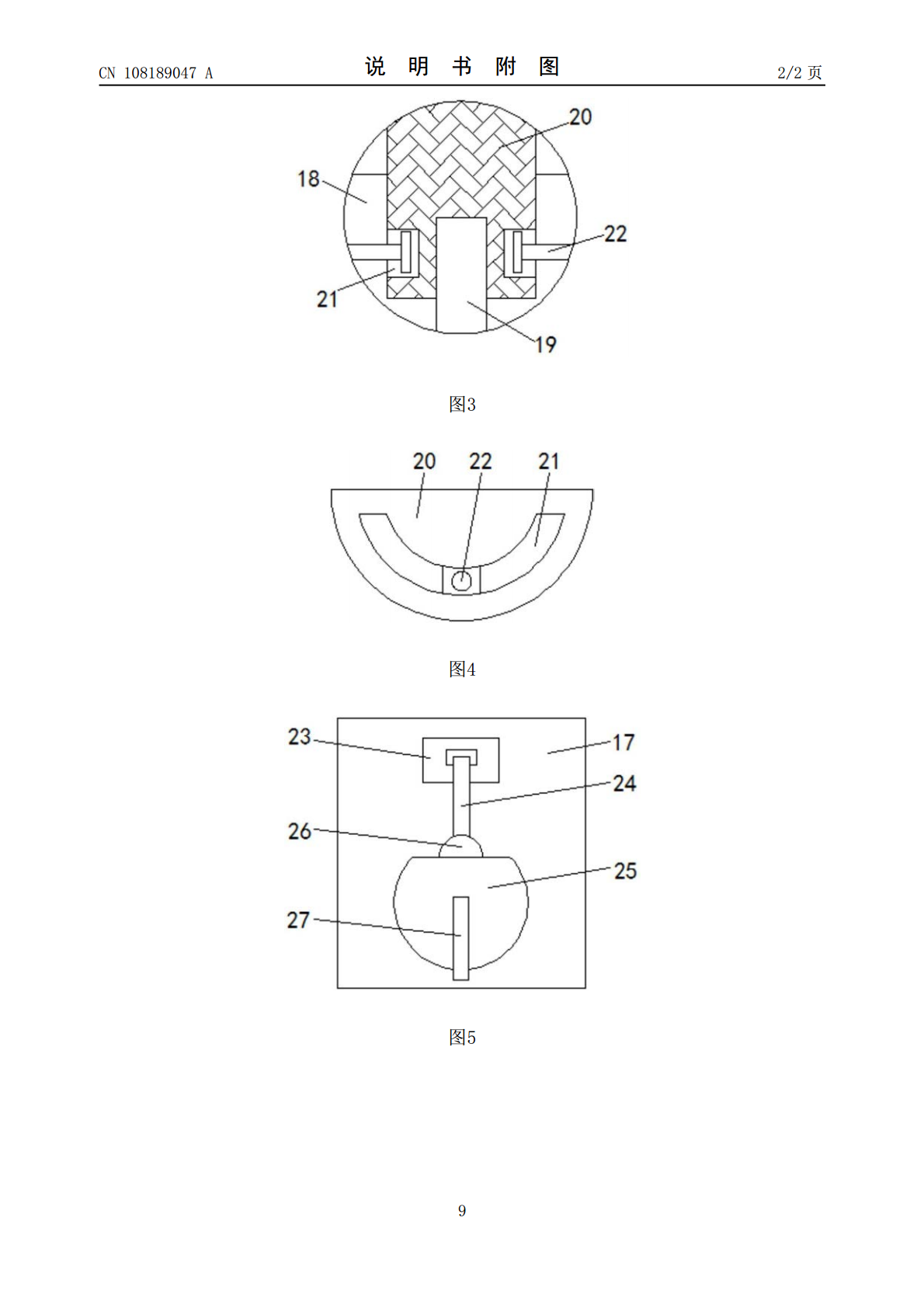
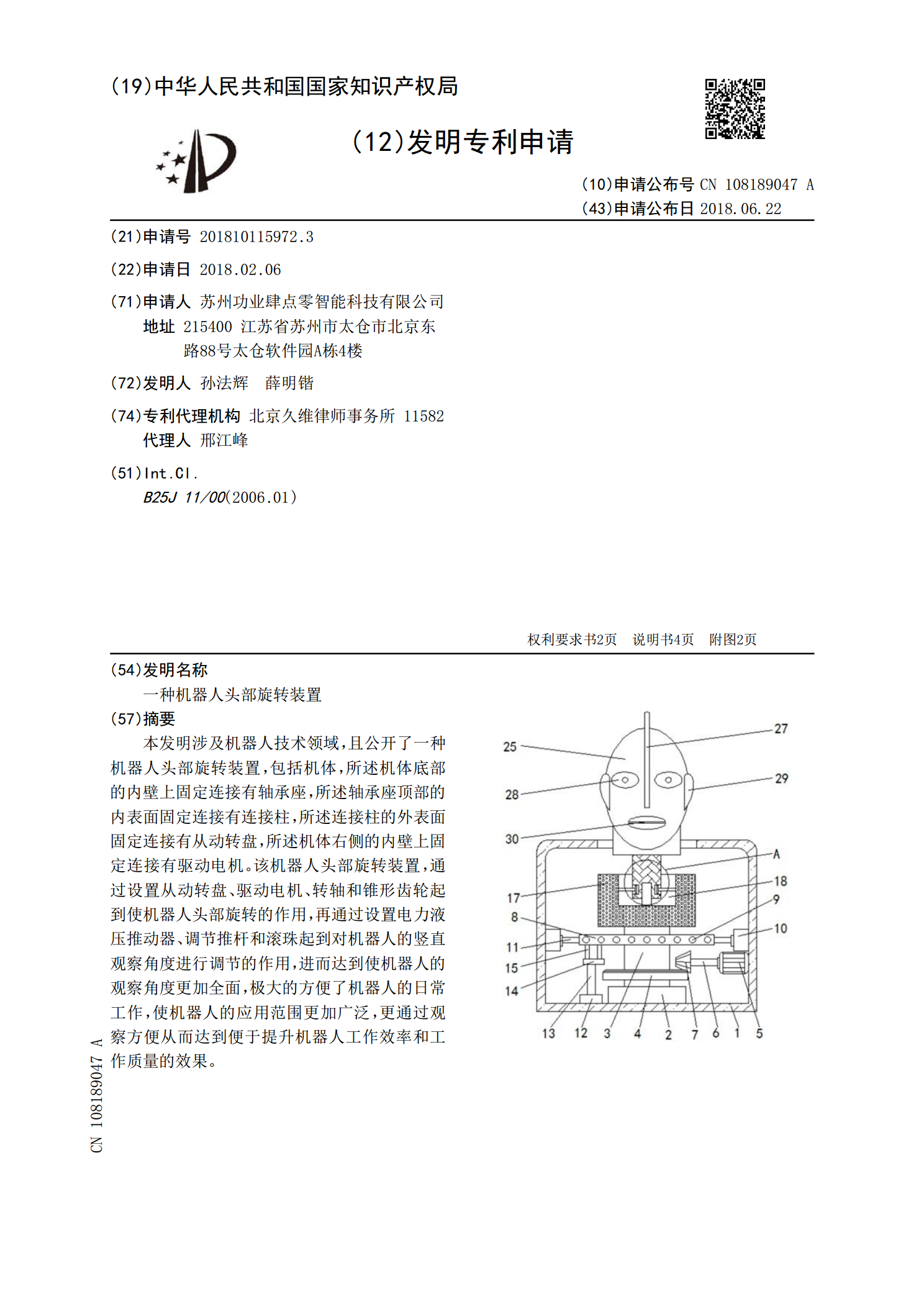
本发明涉及机器人技术领域,且公开了一种机器人头部旋转装置,包括机体,所述机体底部的内壁上固定连接有轴承座,所述轴承座顶部的内表面固定连接有连接柱,所述连接柱的外表面固定连接有从动转盘,所述机体右侧的内壁上固定连接有驱动电机。该机器人头部旋转装置,通过设置从动转盘、驱动电机、转轴和锥形齿轮起到使机器人头部旋转的作用,再通过设置电力液压推动器、调节推杆和滚珠起到对机器人的竖直观察角度进行调节的作用,进而达到使机器人的观察角度更加全面,极大的方便了机器人的日常工作,使机器人的应用范围更加广泛,更通过观察方便从而

一种娱乐机器人用头部装置.pdf
本发明公开了一种娱乐机器人用头部装置,包括头部模拟块,所述头部模拟块的下端固定有活动下颌,活动下颌的后端固定有液压缸,活动下颌内安装有充气模拟舌,活动下颌的后端安装有气管,头部模拟块的左、右两部均设有凹槽,凹槽内设有滑动块,滑动块的前端安装有一号模拟灯,头部模拟块内安装有气缸,凹槽内均设有通孔,头部模拟块内安装有导引管,凹槽的前部均设有二号模拟灯,头部模拟块的外壁上安装有眼罩。本发明具有结构设计合理、使用方便等优点,模拟了头部的运动,具有很高的表演效果,同时利用引导管内的水流与二号模拟灯的配合,对人的眼泪

双面机器人头部装置.pdf
发明涉及一种双面机器人头部装置,包括:眼部支撑架,嘴部安装架,四眼球水平转动部件,四眼睑部件,双嘴部件,微型电机一,微型电机二,微型电机三,同步带传动组件一,同步带传动组件二;眼部支撑架下面固定连接所述嘴部安装架,微型电机一和微型电机二固定安装在眼部支撑架上,在眼部支撑架上安装四眼球水平转动部件,微型电机一通过同步带传动组件二传动来驱动四眼球水平转动部件;四眼睑部件安装在四眼球水平转动部件上,微型电机二通过同步带传动组件一传动来驱动四眼睑部件;在嘴部安装架上安装双嘴部件,微型电机三固定安装在嘴部安装架上,
一种旋转式口腔检测头部支撑装置.pdf
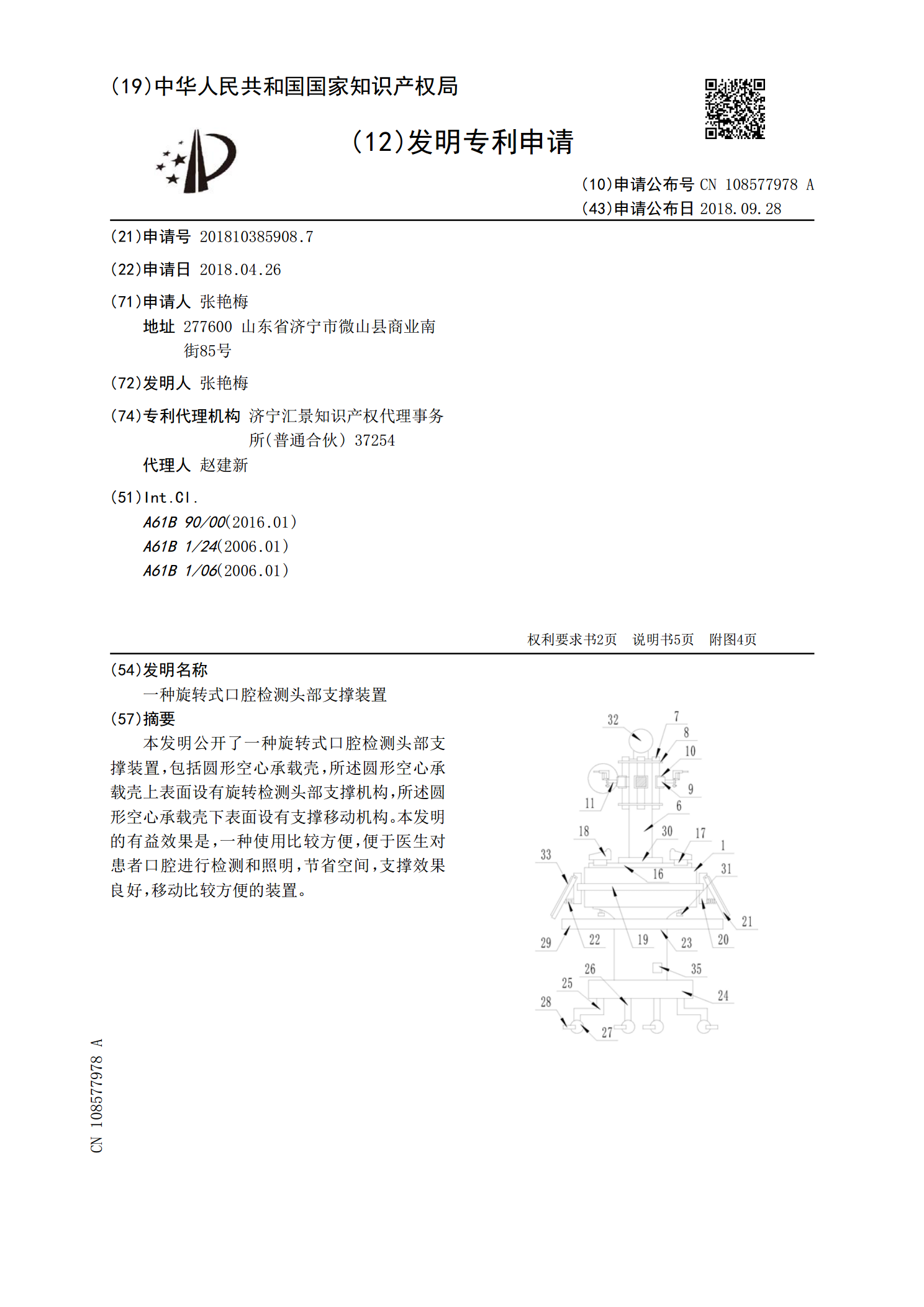
本发明公开了一种旋转式口腔检测头部支撑装置,包括圆形空心承载壳,所述圆形空心承载壳上表面设有旋转检测头部支撑机构,所述圆形空心承载壳下表面设有支撑移动机构。本发明的有益效果是,一种使用比较方便,便于医生对患者口腔进行检测和照明,节省空间,支撑效果良好,移动比较方便的装置。
一种机器人头部装置及机器结构.pdf
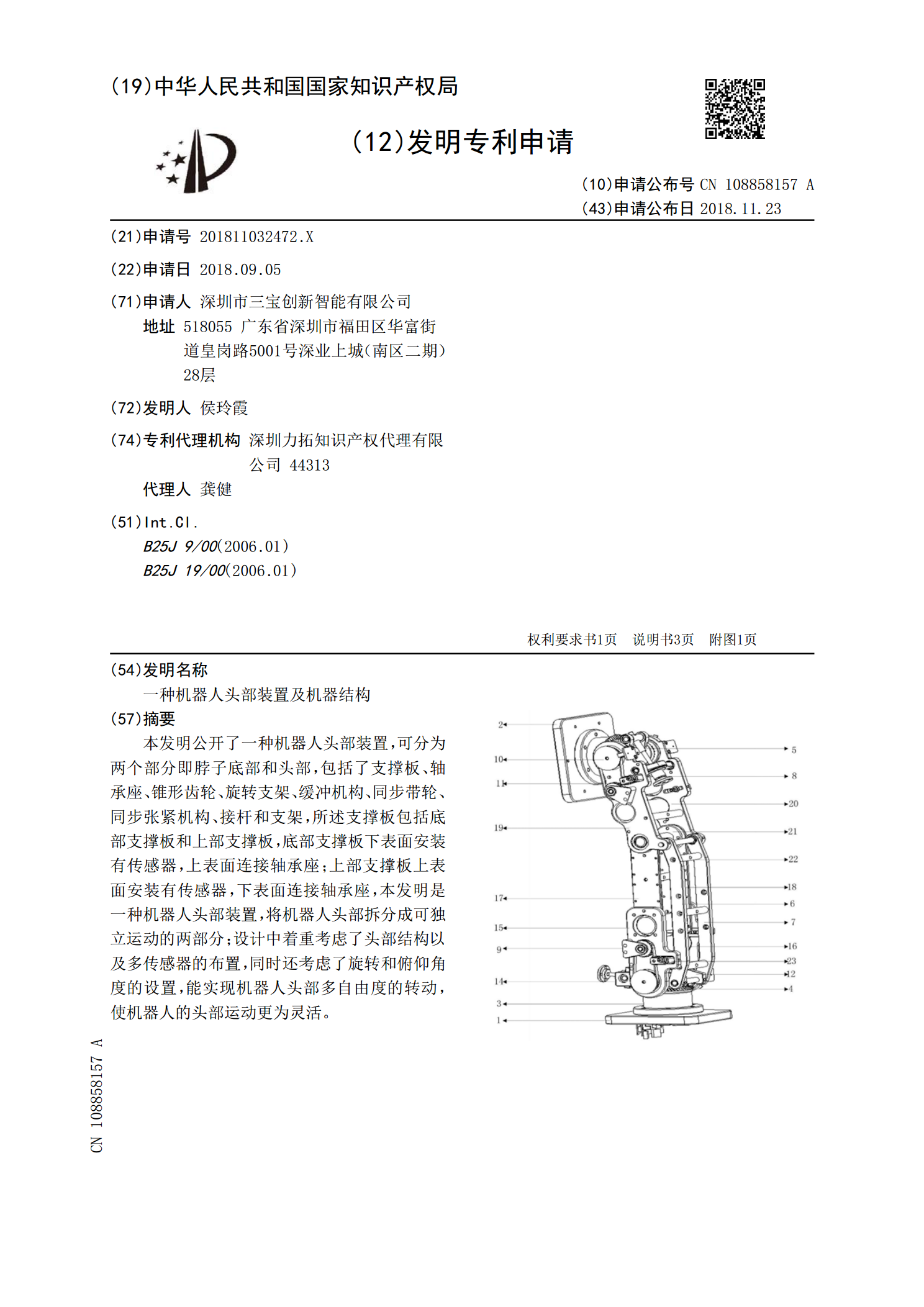
本发明公开了一种机器人头部装置,可分为两个部分即脖子底部和头部,包括了支撑板、轴承座、锥形齿轮、旋转支架、缓冲机构、同步带轮、同步张紧机构、接杆和支架,所述支撑板包括底部支撑板和上部支撑板,底部支撑板下表面安装有传感器,上表面连接轴承座;上部支撑板上表面安装有传感器,下表面连接轴承座,本发明是一种机器人头部装置,将机器人头部拆分成可独立运动的两部分;设计中着重考虑了头部结构以及多传感器的布置,同时还考虑了旋转和俯仰角度的设置,能实现机器人头部多自由度的转动,使机器人的头部运动更为灵活。