
风力发电机组及其盘车系统、盘车控制方法与装置.pdf

一只****签网


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

风力发电机组及其盘车系统、盘车控制方法与装置.pdf
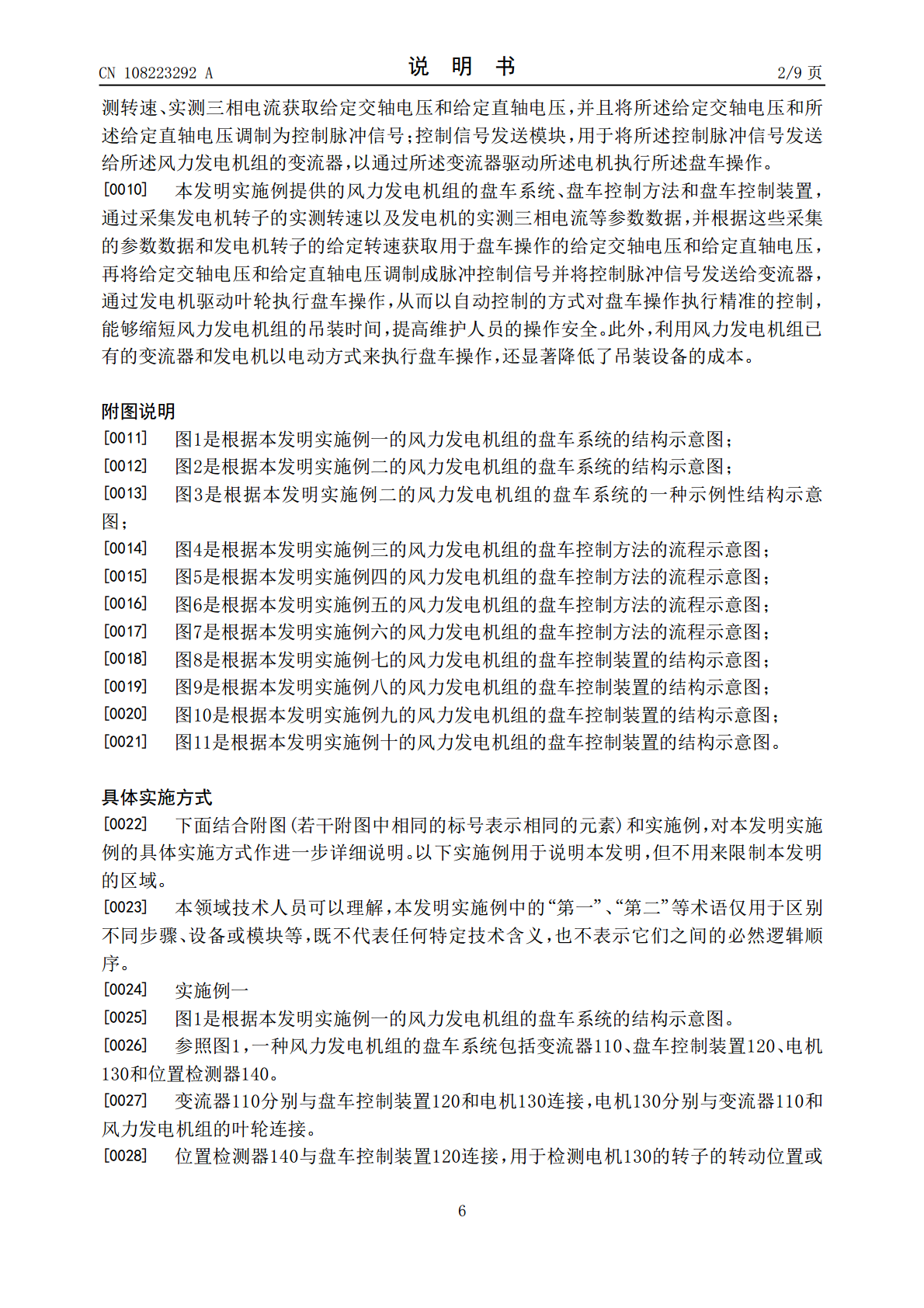
本发明实施例提供了一种风力发电机组及其盘车系统、盘车控制方法与装置。盘车系统包括变流器、盘车控制装置、电机和位置检测器。其中,变流器分别与盘车控制装置和电机连接,电机分别与变流器和风力发电机组的叶轮连接;位置检测器与盘车控制装置连接,用于检测电机的转子的转动位置或叶轮的转动位置;盘车控制装置用于根据所述位置检测器检测到的转子或叶轮的转动位置,生成用于控制所述电机进行盘车操作的控制信号,并且将控制信号发送给所述变流器,以通过所述变流器驱动电机执行所述盘车操作。以自动控制的方式对盘车操作执行精准的控制,能够缩

风力发电机组叶轮盘车装置及盘车方法.pdf
本发明提供一种风力发电机组叶轮盘车装置及盘车方法,风力发电机组包括发电机、塔筒、设置在塔筒上并能够绕塔筒的轴线方向转动的机舱、连接在机舱和塔筒之间的偏航机构、连接在机舱上且可绕发电机轴向方向转动的转子,风力发电机组叶轮盘车装置包括拉拽件,拉拽件的第一端连接在固定平台上,拉拽件的第二端可拆卸地与转子连接,机舱在偏航机构的带动下转动时,拉拽件使转子转动。该风力发电机组叶轮盘车装置无需设置额外的动力源,结构简单,提高了盘车效率,降低了盘车的成本。

盘车装置及风力发电机组.pdf
本发明提供一种盘车装置及风力发电机组,涉及盘车装置技术领域,盘车装置包括盘车主体和减速器,所述盘车主体与所述减速器可拆卸地连接,且所述减速器用于与风力发电机组的刹车盘啮合。由于盘车主体与减速器之间为可拆卸地连接,能够减小单件零件的尺寸和重量,在安装盘车装置时,可以将体积相对较小的盘车主体和减速器先运送至机舱内,再在机舱内组装盘车主体和减速器,在拆卸盘车装置时,可以先在机舱内将盘车主体和减速器分离,再将盘车主体和减速器分别运送出机舱,能够降低机舱空间对盘车装置的安装位置的限制程度,便于盘车装置在机舱内安装、
风力发电机组盘车装置.pdf
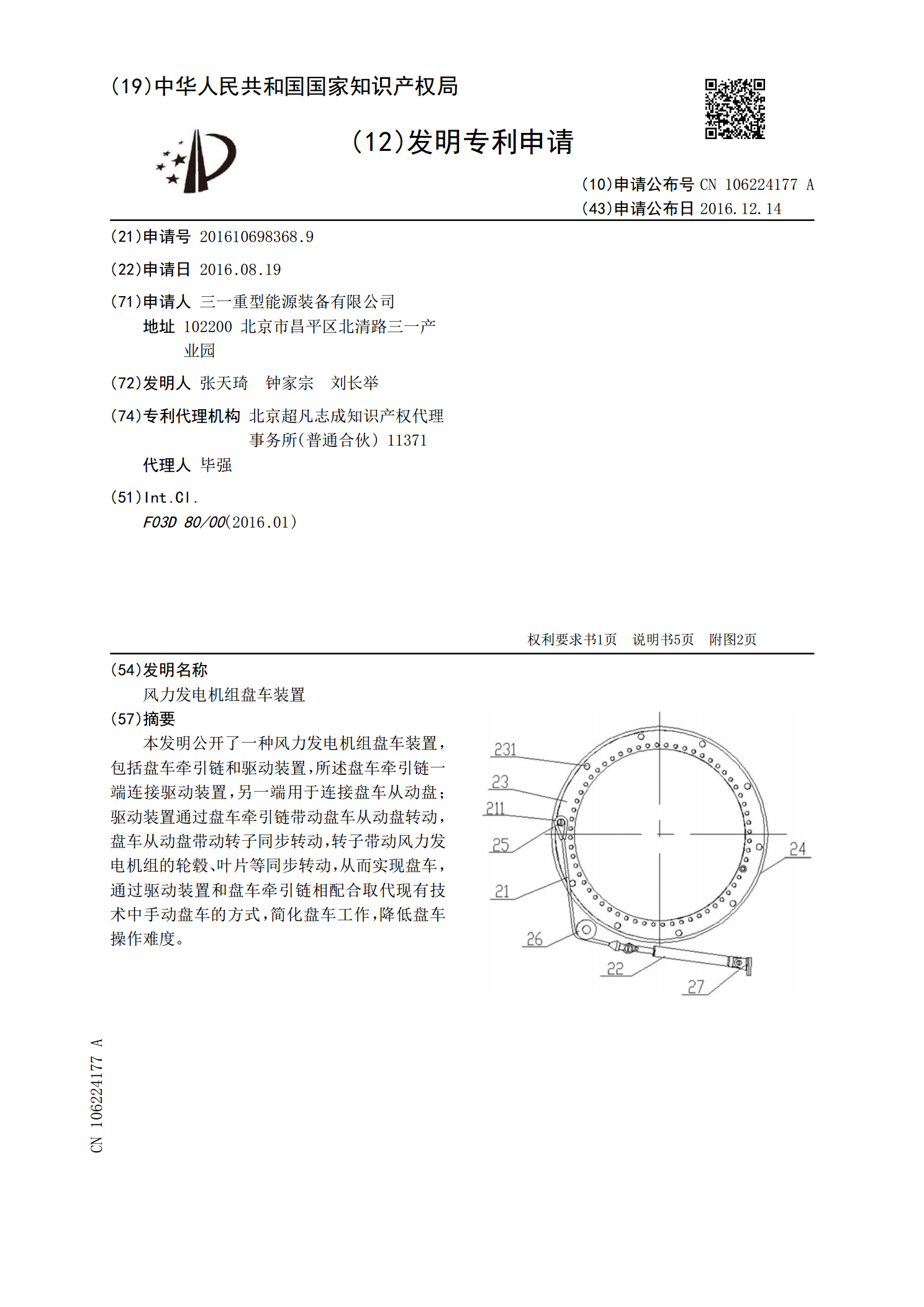
本发明公开了一种风力发电机组盘车装置,包括盘车牵引链和驱动装置,所述盘车牵引链一端连接驱动装置,另一端用于连接盘车从动盘;驱动装置通过盘车牵引链带动盘车从动盘转动,盘车从动盘带动转子同步转动,转子带动风力发电机组的轮毂、叶片等同步转动,从而实现盘车,通过驱动装置和盘车牵引链相配合取代现有技术中手动盘车的方式,简化盘车工作,降低盘车操作难度。
电动盘车装置及其控制方法.pdf
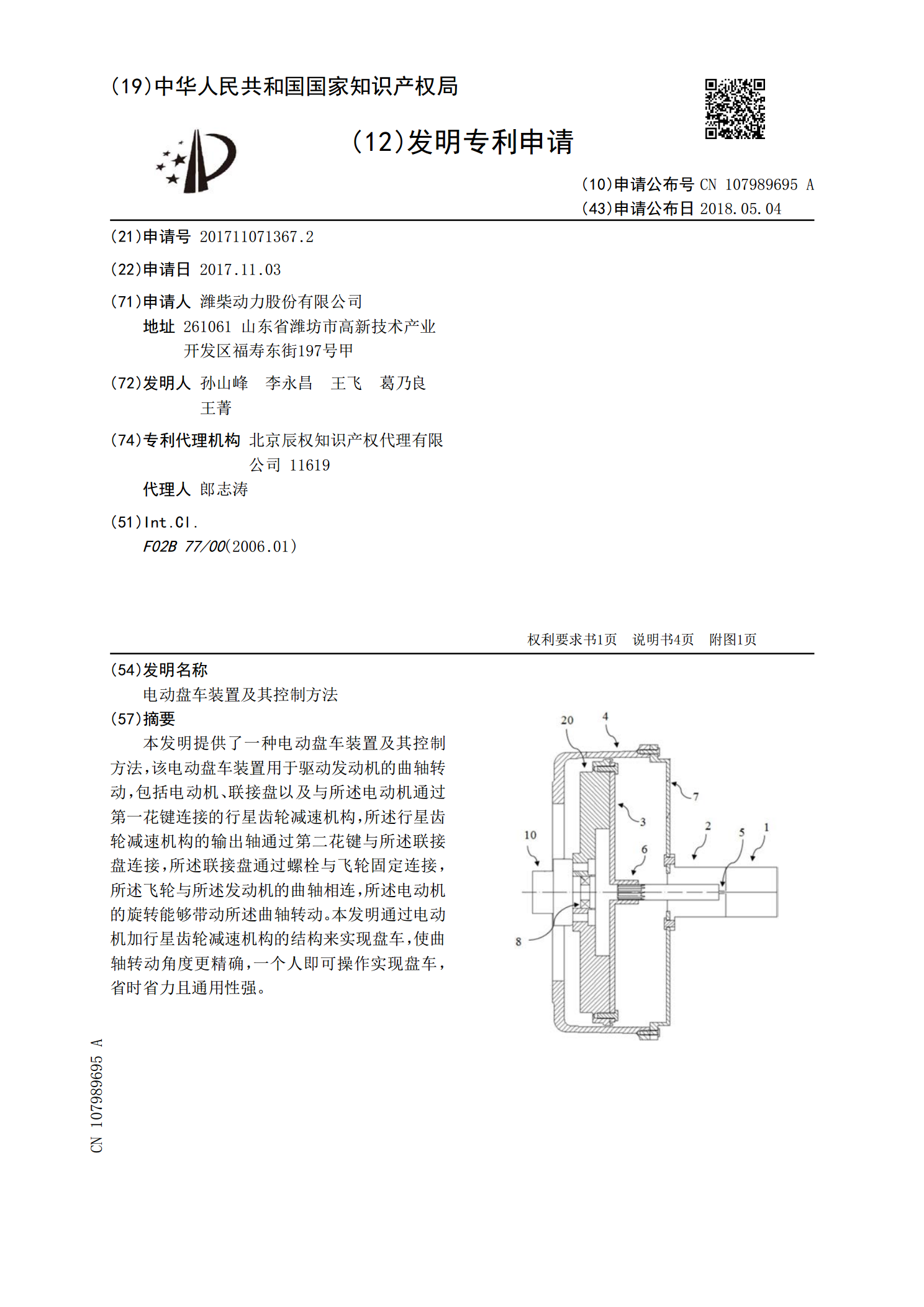
本发明提供了一种电动盘车装置及其控制方法,该电动盘车装置用于驱动发动机的曲轴转动,包括电动机、联接盘以及与所述电动机通过第一花键连接的行星齿轮减速机构,所述行星齿轮减速机构的输出轴通过第二花键与所述联接盘连接,所述联接盘通过螺栓与飞轮固定连接,所述飞轮与所述发动机的曲轴相连,所述电动机的旋转能够带动所述曲轴转动。本发明通过电动机加行星齿轮减速机构的结构来实现盘车,使曲轴转动角度更精确,一个人即可操作实现盘车,省时省力且通用性强。