
基于水平集的在线目标轮廓跟踪方法.pdf

努力****振宇

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于水平集的在线目标轮廓跟踪方法.pdf
本发明公开了一种基于水平集的在线目标轮廓跟踪方法,先在第一帧目标图像中手动标定初始轮廓,设置水平集轮廓跟踪标志,根据初始目标轮廓来初始化判别式分类器、水平集函数和目标检测器;根据水平集轮廓跟踪标志是否有效来决定是否进行基于判别式表观模型的水平集轮廓跟踪;采用目标检测器进行目标检测;根据轮廓结果和目标结果判断得到目标轮廓跟踪结果,更新初始目标轮廓;然后根据目标轮廓跟踪结果对判别式分类器、水平集函数和目标检测器进行更新,再对下一帧图像进行目标轮廓跟踪。本发明采用基于判别式表观模型的水平集轮廓跟踪和目标检测联合

基于变分水平集的目标轮廓分割方法.docx
基于变分水平集的目标轮廓分割方法基于变分水平集的目标轮廓分割方法摘要:目标轮廓分割是图像处理和计算机视觉领域中的关键任务之一。传统的分割方法受限于对图像中目标特征的先验知识,常常面临着不准确、不稳定以及依赖参数选择等问题。为了解决这些问题,近年来提出了基于变分水平集的目标轮廓分割方法。本文将重点介绍基于变分水平集的目标轮廓分割方法的原理和算法,并通过实验验证其在目标轮廓分割中的有效性和优越性。一、引言目标轮廓分割是图像处理和计算机视觉中的重要问题,它在目标识别、图像分析以及图像检索等领域具有广泛的应用。传

基于统计势能的水平集特定目标轮廓提取方法.docx
基于统计势能的水平集特定目标轮廓提取方法基于统计势能的水平集特定目标轮廓提取方法概述:在图像处理中,轮廓提取一直是一个关键的任务。而随着深度学习技术的发展,许多新型的轮廓提取方法涌现出来。在这些方法中,水平集方法是应用最广泛的一种方法。水平集方法通过演化的方式来提取轮廓,它能够适应复杂的轮廓形状,并且不需要预先设置参数。但是,传统的水平集方法不能很好地处理多目标轮廓提取的问题。针对这个问题,本文提出了一种基于统计势能的水平集特定目标轮廓提取方法,该方法能够同时提取多个特定目标对象的轮廓。方法:我们的方法主
一种基于超像素光流场的水平集轮廓跟踪方法.pdf
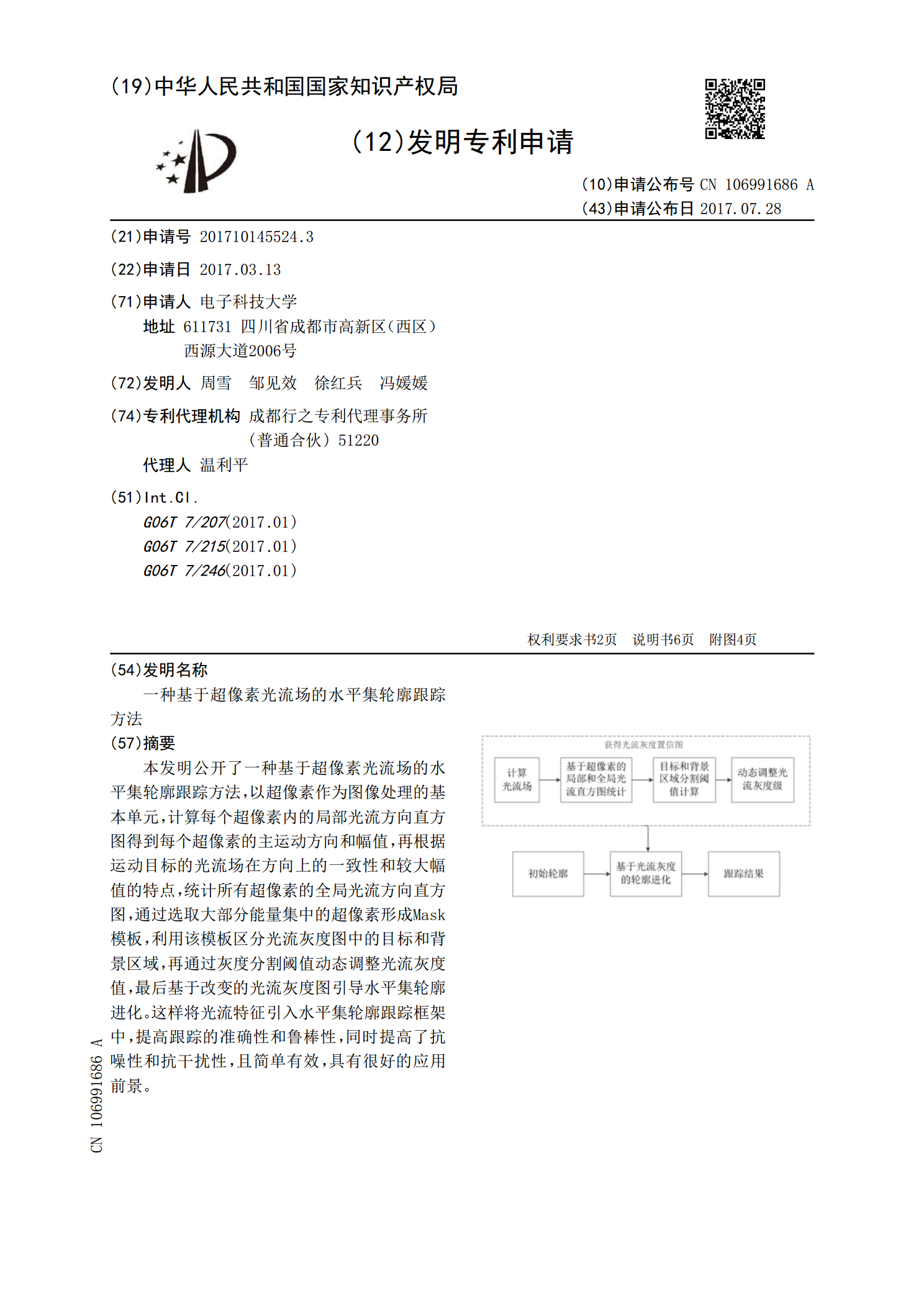
本发明公开了一种基于超像素光流场的水平集轮廓跟踪方法,以超像素作为图像处理的基本单元,计算每个超像素内的局部光流方向直方图得到每个超像素的主运动方向和幅值,再根据运动目标的光流场在方向上的一致性和较大幅值的特点,统计所有超像素的全局光流方向直方图,通过选取大部分能量集中的超像素形成Mask模板,利用该模板区分光流灰度图中的目标和背景区域,再通过灰度分割阈值动态调整光流灰度值,最后基于改变的光流灰度图引导水平集轮廓进化。这样将光流特征引入水平集轮廓跟踪框架中,提高跟踪的准确性和鲁棒性,同时提高了抗噪性和抗干

基于水平集方法的动态目标跟踪路径最优仿真.docx
基于水平集方法的动态目标跟踪路径最优仿真随着自动驾驶技术的不断发展,动态目标跟踪技术也成为自动驾驶领域的重要研究方向之一。其中,基于水平集方法的动态目标跟踪路径最优算法受到了广泛关注。水平集方法是一种数学计算方法,能够表现物体的边界形态。在动态目标跟踪方面,水平集方法可以将车辆与目标物体的边界形态转化为数学模型,从而实现路径规划和轨迹跟踪。相比传统的动态目标跟踪方法,基于水平集方法的路径规划算法能够更加准确地捕捉目标物体的轮廓和移动轨迹,实现更加精准的跟踪路径。本文将从以下几个方面进行阐述:水平集方法的原