
全自动调平控制系统设计及调平策略研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全自动调平控制系统设计及调平策略研究的任务书.docx
全自动调平控制系统设计及调平策略研究的任务书任务书一、背景全自动调平控制系统是工业自动化领域的重要应用之一,其主要功能是控制机器人或其他设备在不稳定环境中实现准确的位置调整,以达到最佳工作效果。在传统的调平控制系统中,需要人工参与,通过手动操作调整仪器来实现精确的平衡位置。然而,这种方式存在一定的缺点,比如工作效率低、调整精度不高、人工操作困难等。为此,开发全自动调平控制系统是一个迫切需求。在过去的几十年里,许多专家和学者已经开展了相关研究,并提出了一系列关于自动调平策略的理论和方法。然而,这些方法在实际

全自动调平控制系统设计及调平策略研究的中期报告.docx
全自动调平控制系统设计及调平策略研究的中期报告中期报告一、研究背景全自动调平控制系统是一种重要的控制系统,广泛应用于机器人、自动驾驶车、智能家居等领域。随着工业自动化的发展和人们对生活品质的要求不断提高,全自动调平控制系统的研究与应用变得越来越重要。二、研究目的本研究旨在设计一种全自动调平控制系统,通过研究调平策略,提高系统的控制效果和鲁棒性,为实际应用提供参考和指导。三、研究内容1、全自动调平控制系统的设计2、调平策略的研究3、系统的控制效果分析四、研究进展1、控制系统设计根据全自动调平控制系统的特点,

全自动调平试验系统研究的任务书.docx
全自动调平试验系统研究的任务书任务书一、研究背景和目的由于地震和建筑的不规则性越来越明显,建筑物的基础平整度越来越重要。基础不平或不规则会导致结构和设备的静态和动态负荷不均匀,从而影响结构和设备的安全和稳定性。因此,建筑物的基础平整度测试和评估变得越来越重要。针对这一问题,我们的项目旨在开发全自动调平试验系统,对建筑物的基础平整度进行测试和评估。该系统将使用传感器和控制器来监测基础表面的任何不平和振动,并将为用户提供实时数据和报告。二、研究内容和方法本项目的研究工作将分为三个主要部分:1.系统设计和制造在

全自动调平试验系统研究.docx
全自动调平试验系统研究全自动调平试验系统研究摘要:本文主要研究全自动调平试验系统的设计和优化。通过对系统结构、控制算法和实验数据进行分析和研究,提出了一种全自动调平试验系统实现自动检测和调节的方法。实验结果表明,该系统能够有效地实现试验平衡性,提高试验准确性和可靠性。1.引言全自动调平试验系统用于对被测物进行平衡性测试,广泛应用于航空航天、汽车工程、机械工程等领域。传统的调平试验系统通常需要人工干预来实现试验平衡,但由于人的主观性和操作误差的影响,试验结果的准确性和可靠性有所限制。因此,实现全自动调平试验
自卸车调平用副车架调平液压控制系统.pdf
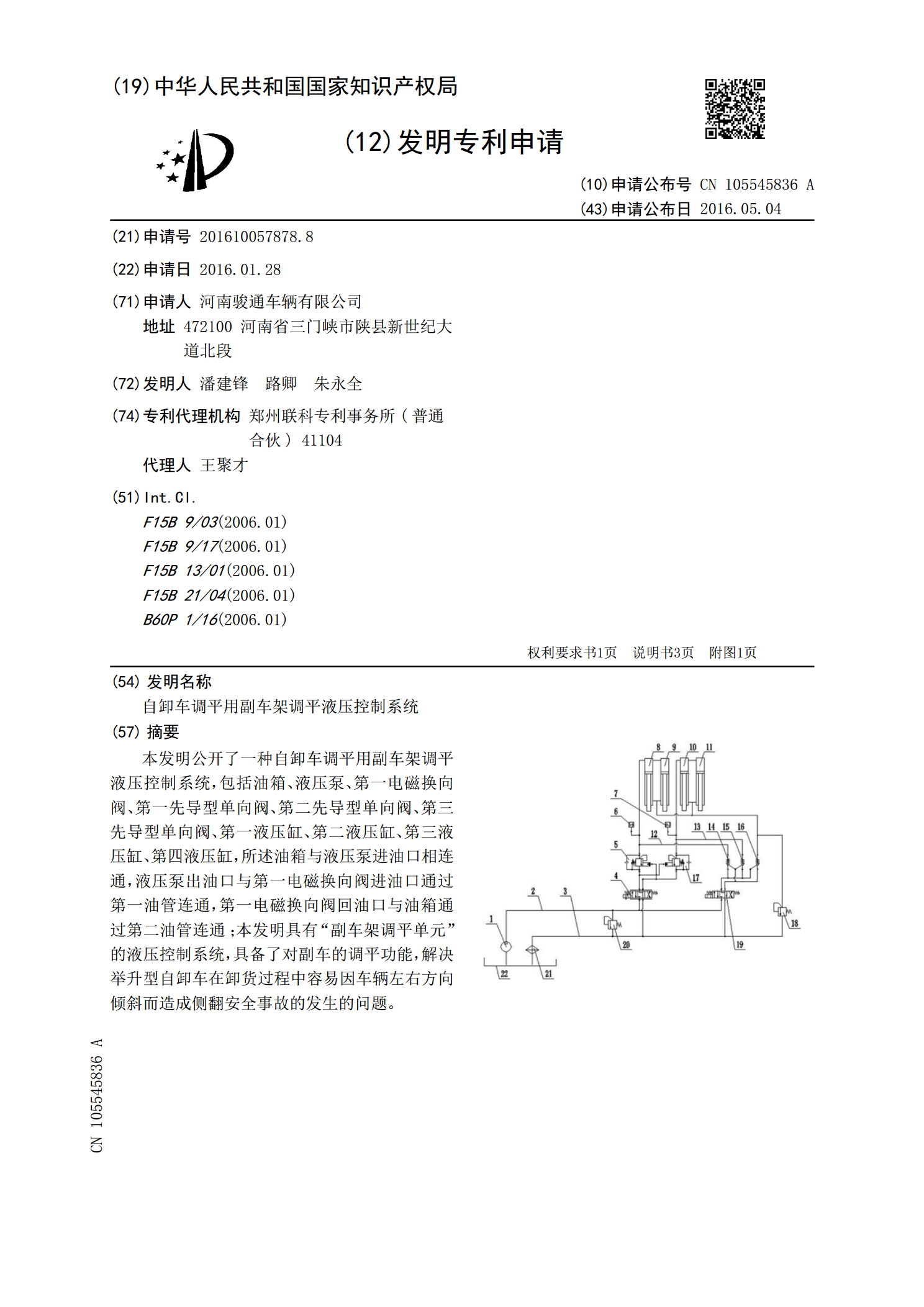
本发明公开了一种自卸车调平用副车架调平液压控制系统,包括油箱、液压泵、第一电磁换向阀、第一先导型单向阀、第二先导型单向阀、第三先导型单向阀、第一液压缸、第二液压缸、第三液压缸、第四液压缸,所述油箱与液压泵进油口相连通,液压泵出油口与第一电磁换向阀进油口通过第一油管连通,第一电磁换向阀回油口与油箱通过第二油管连通;本发明具有“副车架调平单元”的液压控制系统,具备了对副车的调平功能,解决举升型自卸车在卸货过程中容易因车辆左右方向倾斜而造成侧翻安全事故的发生的问题。