
行星轮系式RCM机构.pdf

一只****呀盟


1/7

2/7
3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
行星轮系式RCM机构.pdf
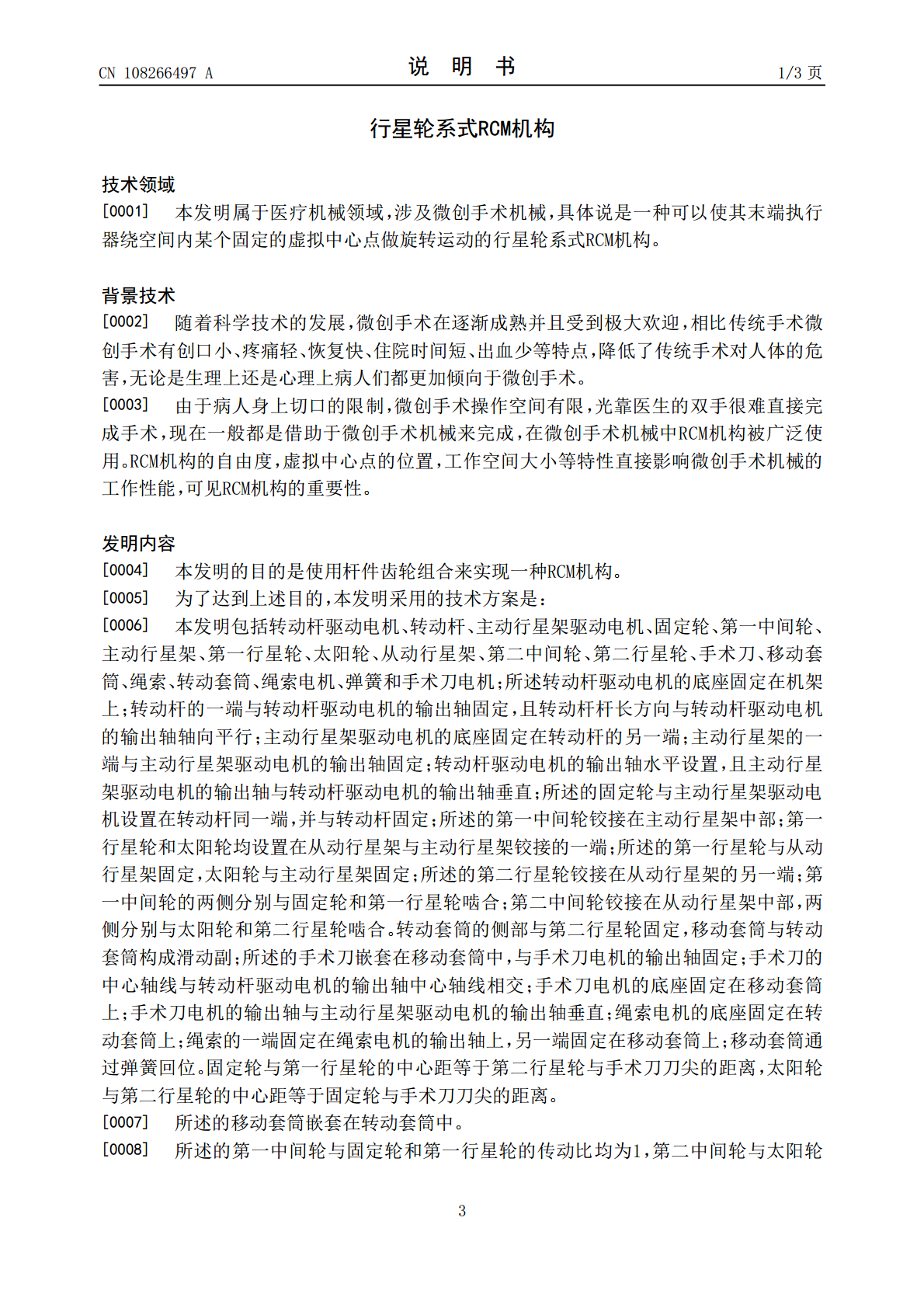
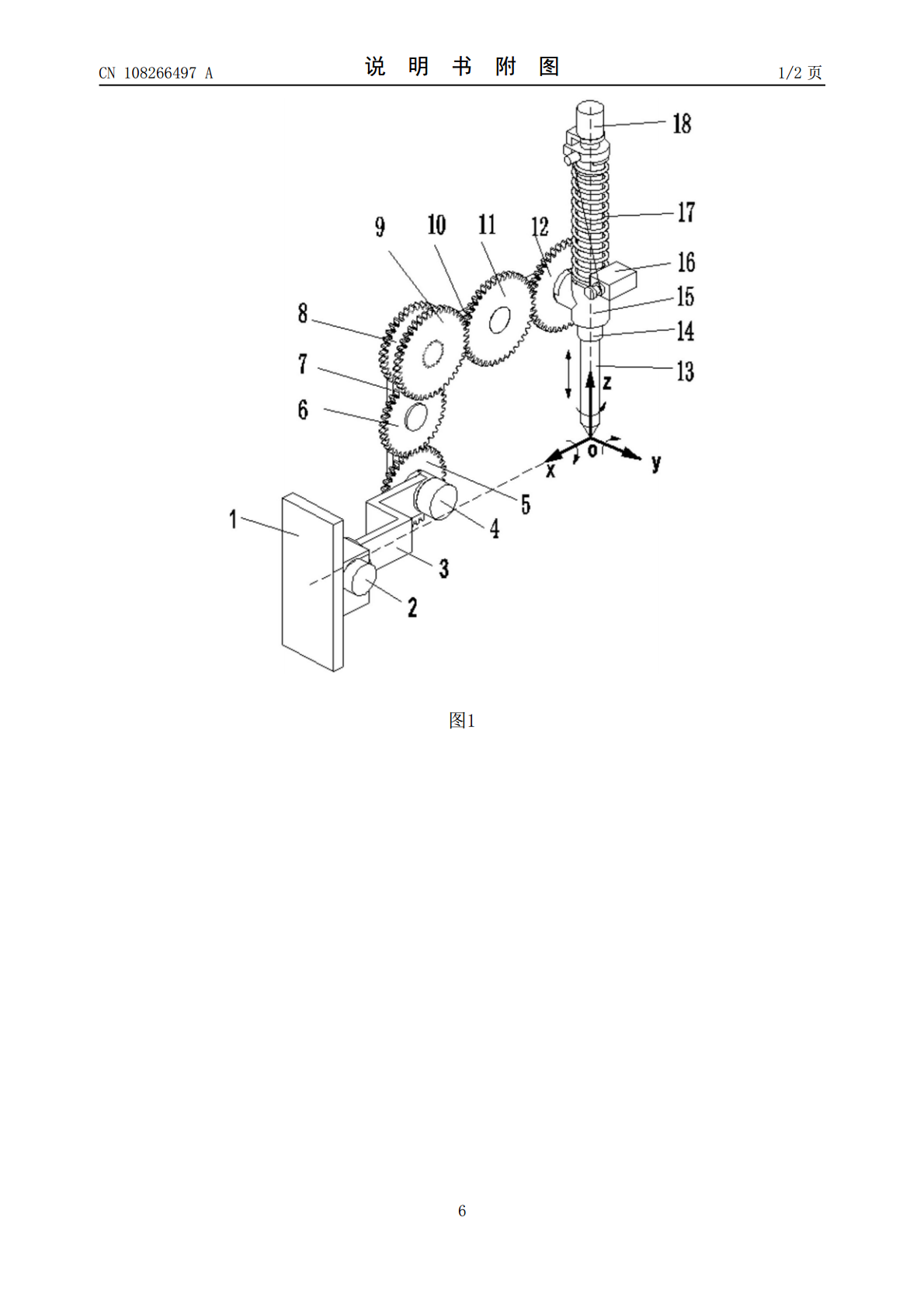
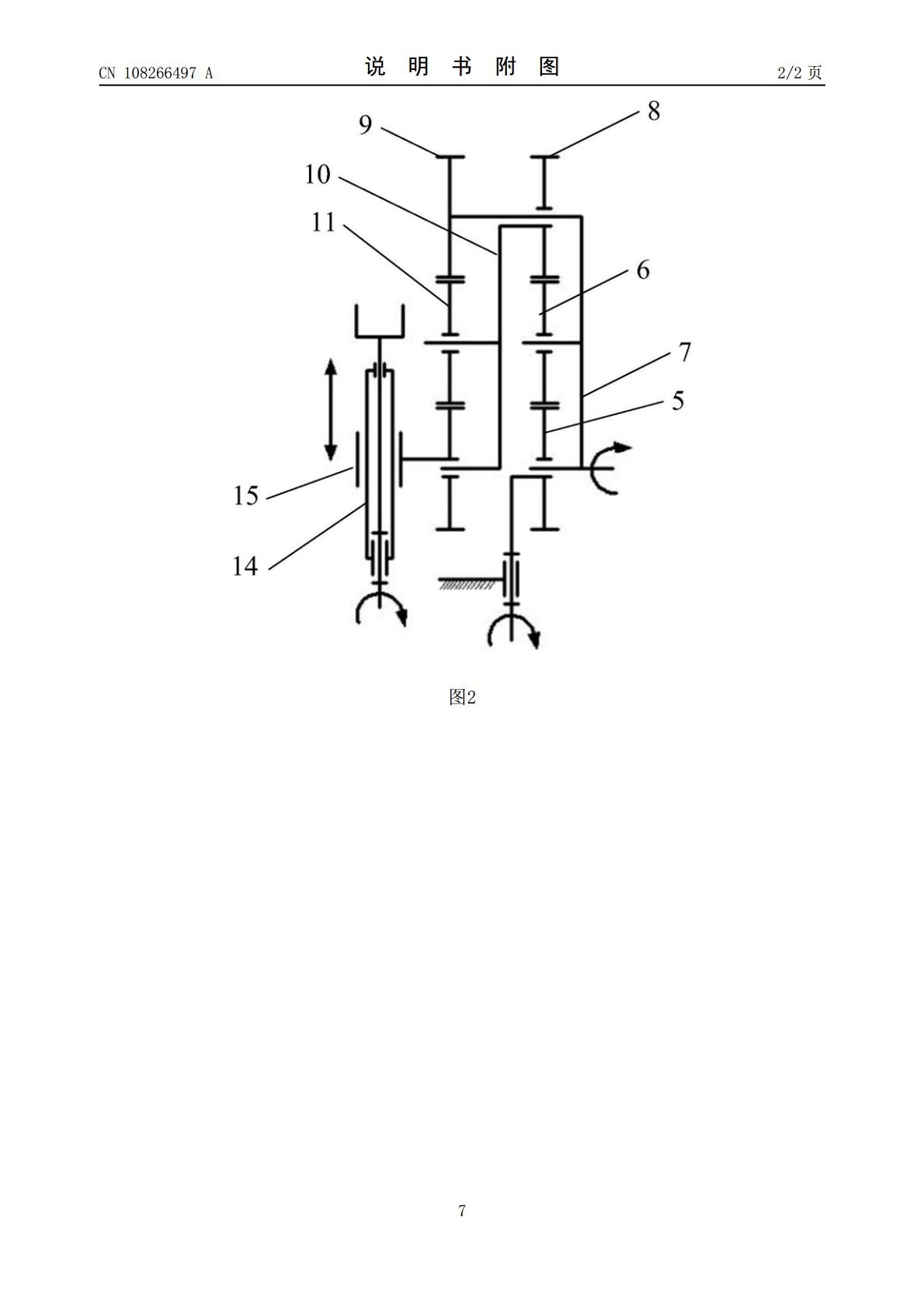
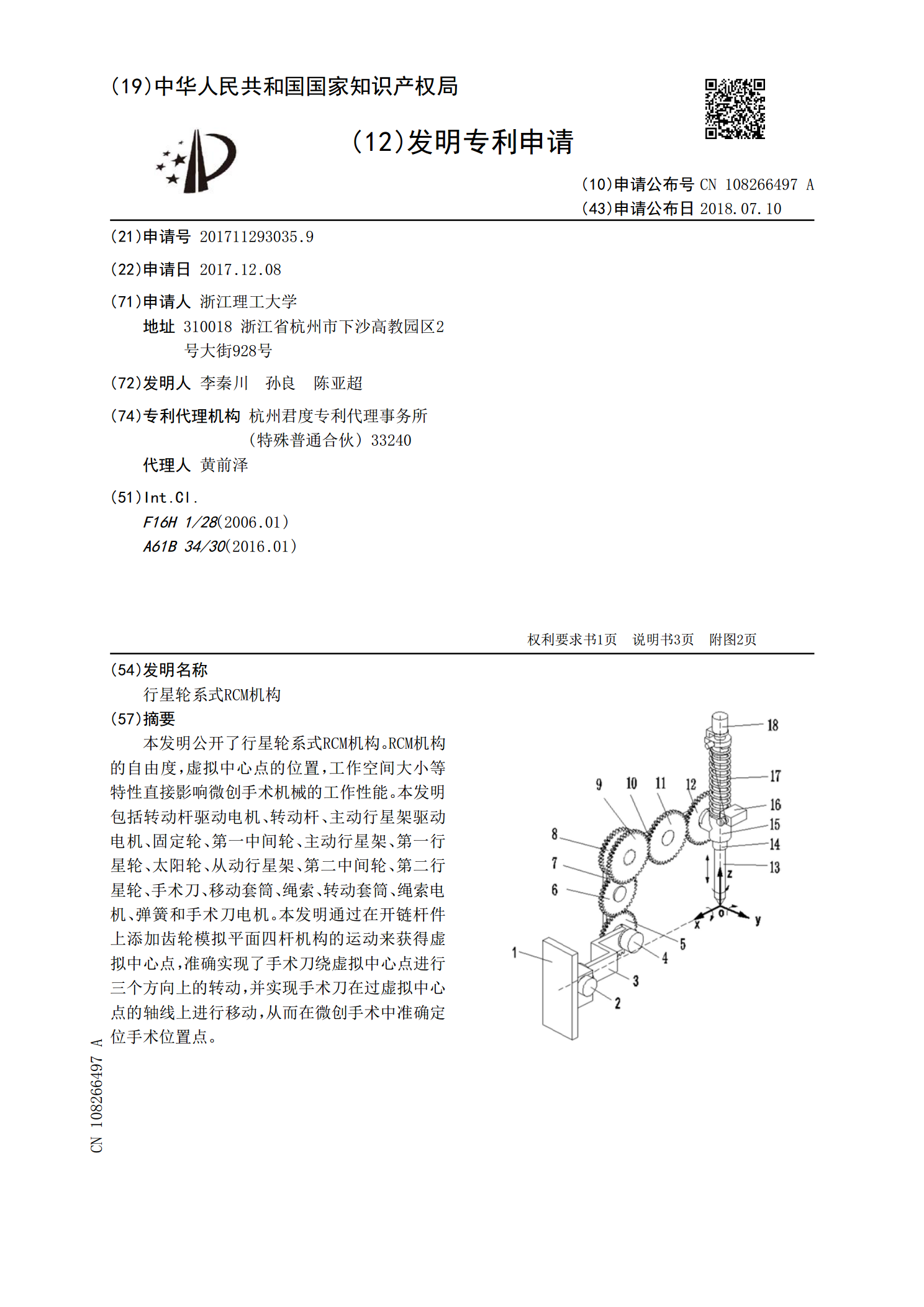
本发明公开了行星轮系式RCM机构。RCM机构的自由度,虚拟中心点的位置,工作空间大小等特性直接影响微创手术机械的工作性能。本发明包括转动杆驱动电机、转动杆、主动行星架驱动电机、固定轮、第一中间轮、主动行星架、第一行星轮、太阳轮、从动行星架、第二中间轮、第二行星轮、手术刀、移动套筒、绳索、转动套筒、绳索电机、弹簧和手术刀电机。本发明通过在开链杆件上添加齿轮模拟平面四杆机构的运动来获得虚拟中心点,准确实现了手术刀绕虚拟中心点进行三个方向上的转动,并实现手术刀在过虚拟中心点的轴线上进行移动,从而在微创手术中准确

二行星架八齿行星轮系式RCM机构.pdf
本发明属于医疗机械领域,涉及微创手术机械。目的是使杆件齿轮组合来实现一种RCM机构,该机构具有手术位置点定位准确、机构简单、设计及装配容易的特点。技术方案是:二行星架八齿行星轮系式RCM机构,其特征在于该机构包括轴线相互平行的固定轮、第一中间轮、两个传动轮,第一行星轮、太阳轮、从动行星架、第二中间轮以及第二行星轮,还包括转动杆电机、转动杆、主动行星架电机、手术刀、转动套筒、移动套筒、弹簧、手术刀电机、绳索、绳索电机;所述的转动杆电机的底座安装在机架上,转动杆的一端与转动杆电机的输出轴固定,且转动杆的杆长方
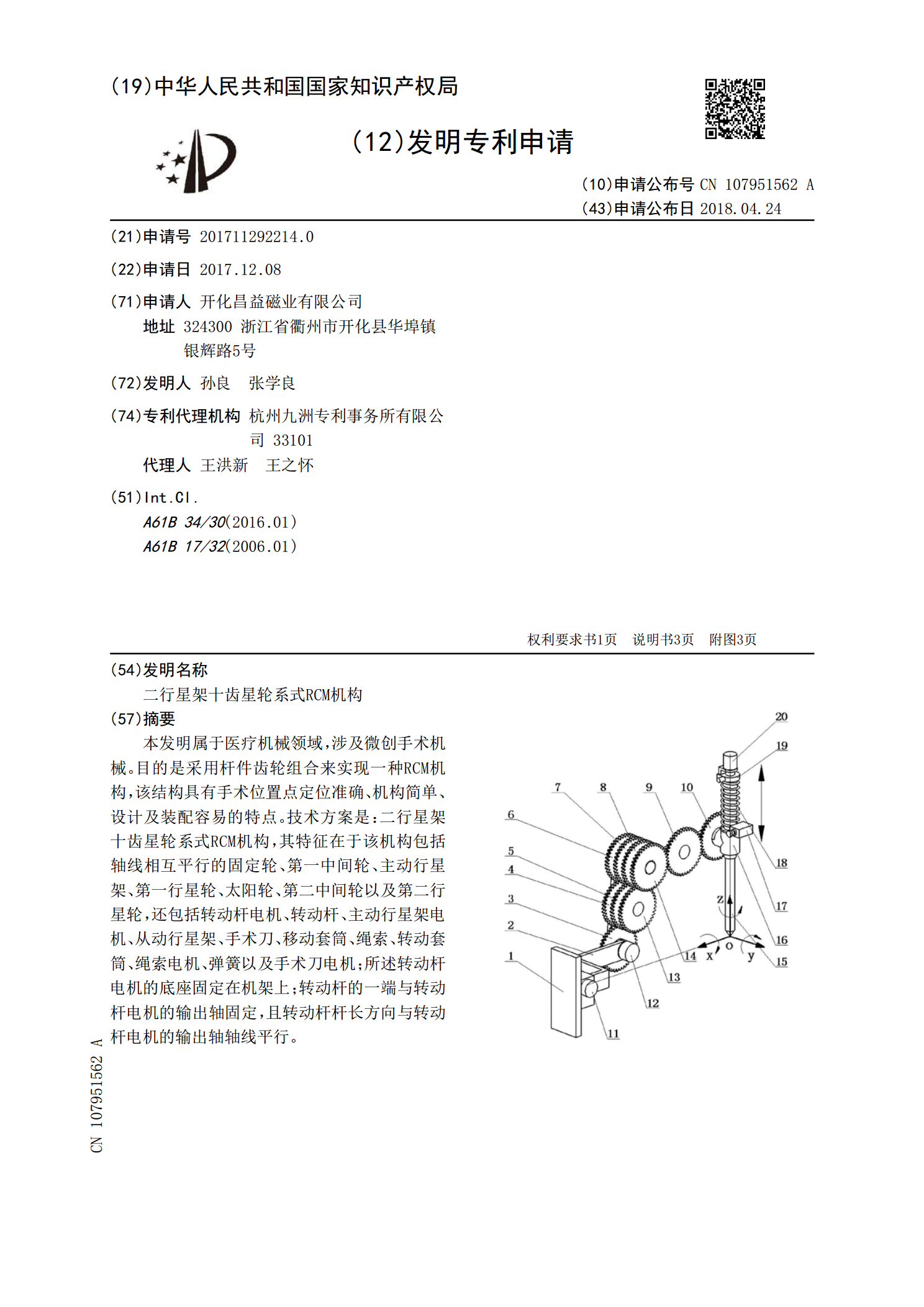
二行星架十齿星轮系式RCM机构.pdf
本发明属于医疗机械领域,涉及微创手术机械。目的是采用杆件齿轮组合来实现一种RCM机构,该结构具有手术位置点定位准确、机构简单、设计及装配容易的特点。技术方案是:二行星架十齿星轮系式RCM机构,其特征在于该机构包括轴线相互平行的固定轮、第一中间轮、主动行星架、第一行星轮、太阳轮、第二中间轮以及第二行星轮,还包括转动杆电机、转动杆、主动行星架电机、从动行星架、手术刀、移动套筒、绳索、转动套筒、绳索电机、弹簧以及手术刀电机;所述转动杆电机的底座固定在机架上;转动杆的一端与转动杆电机的输出轴固定,且转动杆杆长方向

远心点可变的轮系式RCM机构综合与设计.docx
远心点可变的轮系式RCM机构综合与设计远心点可变的轮系式RCM机构综合与设计摘要:随着机器人技术的发展,机器人在工业生产和服务领域的应用越来越广泛。其中,远心点可变的轮系式RCM机构作为一种新型的机器人结构,具有较高的自由度和灵活性,成为研究的热点。本文首先对RCM机构的基本原理进行了介绍,然后针对远心点可变的轮系式RCM机构进行了综合与设计的研究,并通过实例分析验证了该机构的性能和优越性。关键词:机器人技术、RCM机构、远心点可变、轮系1.引言机器人技术的发展已经深入到了各行各业,成为推动社会进步的重要

三行星架十齿第二行星架二级行星轮系式RCM机构.pdf
本发明属于医疗机械领域,涉及微创手术机械。目的是提供一种平面轮系式3R1T的RCM机构,该结构具有手术位置点定位准确、机构简单、设计及装配容易的特点。技术方案是:三行星架十齿第二行星架二级行星轮系式RCM机构,包括机架、转动杆、中间传动轮系、输入电机、转动电机、手术刀电机、绳索电机、手术刀滑道、套筒、弹簧、绳索、手术刀;所述的转动杆可转动地安装在机架上,固定于机架的转动电机驱使转动杆转动。