
高锁螺母安装机器人末端执行器及其高锁螺母安装方法.pdf

猫巷****永安


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
高锁螺母安装机器人末端执行器及其高锁螺母安装方法.pdf
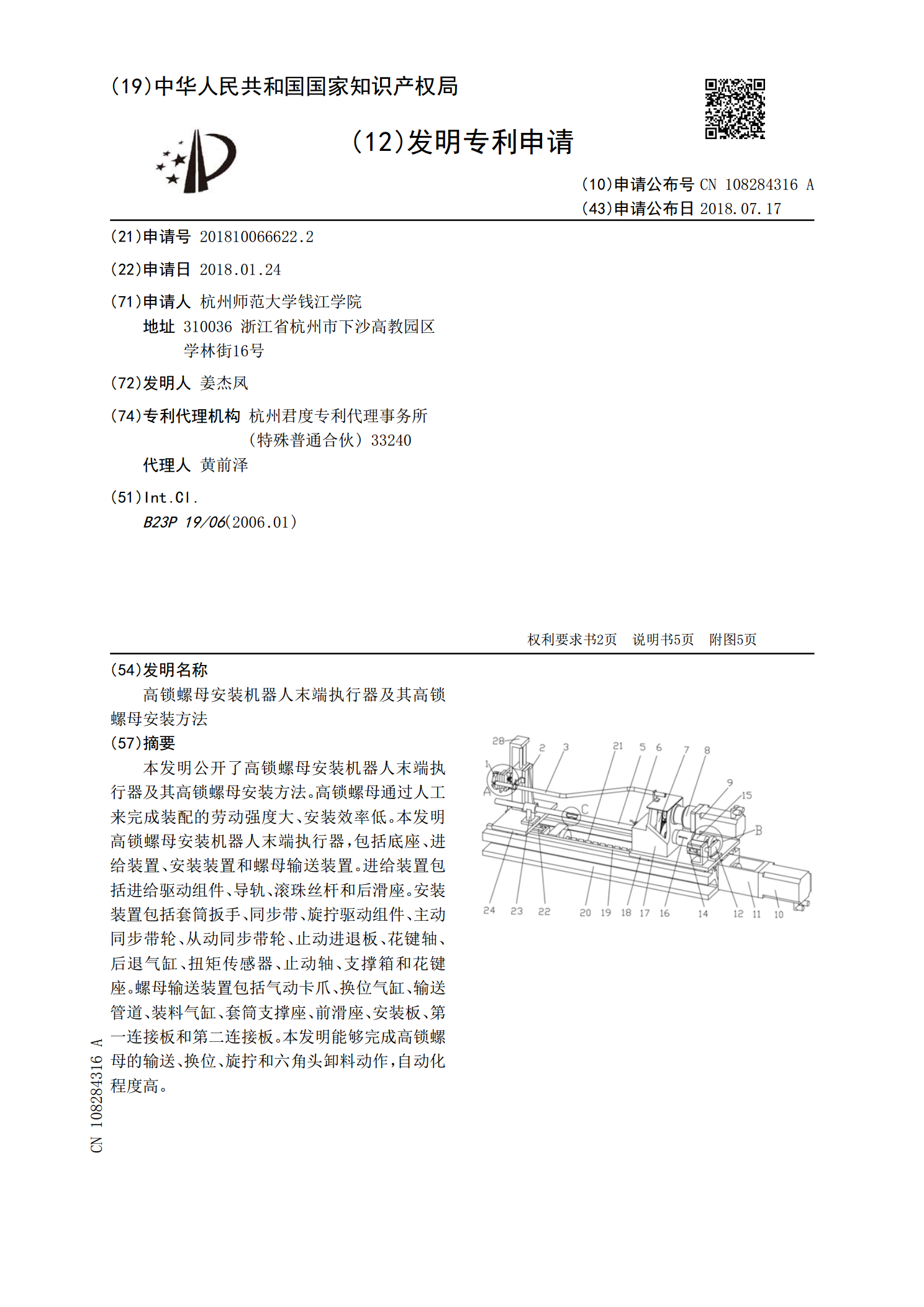
本发明公开了高锁螺母安装机器人末端执行器及其高锁螺母安装方法。高锁螺母通过人工来完成装配的劳动强度大、安装效率低。本发明高锁螺母安装机器人末端执行器,包括底座、进给装置、安装装置和螺母输送装置。进给装置包括进给驱动组件、导轨、滚珠丝杆和后滑座。安装装置包括套筒扳手、同步带、旋拧驱动组件、主动同步带轮、从动同步带轮、止动进退板、花键轴、后退气缸、扭矩传感器、止动轴、支撑箱和花键座。螺母输送装置包括气动卡爪、换位气缸、输送管道、装料气缸、套筒支撑座、前滑座、安装板、第一连接板和第二连接板。本发明能够完成高锁螺

一种电机叶轮锁螺母机及其锁螺母的方法.pdf
本发明公开了一种电机叶轮锁螺母机,包括双工位转盘、位于双工位转盘上且相对设置的人工上取料工位和锁螺母工位、以及控制双工位转盘和锁螺母工位运转的控制系统,锁螺母工位包括振动盘、与振动盘连接的直线送料器、位于所述直线送料器自由端上的机械手、在机械手带动下左右切离的锁螺母机构,锁螺母机构的底端设有定位及防止叶轮转动机构。本发明的电机叶轮锁螺母机只需要一个操纵人员在转盘上人工位往治具上放入电机叶轮半成品,锁螺母工位由振动盘和直线送料器实现上料,再由锁螺母机构、定位及防止叶轮转动机构和机械手配套实现锁螺母,在控制系
一种高锁螺母自动加工装置及其加工方法.pdf
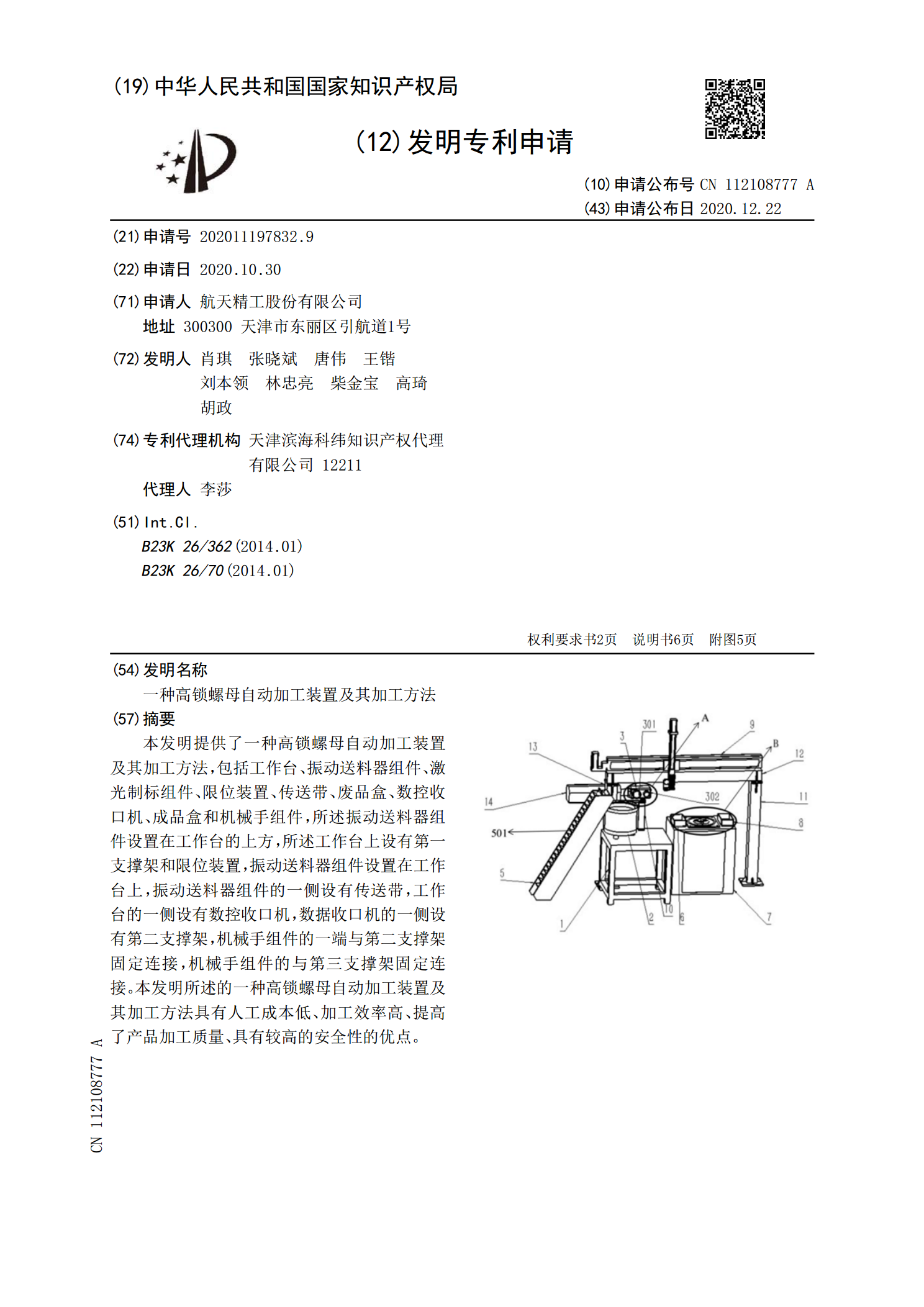
本发明提供了一种高锁螺母自动加工装置及其加工方法,包括工作台、振动送料器组件、激光制标组件、限位装置、传送带、废品盒、数控收口机、成品盒和机械手组件,所述振动送料器组件设置在工作台的上方,所述工作台上设有第一支撑架和限位装置,振动送料器组件设置在工作台上,振动送料器组件的一侧设有传送带,工作台的一侧设有数控收口机,数据收口机的一侧设有第二支撑架,机械手组件的一端与第二支撑架固定连接,机械手组件的与第三支撑架固定连接。本发明所述的一种高锁螺母自动加工装置及其加工方法具有人工成本低、加工效率高、提高了产品加工

不同因素对高锁螺母锁紧力矩影响的研究.docx
不同因素对高锁螺母锁紧力矩影响的研究高锁螺母广泛应用于各种机械设备和结构中,这些螺母都需要具有足够的锁紧力矩以确保设备或结构的稳定和安全。然而,高锁螺母的锁紧力矩会受到多种因素的影响,本文将对不同因素对高锁螺母锁紧力矩的影响进行研究。一、螺纹槽口类型高锁螺母锁紧力矩的大小与螺纹槽口类型有关。螺母表面的螺纹槽有多种形状,如U型、V型、三角形等。实验表明,U型螺纹槽的高锁螺母比其他类型的螺纹槽的螺母需要更大的锁紧力矩才能达到相同的锁紧效果。因此,在选择高锁螺母时,应注意螺纹槽的类型,选择适合的螺母以在保证稳定

高锁螺母拧断力矩及拧断槽尺寸计算方法研究.docx
高锁螺母拧断力矩及拧断槽尺寸计算方法研究高锁螺母是一种具有较大拧断力矩的紧固件,常用于需要承受大拉力的场合。在实际工程中,需要对高锁螺母的拧断力矩进行计算,并设计合适的拧断槽尺寸以保证紧固件的牢固性和可靠性。本文将对高锁螺母拧断力矩及拧断槽尺寸的计算方法进行研究。首先,需要了解高锁螺母的结构。高锁螺母一般由螺母本体和拧断槽两部分组成。螺母本体采用特殊的形状设计,通过对槽的限制使螺母与螺栓之间产生额外的摩擦力,从而增加了紧固力的传递面积,提高了螺母的拧断力矩。而拧断槽则是用来限制螺母在拧紧过程中的转动,保证