
一种基于物联网的多功能的智能医疗机器人.pdf

绮兰****文章


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于物联网的多功能的智能医疗机器人.pdf
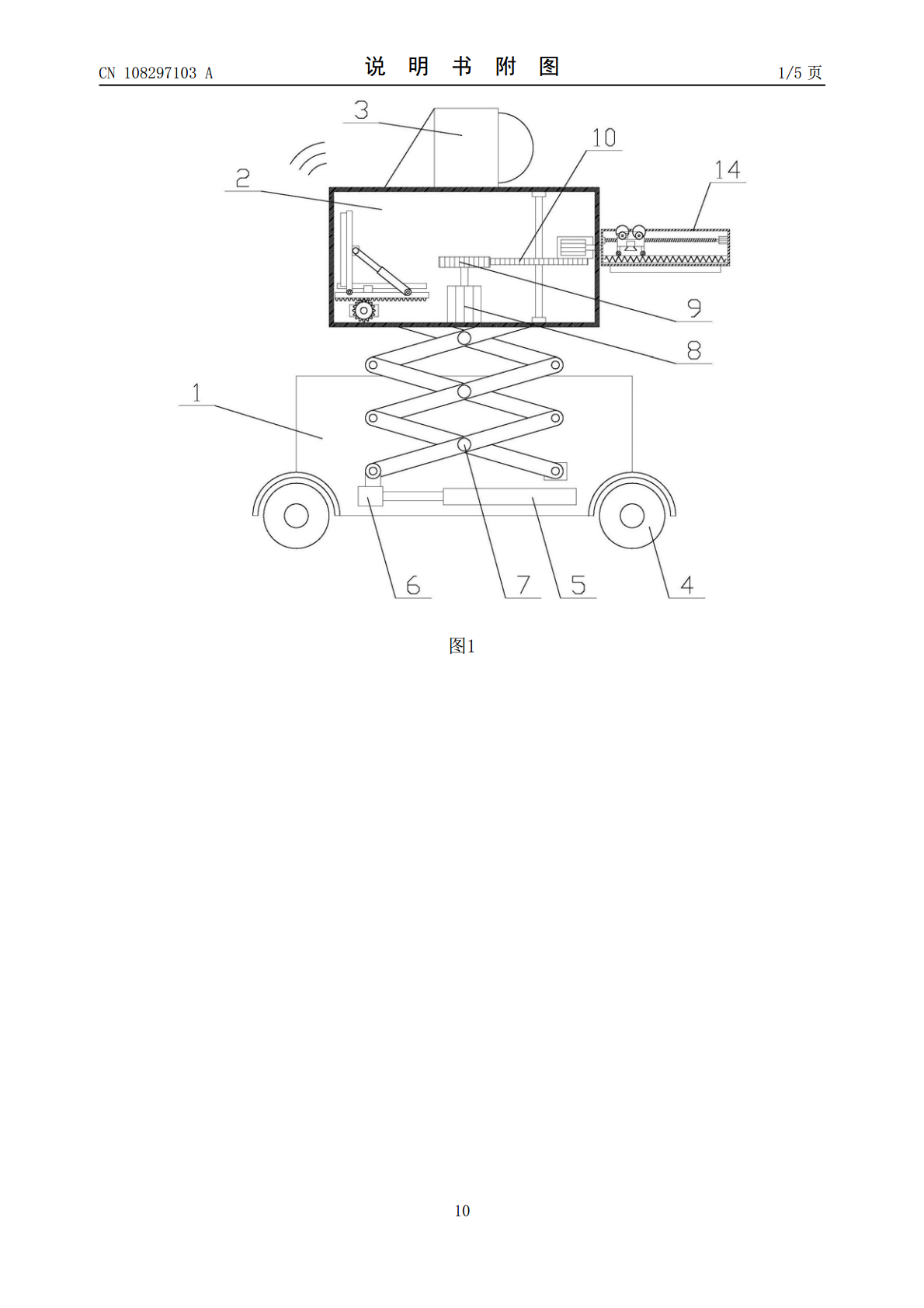
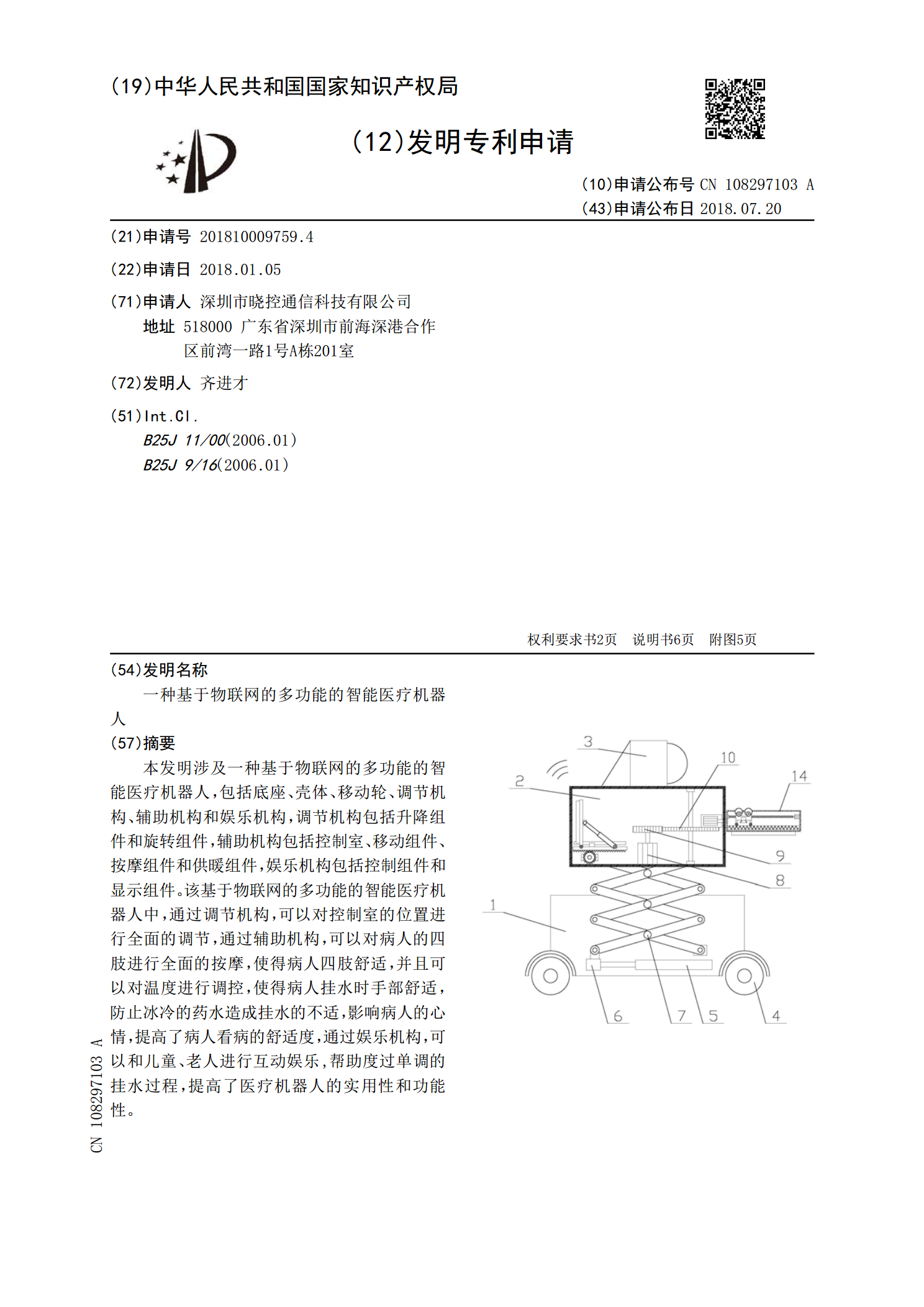
本发明涉及一种基于物联网的多功能的智能医疗机器人,包括底座、壳体、移动轮、调节机构、辅助机构和娱乐机构,调节机构包括升降组件和旋转组件,辅助机构包括控制室、移动组件、按摩组件和供暖组件,娱乐机构包括控制组件和显示组件。该基于物联网的多功能的智能医疗机器人中,通过调节机构,可以对控制室的位置进行全面的调节,通过辅助机构,可以对病人的四肢进行全面的按摩,使得病人四肢舒适,并且可以对温度进行调控,使得病人挂水时手部舒适,防止冰冷的药水造成挂水的不适,影响病人的心情,提高了病人看病的舒适度,通过娱乐机构,可以和儿
一种基于物联网的智能医疗机器人.pdf
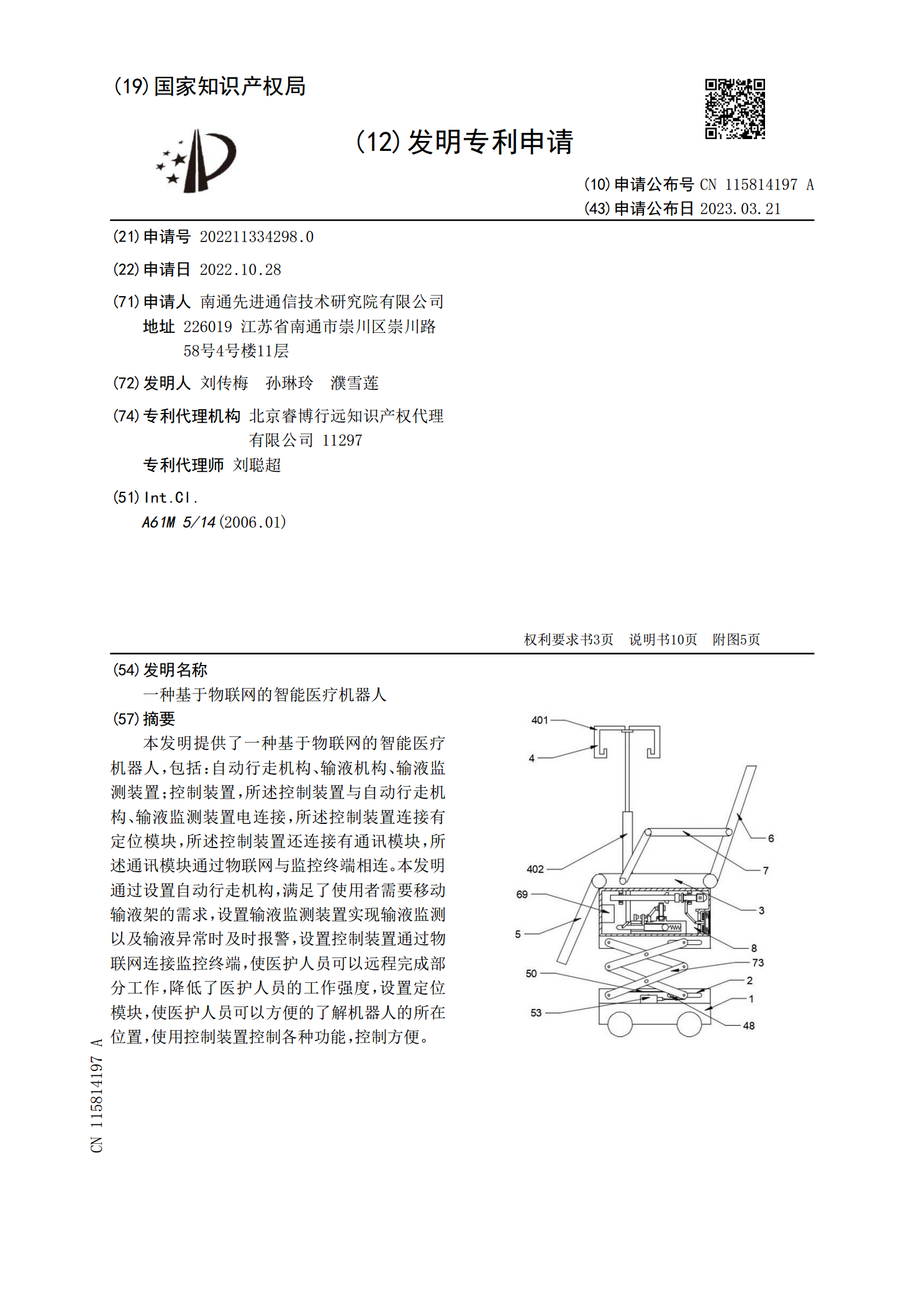
本发明提供了一种基于物联网的智能医疗机器人,包括:自动行走机构、输液机构、输液监测装置;控制装置,所述控制装置与自动行走机构、输液监测装置电连接,所述控制装置连接有定位模块,所述控制装置还连接有通讯模块,所述通讯模块通过物联网与监控终端相连。本发明通过设置自动行走机构,满足了使用者需要移动输液架的需求,设置输液监测装置实现输液监测以及输液异常时及时报警,设置控制装置通过物联网连接监控终端,使医护人员可以远程完成部分工作,降低了医护人员的工作强度,设置定位模块,使医护人员可以方便的了解机器人的所在位置,使用

一种基于物联网的用于多功能浇水的智能机器人.pdf
本发明涉及一种基于物联网的用于多功能浇水的智能机器人,包括底座、第一电机、转轴、弯曲机构、两个机械臂机构、两个推拉机构和两个移动机构,第一电机设置在底座内,第一电机与转轴传动连接,弯曲机构设置在转轴的上方,两个推拉机构分别设置在转轴的两侧,推拉机构与机械臂机构传动连接,两个移动机构分别设置在底座下方的两侧,该基于物联网的用于多功能浇水的智能机器人,通过转动组件、驱动组件和从动组件来调节浇水角度,从而适应各种情况下的浇水需求,通过移动机构可以扩大浇水范围,提升了机动性,使该产品更加符合现在的市场需求。
一种基于物联网的用于打磨的多功能智能机器人.pdf
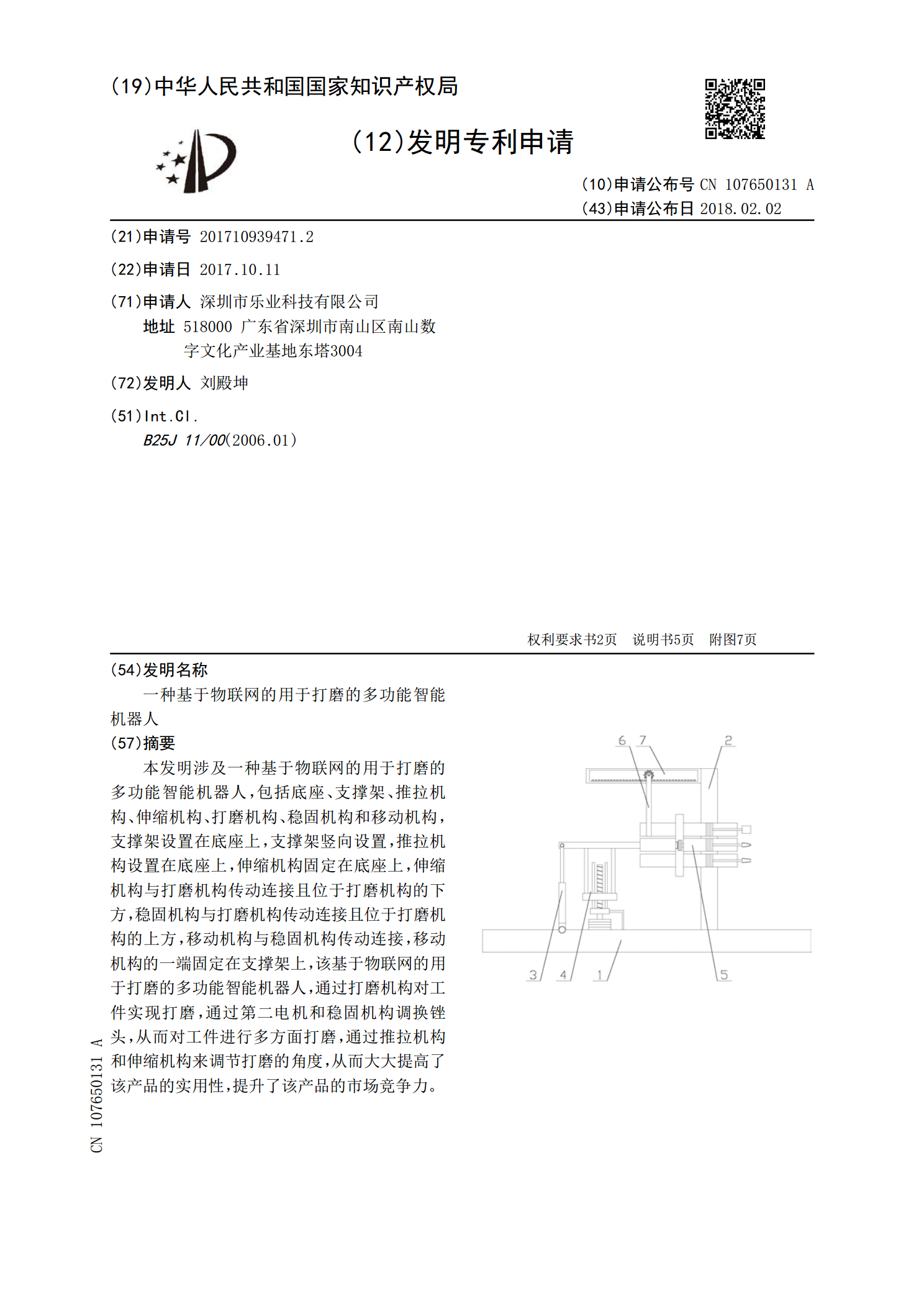
本发明涉及一种基于物联网的用于打磨的多功能智能机器人,包括底座、支撑架、推拉机构、伸缩机构、打磨机构、稳固机构和移动机构,支撑架设置在底座上,支撑架竖向设置,推拉机构设置在底座上,伸缩机构固定在底座上,伸缩机构与打磨机构传动连接且位于打磨机构的下方,稳固机构与打磨机构传动连接且位于打磨机构的上方,移动机构与稳固机构传动连接,移动机构的一端固定在支撑架上,该基于物联网的用于打磨的多功能智能机器人,通过打磨机构对工件实现打磨,通过第二电机和稳固机构调换锉头,从而对工件进行多方面打磨,通过推拉机构和伸缩机构来调
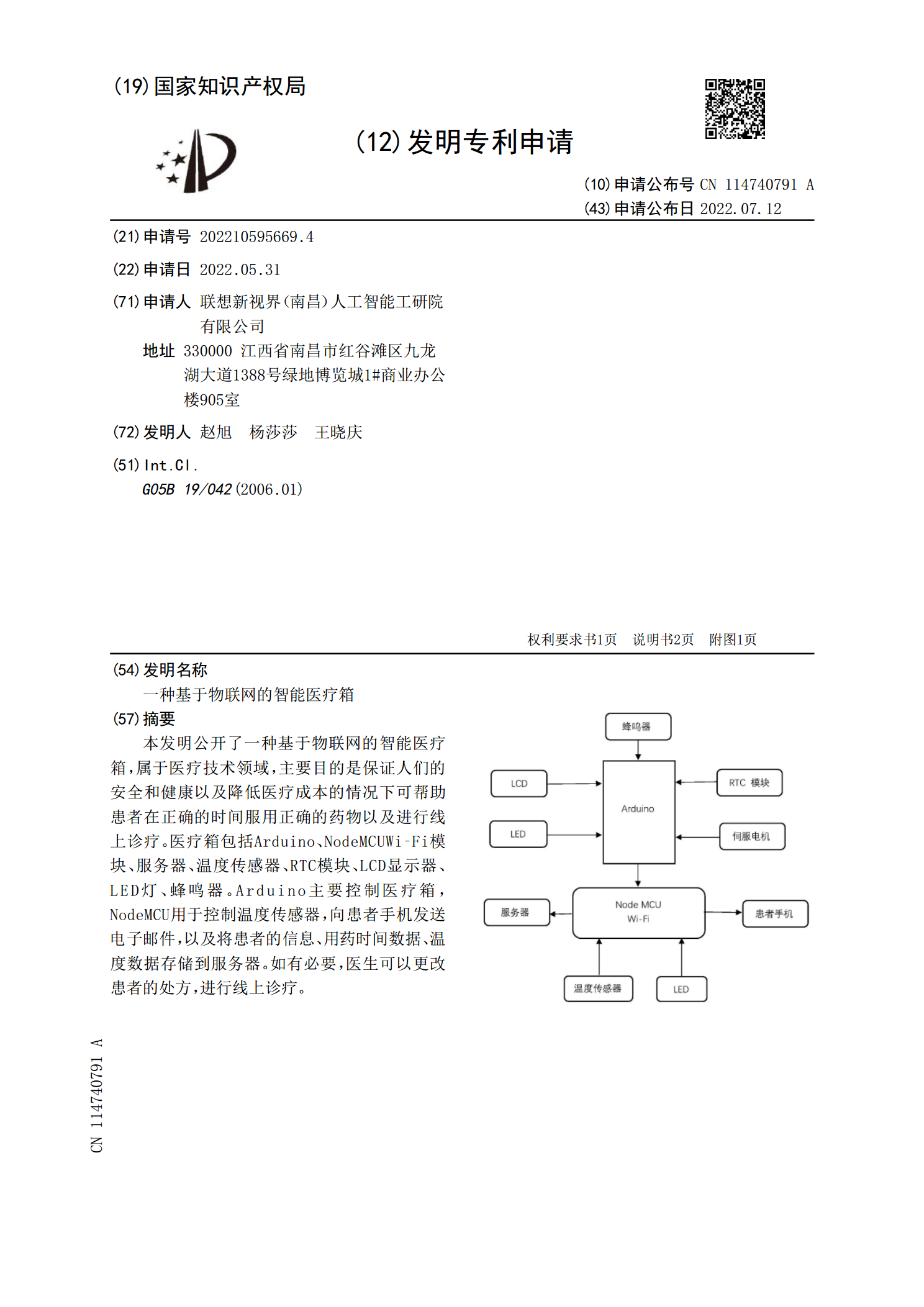
一种基于物联网的智能医疗箱.pdf
本发明公开了一种基于物联网的智能医疗箱,属于医疗技术领域,主要目的是保证人们的安全和健康以及降低医疗成本的情况下可帮助患者在正确的时间服用正确的药物以及进行线上诊疗。医疗箱包括Arduino、NodeMCUWi‑Fi模块、服务器、温度传感器、RTC模块、LCD显示器、LED灯、蜂鸣器。Arduino主要控制医疗箱,NodeMCU用于控制温度传感器,向患者手机发送电子邮件,以及将患者的信息、用药时间数据、温度数据存储到服务器。如有必要,医生可以更改患者的处方,进行线上诊疗。