
基于视觉清晰度与轮廓提取的熔池图像异常检测方法.pdf

书生****aa

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于视觉清晰度与轮廓提取的熔池图像异常检测方法.pdf
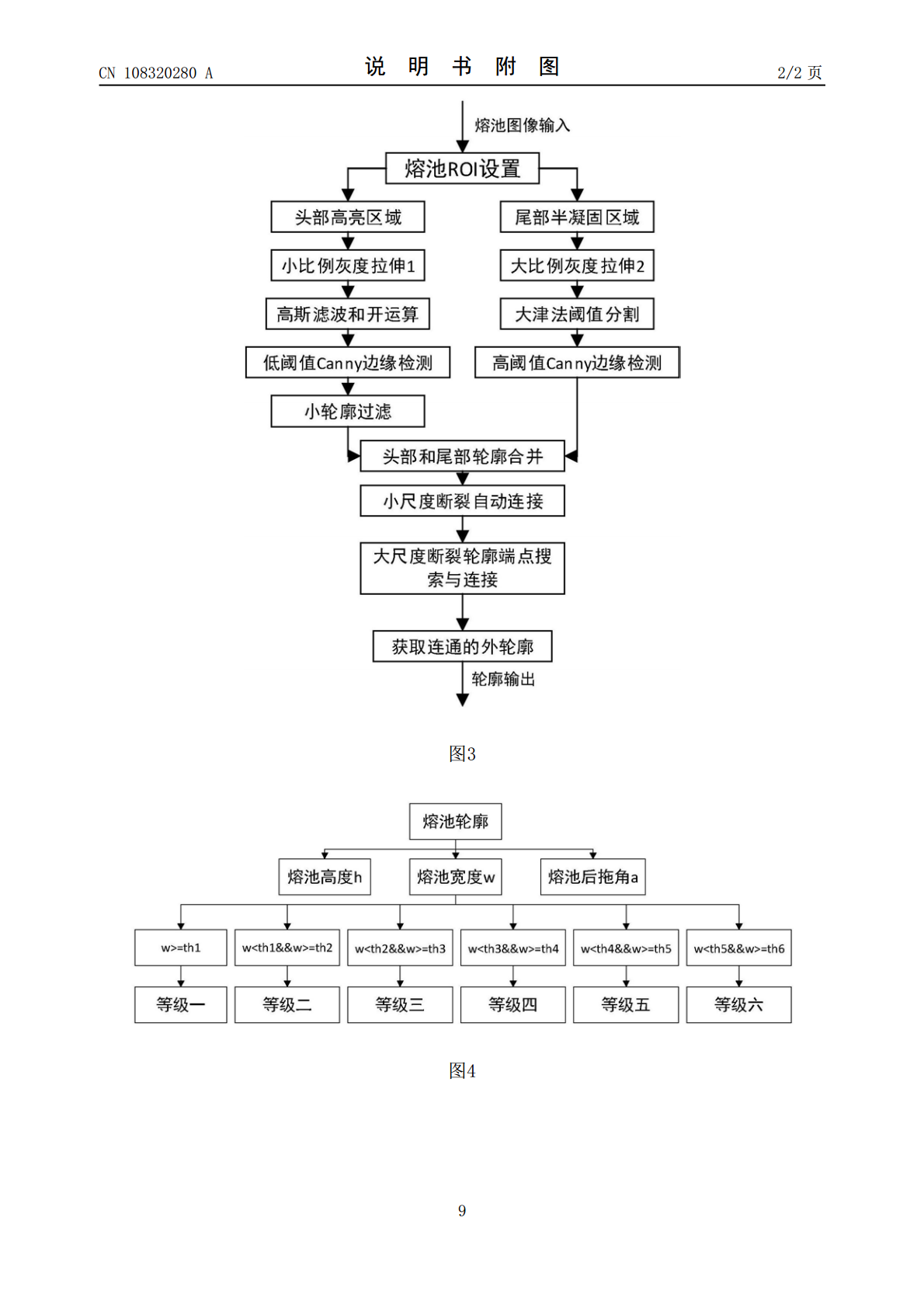
本发明提出了一种根据视觉清晰度的值与轮廓的宽度的变化从而判别该熔池图像所属异常类别的检测方法;本发明从图像视觉角度出发,结合清晰度以及轮廓提取的运算特性,先用清晰度算子进行初分类,再结合轮廓宽度对焊速进行再分类,在一定程度上减小了运算时间。且本发明所采用双光路视觉感知装置,有效的提高视觉轮廓和清晰度提取精度。
基于视觉清晰度与轮廓提取的熔池图像异常检测方法.pdf
本发明提出了一种根据视觉清晰度的值与轮廓的宽度的变化从而判别该熔池图像所属异常类别的检测方法;本发明从图像视觉角度出发,结合清晰度以及轮廓提取的运算特性,先用清晰度算子进行初分类,再结合轮廓宽度对焊速进行再分类,在一定程度上减小了运算时间。且本发明所采用双光路视觉感知装置,有效的提高视觉轮廓和清晰度提取精度。

基于早期认知视觉的图像轮廓提取.docx
基于早期认知视觉的图像轮廓提取论文标题:基于早期认知视觉的图像轮廓提取摘要:图像轮廓提取是计算机视觉领域中一个重要的任务,其在目标检测、图像分割和图像识别等应用中扮演着关键角色。本论文旨在探讨基于早期认知视觉的图像轮廓提取方法,以提高轮廓提取的精确度和鲁棒性。首先介绍图像轮廓提取的背景和意义,然后讨论早期认知视觉的概念,接着详细阐述基于早期认知视觉的图像轮廓提取方法,并通过实验结果验证其有效性。最后,总结本文的研究成果并展望未来的研究方向。关键词:图像轮廓提取,早期认知视觉,边缘检测,图像分割,计算机视觉
一种基于视觉模型的图像轮廓提取方法.pdf
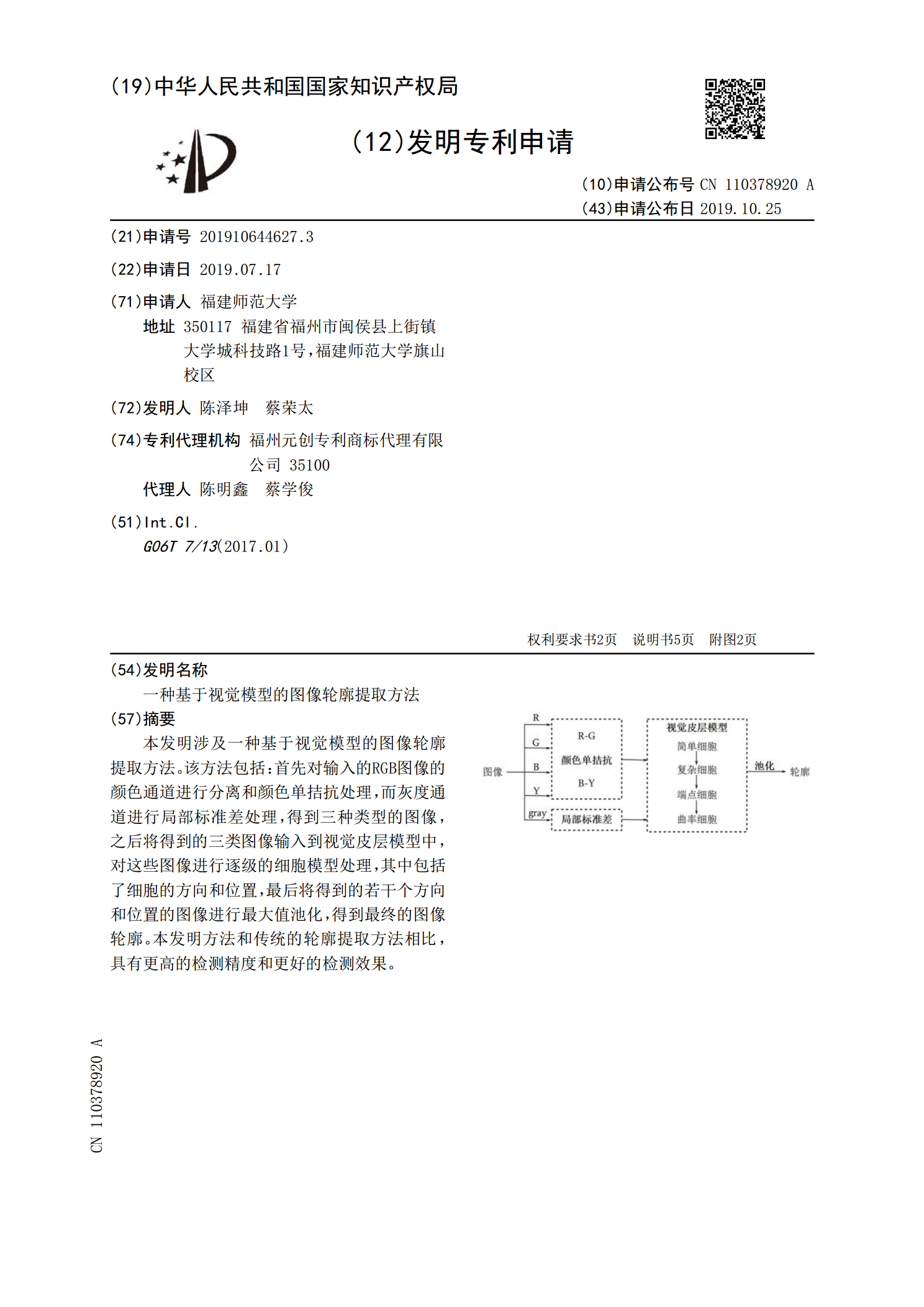
本发明涉及一种基于视觉模型的图像轮廓提取方法。该方法包括:首先对输入的RGB图像的颜色通道进行分离和颜色单拮抗处理,而灰度通道进行局部标准差处理,得到三种类型的图像,之后将得到的三类图像输入到视觉皮层模型中,对这些图像进行逐级的细胞模型处理,其中包括了细胞的方向和位置,最后将得到的若干个方向和位置的图像进行最大值池化,得到最终的图像轮廓。本发明方法和传统的轮廓提取方法相比,具有更高的检测精度和更好的检测效果。

一种焊接熔池图像轮廓实时提取方法.pdf
本发明公开了一种焊接熔池图像轮廓实时提取方法,涉及焊接领域,采用高速相机获取焊接过程的连续熔池图像,根据拍摄帧频和熔池流动特性确定参与计算的图像帧数,计算连续图像中每个像素的灰度值变异系数得到变异系数图像,对变异系数图像低通滤波后绘制灰度直方图,对灰度直方图采用峰值右侧直线拟合法确定图像分割阈值,采用图像分割阈值对变异系数图像进行二值化分割,采用差分法提取熔池轮廓。本发明能够辅助高速摄像系统准确获得熔池轮廓,测量精度高、稳定性好,能有效克服成像系统差异和拍摄环境的影响,特别对于熔池与后方半凝固区没有显著色