
一种焊接熔池图像轮廓实时提取方法.pdf

朋兴****en

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种焊接熔池图像轮廓实时提取方法.pdf
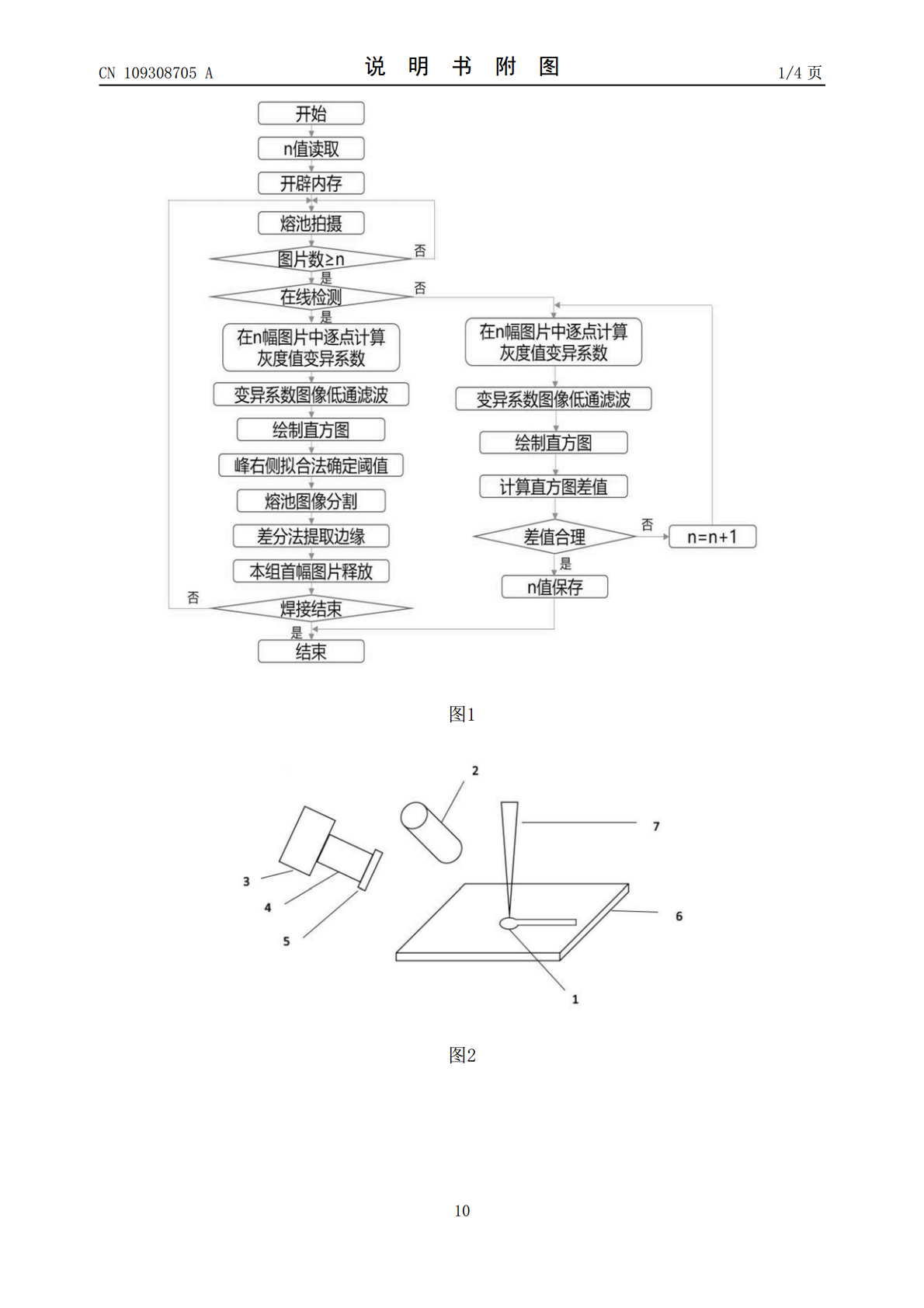
本发明公开了一种焊接熔池图像轮廓实时提取方法,涉及焊接领域,采用高速相机获取焊接过程的连续熔池图像,根据拍摄帧频和熔池流动特性确定参与计算的图像帧数,计算连续图像中每个像素的灰度值变异系数得到变异系数图像,对变异系数图像低通滤波后绘制灰度直方图,对灰度直方图采用峰值右侧直线拟合法确定图像分割阈值,采用图像分割阈值对变异系数图像进行二值化分割,采用差分法提取熔池轮廓。本发明能够辅助高速摄像系统准确获得熔池轮廓,测量精度高、稳定性好,能有效克服成像系统差异和拍摄环境的影响,特别对于熔池与后方半凝固区没有显著色
一种实现闭合连通域的熔池轮廓图像提取方法.pdf
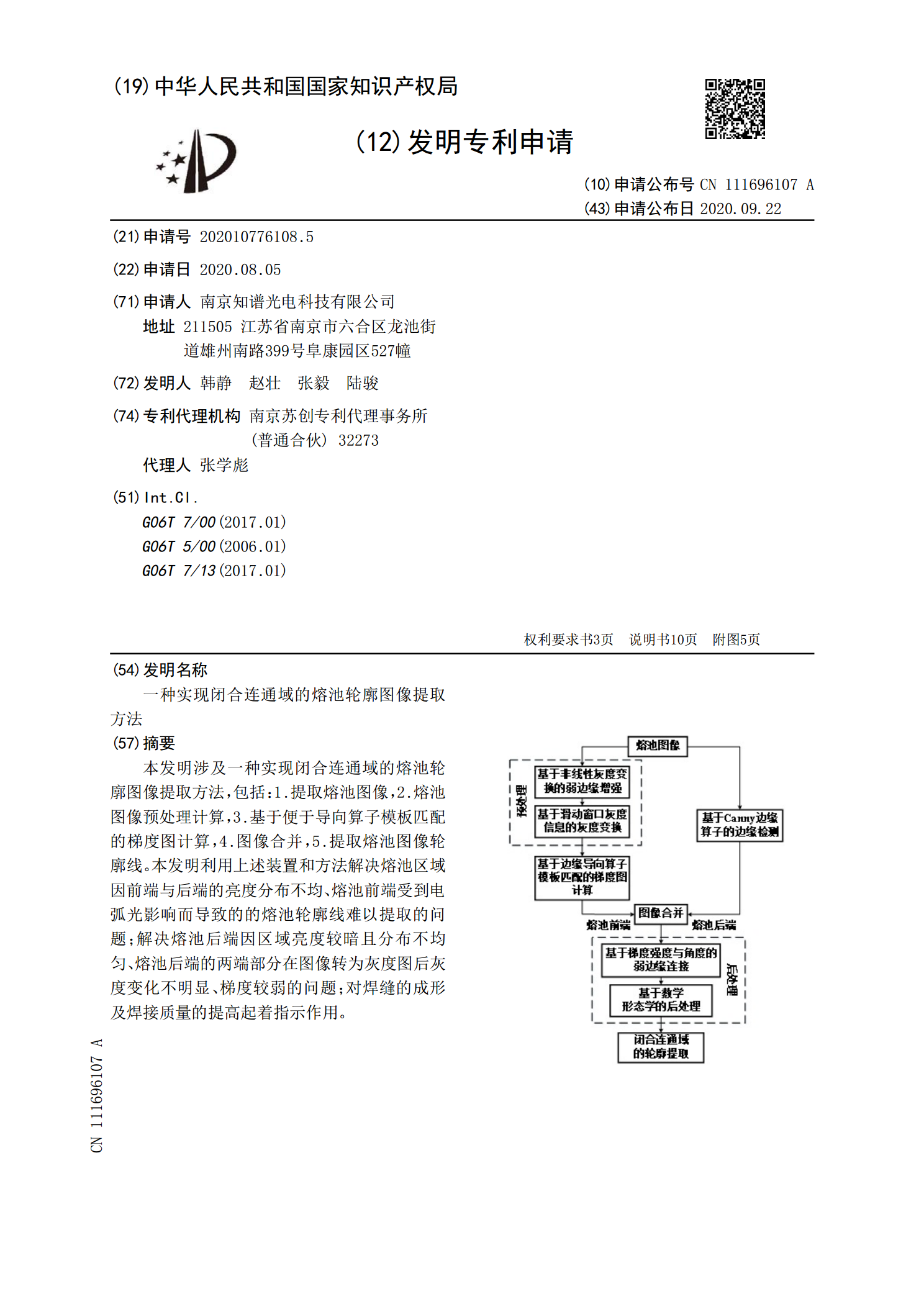
本发明涉及一种实现闭合连通域的熔池轮廓图像提取方法,包括:1.提取熔池图像,2.熔池图像预处理计算,3.基于便于导向算子模板匹配的梯度图计算,4.图像合并,5.提取熔池图像轮廓线。本发明利用上述装置和方法解决熔池区域因前端与后端的亮度分布不均、熔池前端受到电弧光影响而导致的的熔池轮廓线难以提取的问题;解决熔池后端因区域亮度较暗且分布不均匀、熔池后端的两端部分在图像转为灰度图后灰度变化不明显、梯度较弱的问题;对焊缝的成形及焊接质量的提高起着指示作用。

脑部MRI图像的半自动实时轮廓提取方法.docx
脑部MRI图像的半自动实时轮廓提取方法标题:基于深度学习的半自动实时脑部MRI图像轮廓提取方法摘要:脑部MRI图像在医学影像领域具有广泛的应用,对于脑部疾病的诊断与治疗非常重要。其中,脑部MRI图像的轮廓提取是一项基础任务,它可以用于定量分析和可视化显示。本文提出了一种基于深度学习的半自动实时脑部MRI图像轮廓提取方法,通过引入深度学习模型和交互式过程,提高了轮廓提取的准确性和效率。1.引言脑部MRI图像的轮廓提取对于脑部疾病的研究和诊断具有重要意义。传统的手工提取方法通常需要大量的人力和时间,且受到主观
图像的轮廓提取方法和轮廓提取装置.pdf
本申请公开了一种图像的轮廓提取方法和轮廓提取装置。其中,图像的轮廓提取方法包括:在图像中选取中心像素,其中中心像素为图像中不处于边界位置的任意像素;获取以中心像素为中心的像素矩阵,像素矩阵为三阶方阵;获取像素矩阵中各像素的亮度值形成亮度矩阵,亮度矩阵为三阶方阵;基于亮度矩阵与三阶算子的卷积运算结果得到结果矩阵;以及基于结果矩阵中各元素的值确定中心像素是否属于图像的轮廓。按照本申请的方案,能够准确地提取出图像中代表图像轮廓的像素,并可避免提取出非图像轮廓的噪点。
基于视觉清晰度与轮廓提取的熔池图像异常检测方法.pdf
本发明提出了一种根据视觉清晰度的值与轮廓的宽度的变化从而判别该熔池图像所属异常类别的检测方法;本发明从图像视觉角度出发,结合清晰度以及轮廓提取的运算特性,先用清晰度算子进行初分类,再结合轮廓宽度对焊速进行再分类,在一定程度上减小了运算时间。且本发明所采用双光路视觉感知装置,有效的提高视觉轮廓和清晰度提取精度。