
激光引导扫描系统及扫描方法.pdf

努力****恨风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

激光引导扫描系统及扫描方法.pdf
本发明公开了一种激光引导扫描系统及扫描方法,系统包括:处理器,用于根据对象第一次拍摄的第一张照片确定激光中心坐标和相对宽度,确定在第一次拍摄之后的后续拍摄中拍摄一张或多张照片的精确位置,以及对拍摄的第一张照片和后续拍摄的所述一张或多张照片进行拼接和处理,以生成对象的扫描图像的至少一个三维模型;反馈模块,用于提供所述精确位置的至少一个反馈信号;运动控制模块,包含至少一个轮子,用于控制所述轮子根据所述反馈信号移动到所述的精确位置;一个或多个摄像头,用于逐张捕捉所述第一张照片和后续所述一张或多张照片。本发明具有
一种激光扫描系统、激光雷达及扫描方法.pdf
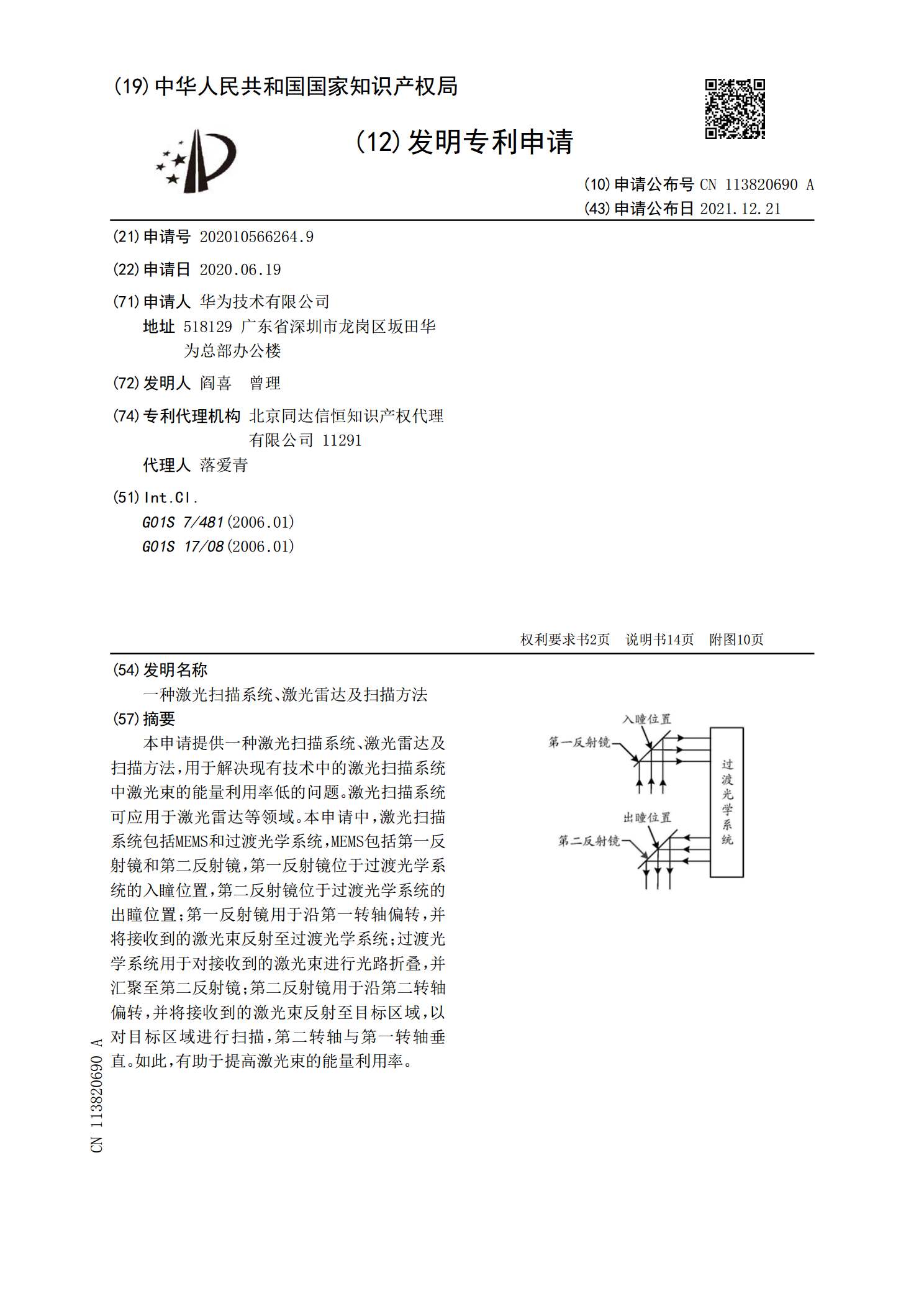
本申请提供一种激光扫描系统、激光雷达及扫描方法,用于解决现有技术中的激光扫描系统中激光束的能量利用率低的问题。激光扫描系统可应用于激光雷达等领域。本申请中,激光扫描系统包括MEMS和过渡光学系统,MEMS包括第一反射镜和第二反射镜,第一反射镜位于过渡光学系统的入瞳位置,第二反射镜位于过渡光学系统的出瞳位置;第一反射镜用于沿第一转轴偏转,并将接收到的激光束反射至过渡光学系统;过渡光学系统用于对接收到的激光束进行光路折叠,并汇聚至第二反射镜;第二反射镜用于沿第二转轴偏转,并将接收到的激光束反射至目标区域,以对

机载激光扫描系统.doc
如何快速、准确、有效地获取空间三维信息,是许多学者深入研究的课题。随着信息技术研究的深入及数字地球、数字城市、虚拟现实等概念的出现,尤其在当今以计算机技术为依托的信息时代,人们对空间三维信息的需求更加迫切。基于测距测角的传统工程测量方法,在理论、设备和应用等诸多方面都已相当成熟,新型的全站仪可以完成工业目标的高精度测量,GPS可以全天候、一天24小时精确定位全球任何位置的三维坐标,但它们多用于稀疏目标点的高精度测量。随着传感器、电子、光学、计算机等技术的发展,基于计算机视觉理论获取物体表面三维信息的摄影测
基于MOEMS扫描镜的激光测距方法及激光雷达系统.pdf
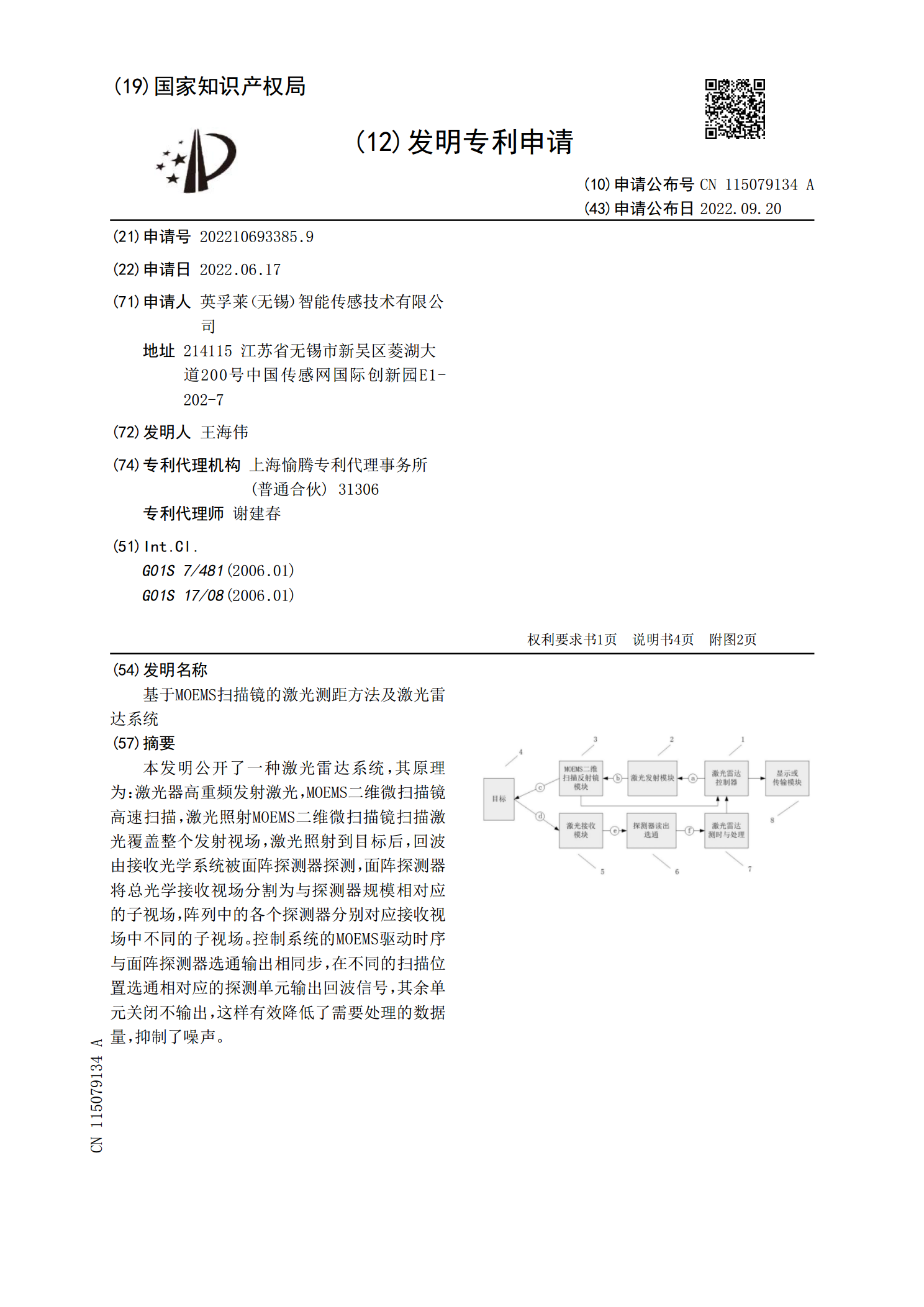
本发明公开了一种激光雷达系统,其原理为:激光器高重频发射激光,MOEMS二维微扫描镜高速扫描,激光照射MOEMS二维微扫描镜扫描激光覆盖整个发射视场,激光照射到目标后,回波由接收光学系统被面阵探测器探测,面阵探测器将总光学接收视场分割为与探测器规模相对应的子视场,阵列中的各个探测器分别对应接收视场中不同的子视场。控制系统的MOEMS驱动时序与面阵探测器选通输出相同步,在不同的扫描位置选通相对应的探测单元输出回波信号,其余单元关闭不输出,这样有效降低了需要处理的数据量,抑制了噪声。
激光烧结扫描方法.pdf
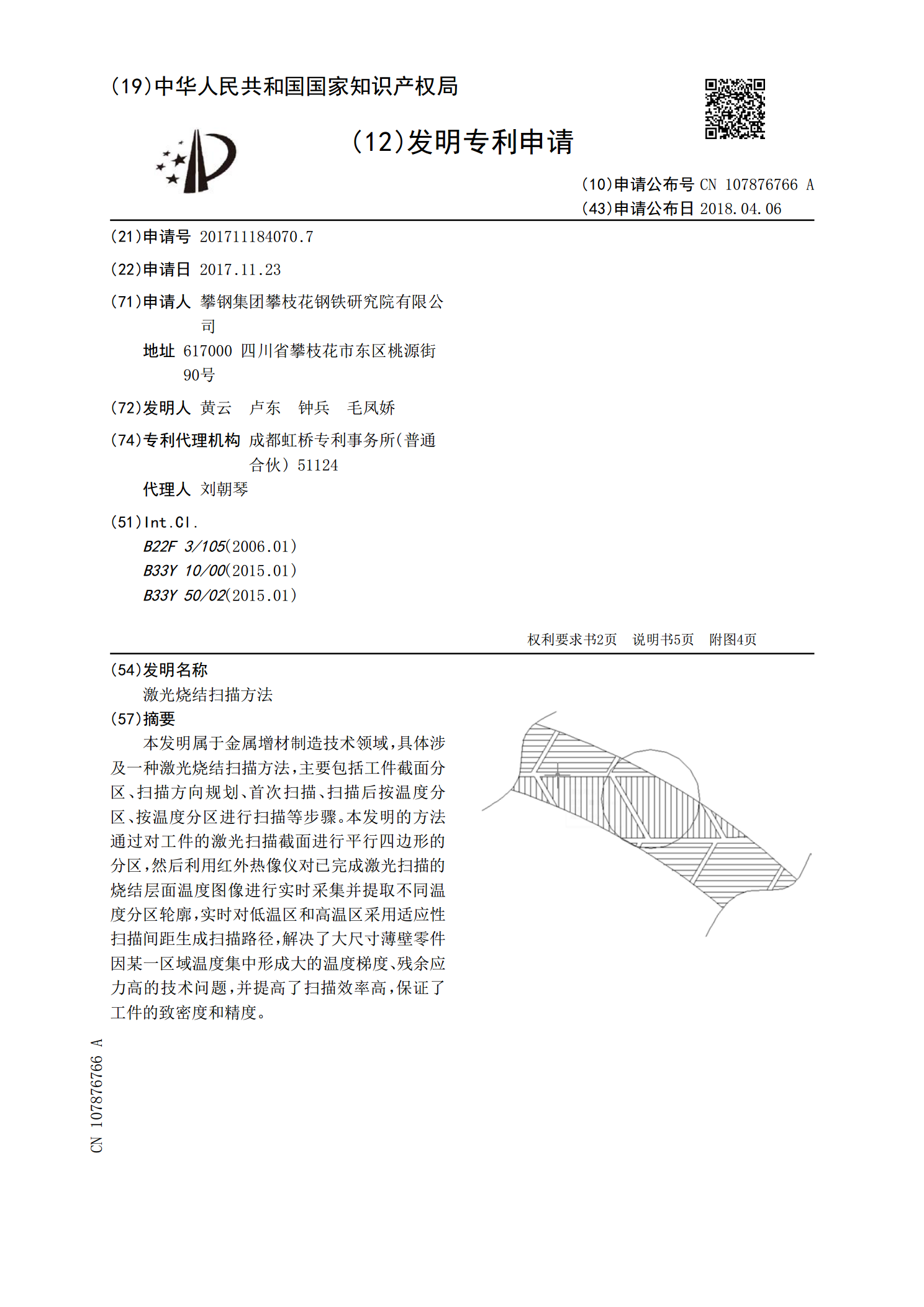
本发明属于金属增材制造技术领域,具体涉及一种激光烧结扫描方法,主要包括工件截面分区、扫描方向规划、首次扫描、扫描后按温度分区、按温度分区进行扫描等步骤。本发明的方法通过对工件的激光扫描截面进行平行四边形的分区,然后利用红外热像仪对已完成激光扫描的烧结层面温度图像进行实时采集并提取不同温度分区轮廓,实时对低温区和高温区采用适应性扫描间距生成扫描路径,解决了大尺寸薄壁零件因某一区域温度集中形成大的温度梯度、残余应力高的技术问题,并提高了扫描效率高,保证了工件的致密度和精度。