
基于MOEMS扫描镜的激光测距方法及激光雷达系统.pdf

猫巷****奕声

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于MOEMS扫描镜的激光测距方法及激光雷达系统.pdf
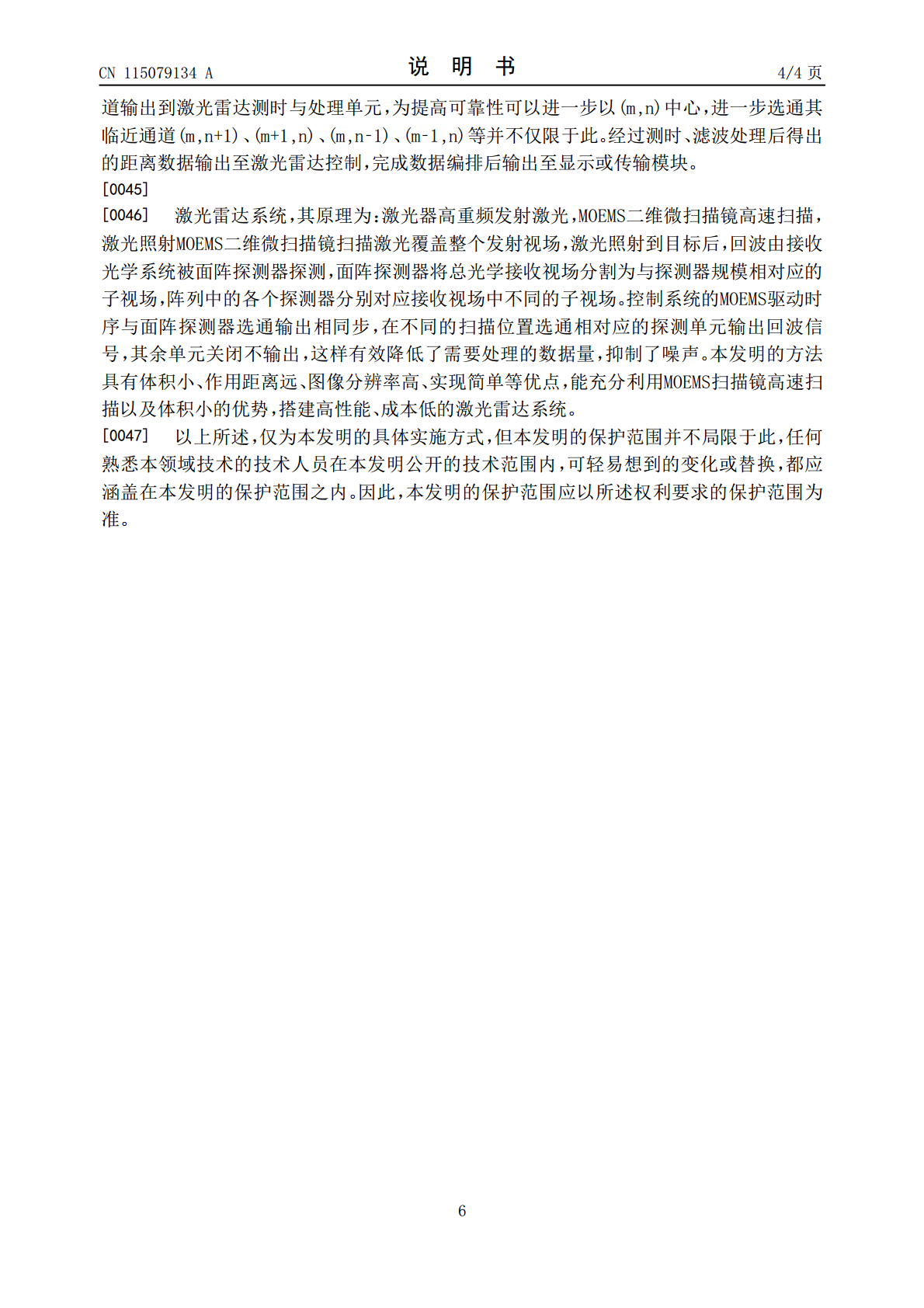
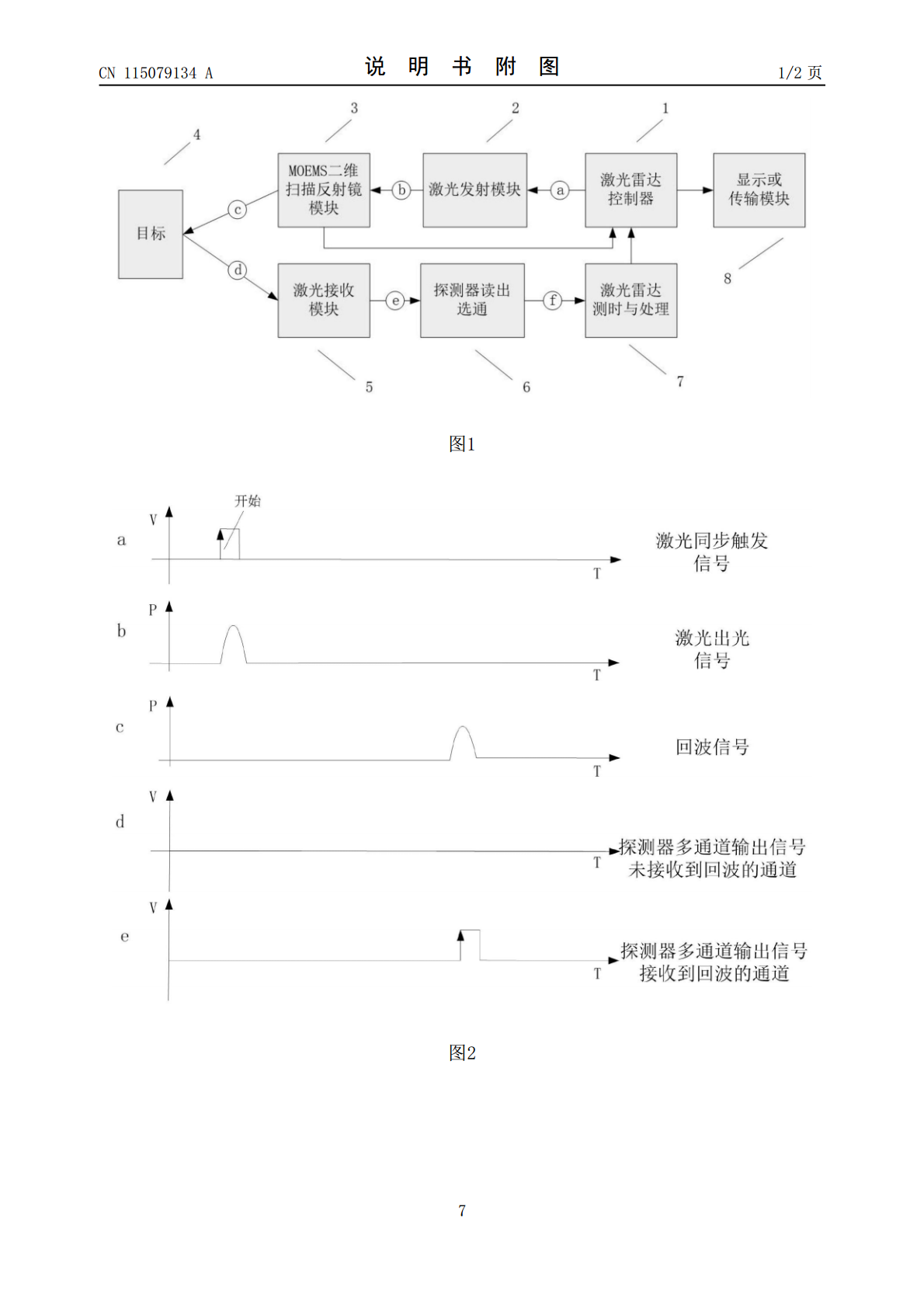
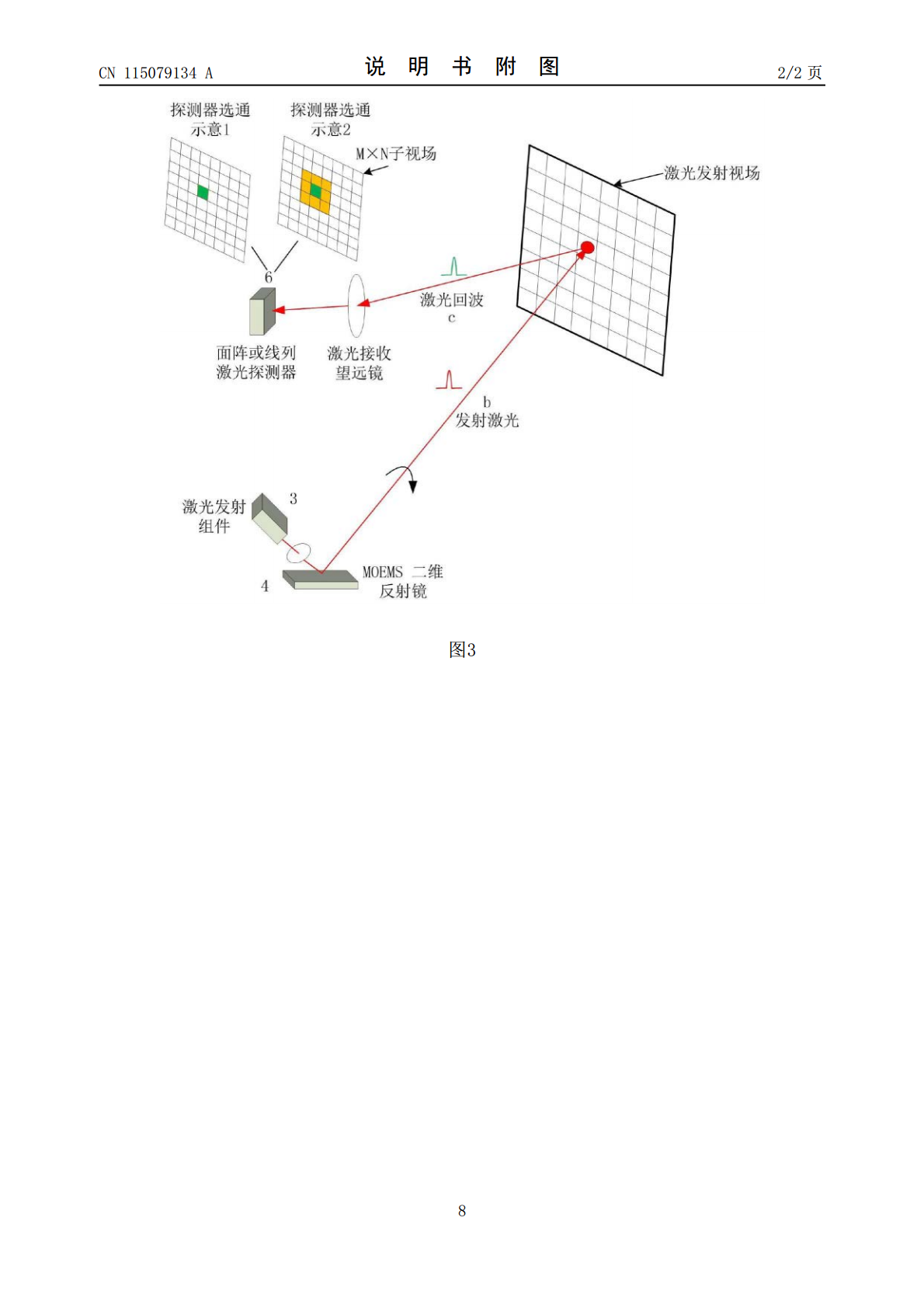
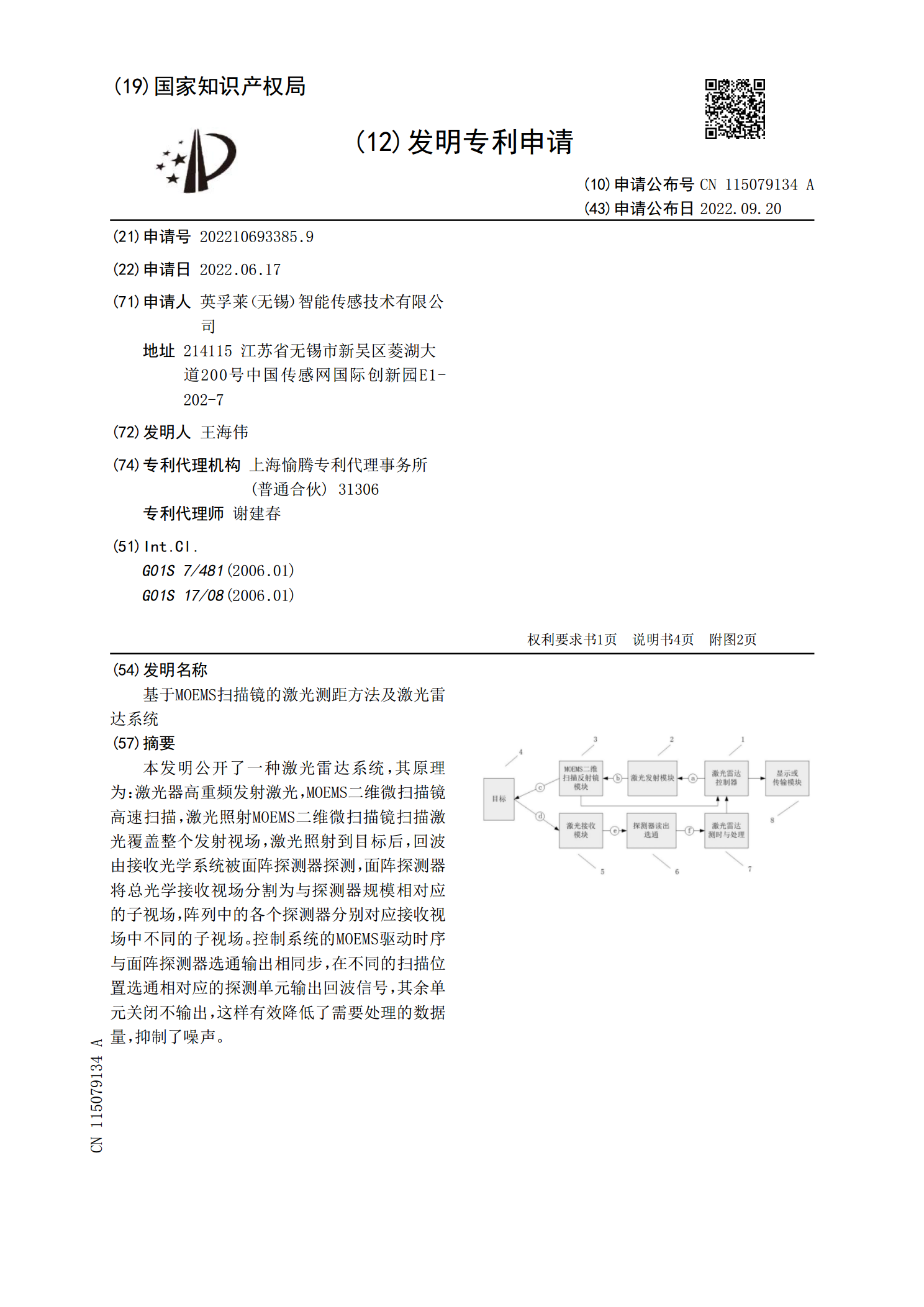
本发明公开了一种激光雷达系统,其原理为:激光器高重频发射激光,MOEMS二维微扫描镜高速扫描,激光照射MOEMS二维微扫描镜扫描激光覆盖整个发射视场,激光照射到目标后,回波由接收光学系统被面阵探测器探测,面阵探测器将总光学接收视场分割为与探测器规模相对应的子视场,阵列中的各个探测器分别对应接收视场中不同的子视场。控制系统的MOEMS驱动时序与面阵探测器选通输出相同步,在不同的扫描位置选通相对应的探测单元输出回波信号,其余单元关闭不输出,这样有效降低了需要处理的数据量,抑制了噪声。
激光测距方法、激光测距系统及其激光雷达系统.pdf
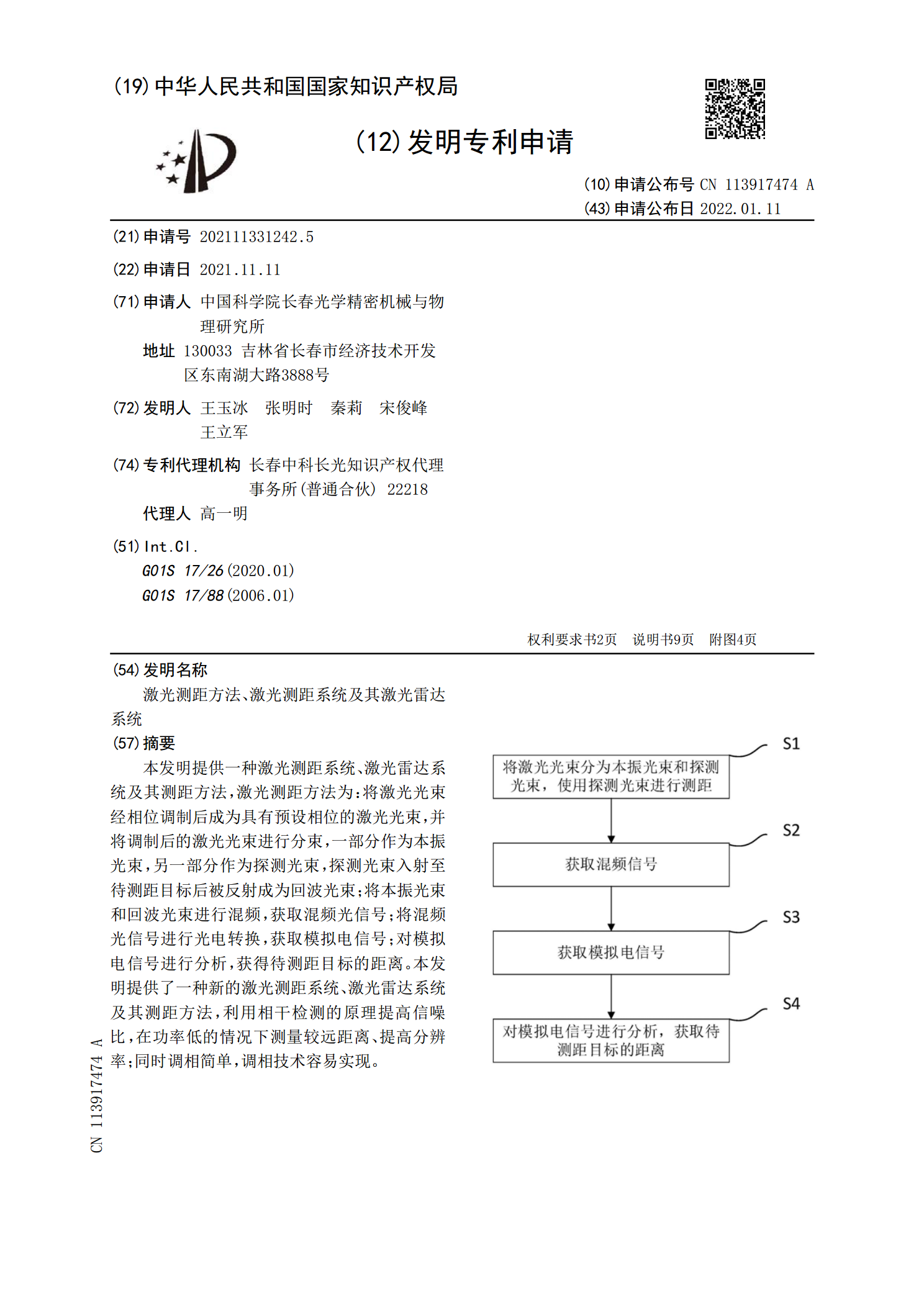
本发明提供一种激光测距系统、激光雷达系统及其测距方法,激光测距方法为:将激光光束经相位调制后成为具有预设相位的激光光束,并将调制后的激光光束进行分束,一部分作为本振光束,另一部分作为探测光束,探测光束入射至待测距目标后被反射成为回波光束;将本振光束和回波光束进行混频,获取混频光信号;将混频光信号进行光电转换,获取模拟电信号;对模拟电信号进行分析,获得待测距目标的距离。本发明提供了一种新的激光测距系统、激光雷达系统及其测距方法,利用相干检测的原理提高信噪比,在功率低的情况下测量较远距离、提高分辨率;同时调相
旋转扫描激光雷达及相应的激光测距方法.pdf
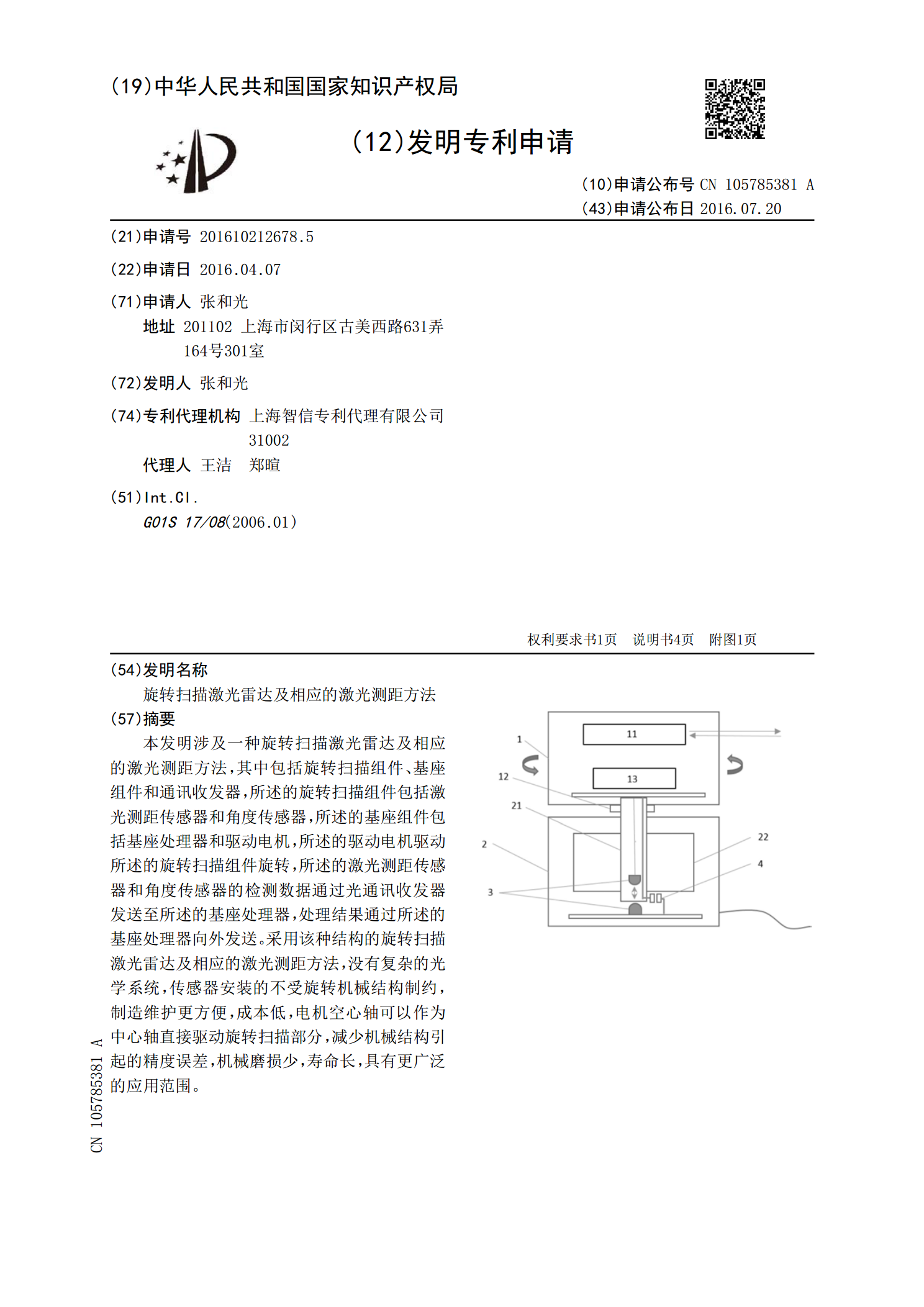
本发明涉及一种旋转扫描激光雷达及相应的激光测距方法,其中包括旋转扫描组件、基座组件和通讯收发器,所述的旋转扫描组件包括激光测距传感器和角度传感器,所述的基座组件包括基座处理器和驱动电机,所述的驱动电机驱动所述的旋转扫描组件旋转,所述的激光测距传感器和角度传感器的检测数据通过光通讯收发器发送至所述的基座处理器,处理结果通过所述的基座处理器向外发送。采用该种结构的旋转扫描激光雷达及相应的激光测距方法,没有复杂的光学系统,传感器安装的不受旋转机械结构制约,制造维护更方便,成本低,电机空心轴可以作为中心轴直接驱动
激光雷达接收装置、激光雷达系统和激光测距方法.pdf
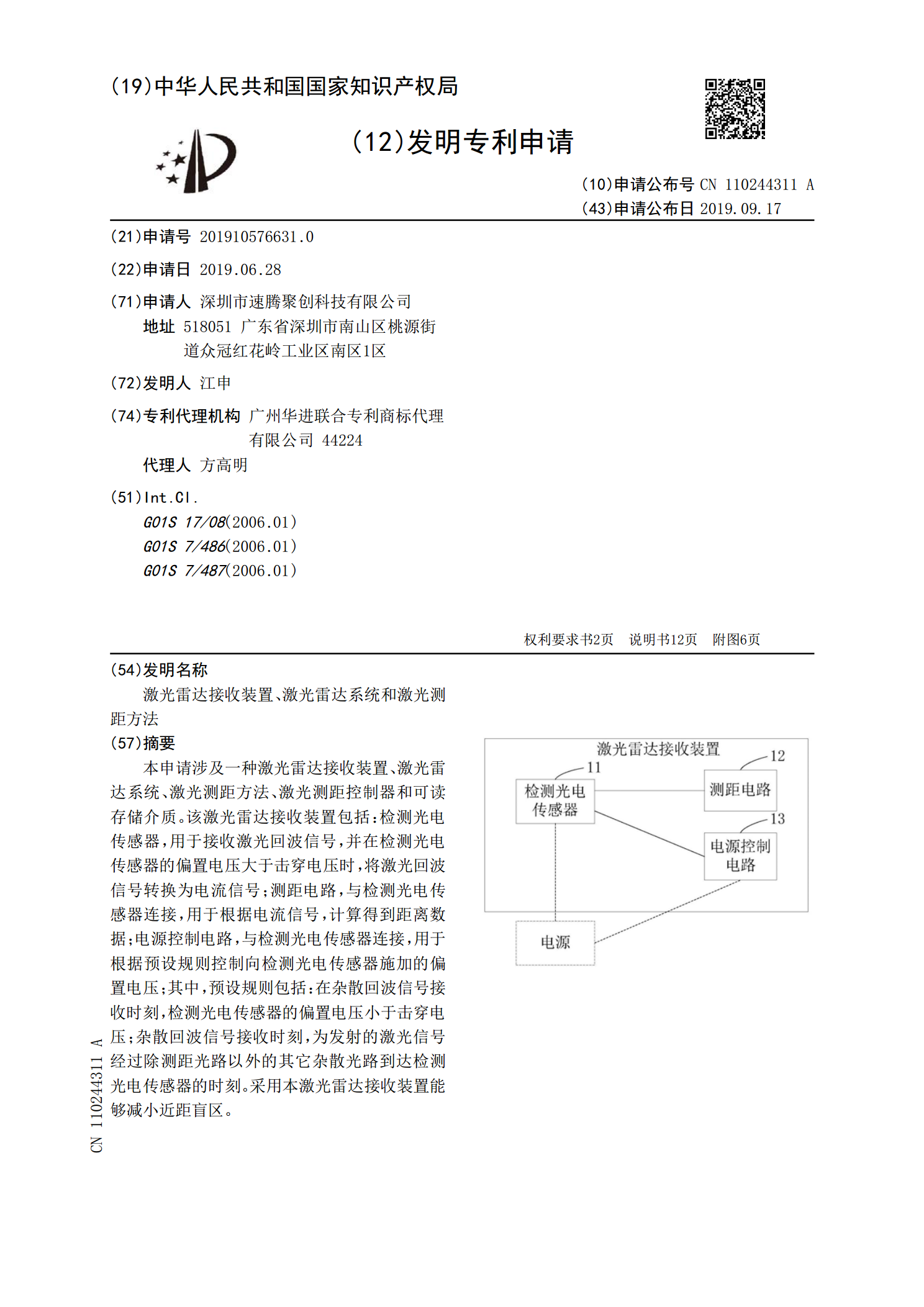
本申请涉及一种激光雷达接收装置、激光雷达系统、激光测距方法、激光测距控制器和可读存储介质。该激光雷达接收装置包括:检测光电传感器,用于接收激光回波信号,并在检测光电传感器的偏置电压大于击穿电压时,将激光回波信号转换为电流信号;测距电路,与检测光电传感器连接,用于根据电流信号,计算得到距离数据;电源控制电路,与检测光电传感器连接,用于根据预设规则控制向检测光电传感器施加的偏置电压;其中,预设规则包括:在杂散回波信号接收时刻,检测光电传感器的偏置电压小于击穿电压;杂散回波信号接收时刻,为发射的激光信号经过除测

基于MEMS扫描振镜的激光雷达的研究.docx
基于MEMS扫描振镜的激光雷达的研究基于MEMS扫描振镜的激光雷达概述:随着科技的进步和应用领域的不断扩展,激光雷达成为自动驾驶、机器人导航等领域中不可或缺的重要技术。目前,MEMS扫描振镜激光雷达作为一种新兴的激光雷达技术,由于其小巧、高精度和低功耗的特点,越来越受到关注。本文将介绍基于MEMS扫描振镜的激光雷达的研究进展和应用前景。引言:激光雷达是一种利用激光束探测目标位置和距离的技术,广泛应用于自动驾驶、机器人导航、物体识别等领域。传统的激光雷达通常采用旋转台扫描的方式获取目标信息,但是这种方式存在