
一种智能清洁设备.pdf

玉环****找我

1/8
2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能清洁设备.pdf
本发明公开了一种智能清洁设备,在底板底面四角分别设有立柱,在立柱上设有滚轮,滚轮通过电机驱动,在底板底面前部分间隔设有支撑板,支撑板之间通过轴承设有清洁滚刷,其中一支撑板外侧设有第一电机,第一电机的电机轴与清洁滚刷相连接,在底板上设有吸尘器,在底板底面后部分设有吸尘头,吸尘头与吸尘器之间设有连接管,在底板上设有GPS导向器,在底板上设有能使智能清洁设备遇墙后转向的转向装置,在滚轮上方的立柱上设有伸缩机构,通过设有GPS导向器能够使智能清洁设备按照室内的布局移动,通过转向装置使智能清洁设备在碰到墙壁的时候能
一种智能工厂清洁设备.pdf
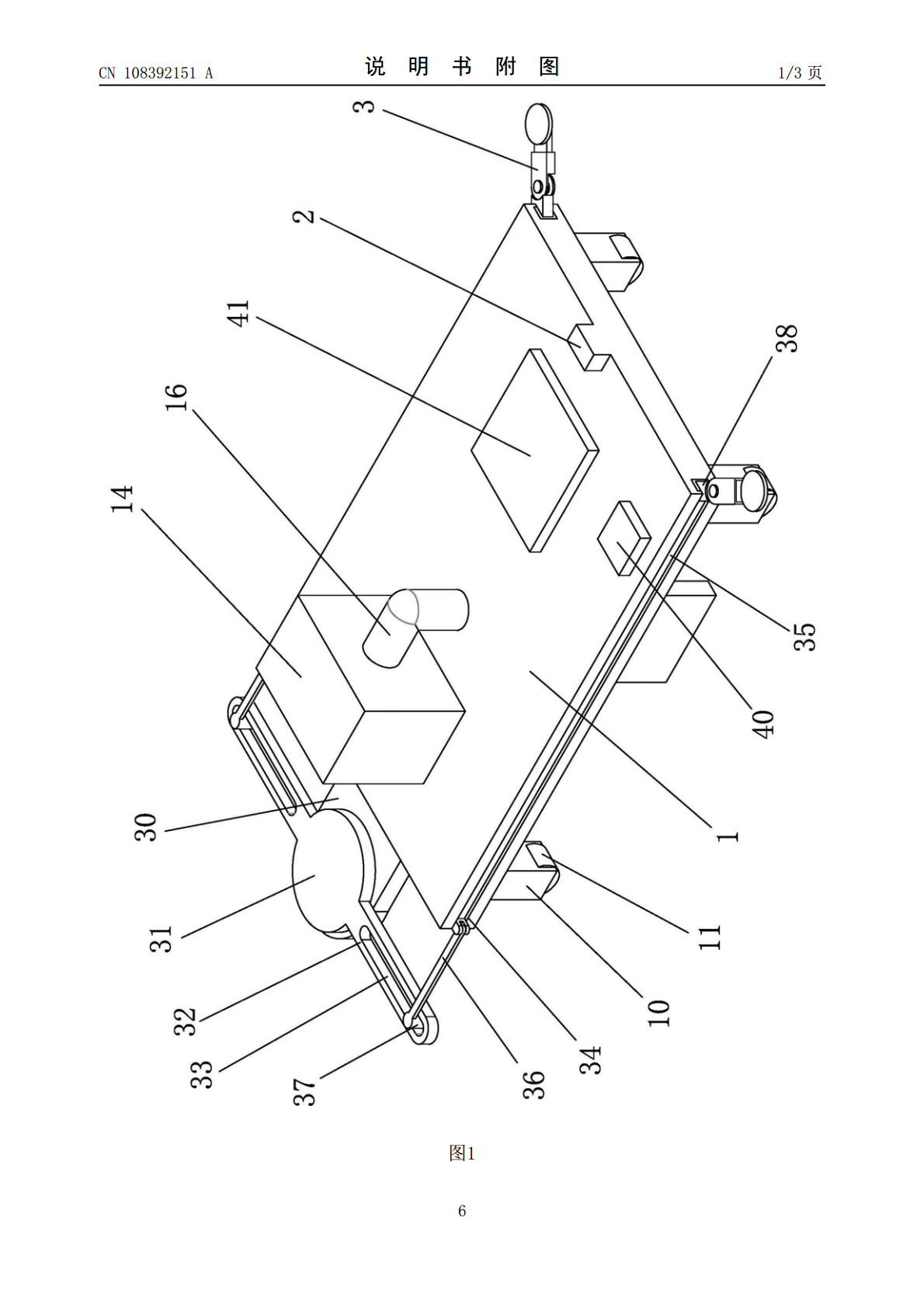
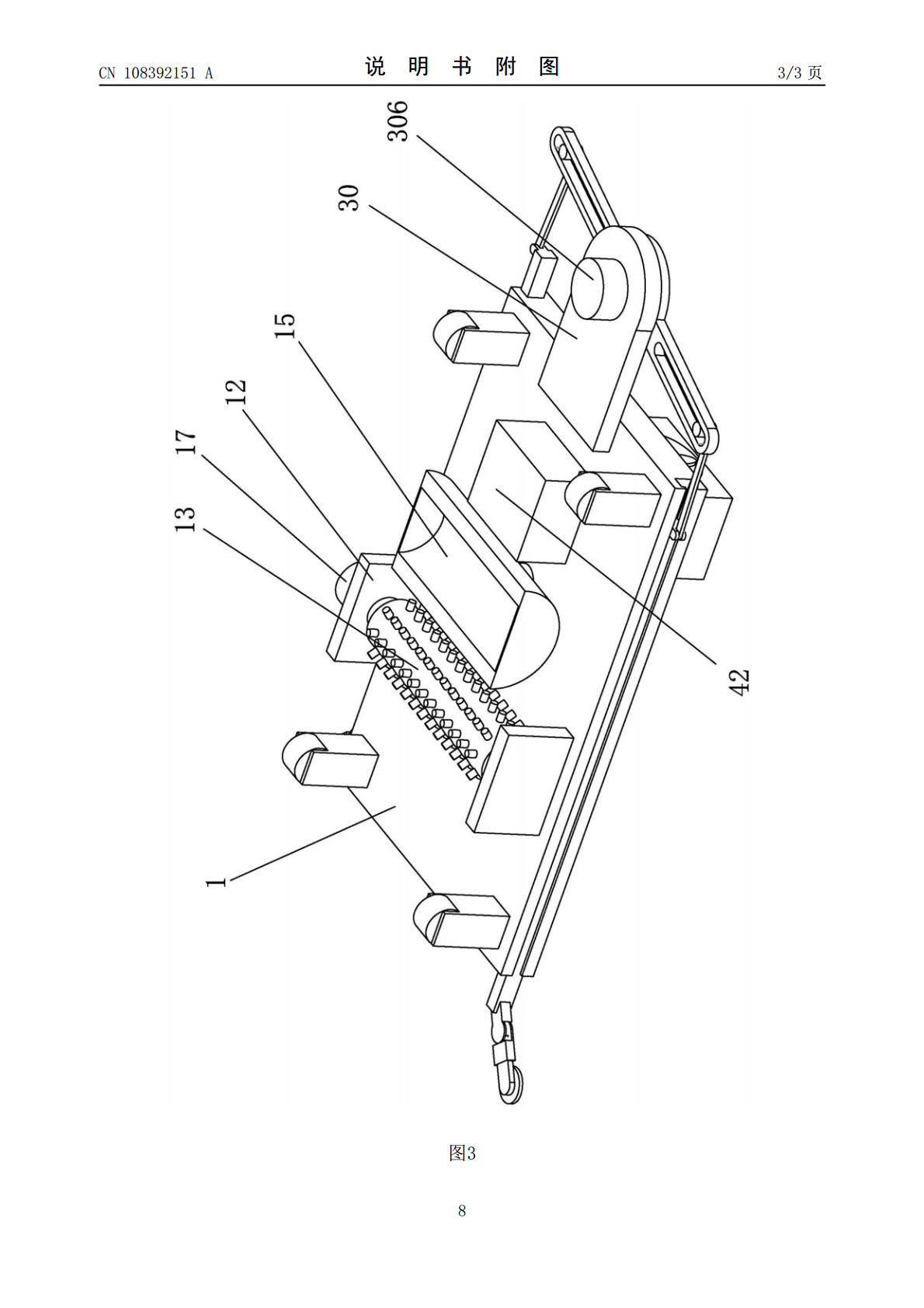
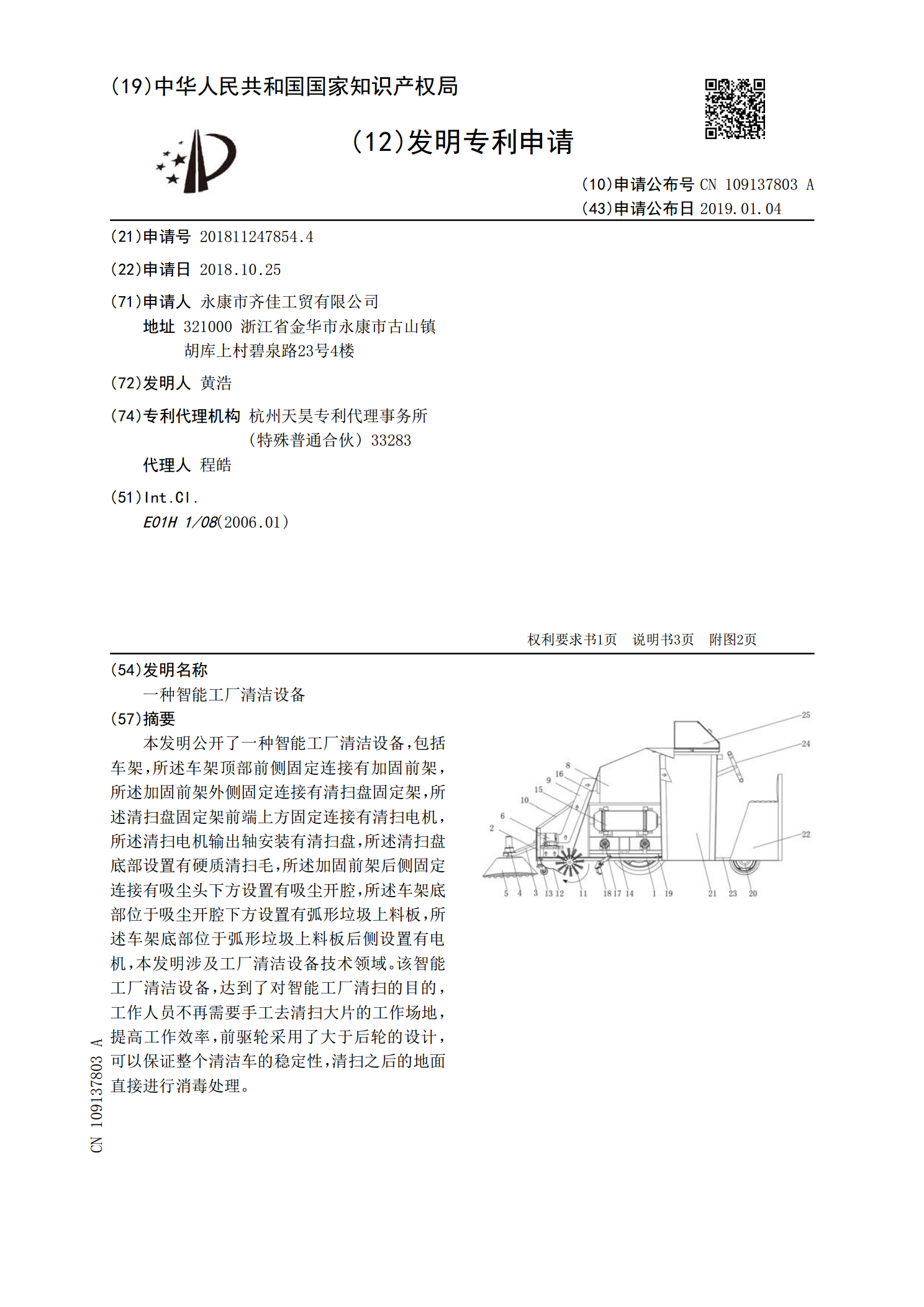
本发明公开了一种智能工厂清洁设备,包括车架,所述车架顶部前侧固定连接有加固前架,所述加固前架外侧固定连接有清扫盘固定架,所述清扫盘固定架前端上方固定连接有清扫电机,所述清扫电机输出轴安装有清扫盘,所述清扫盘底部设置有硬质清扫毛,所述加固前架后侧固定连接有吸尘头下方设置有吸尘开腔,所述车架底部位于吸尘开腔下方设置有弧形垃圾上料板,所述车架底部位于弧形垃圾上料板后侧设置有电机,本发明涉及工厂清洁设备技术领域。该智能工厂清洁设备,达到了对智能工厂清扫的目的,工作人员不再需要手工去清扫大片的工作场地,提高工作效率
一种智能清洁设备.pdf
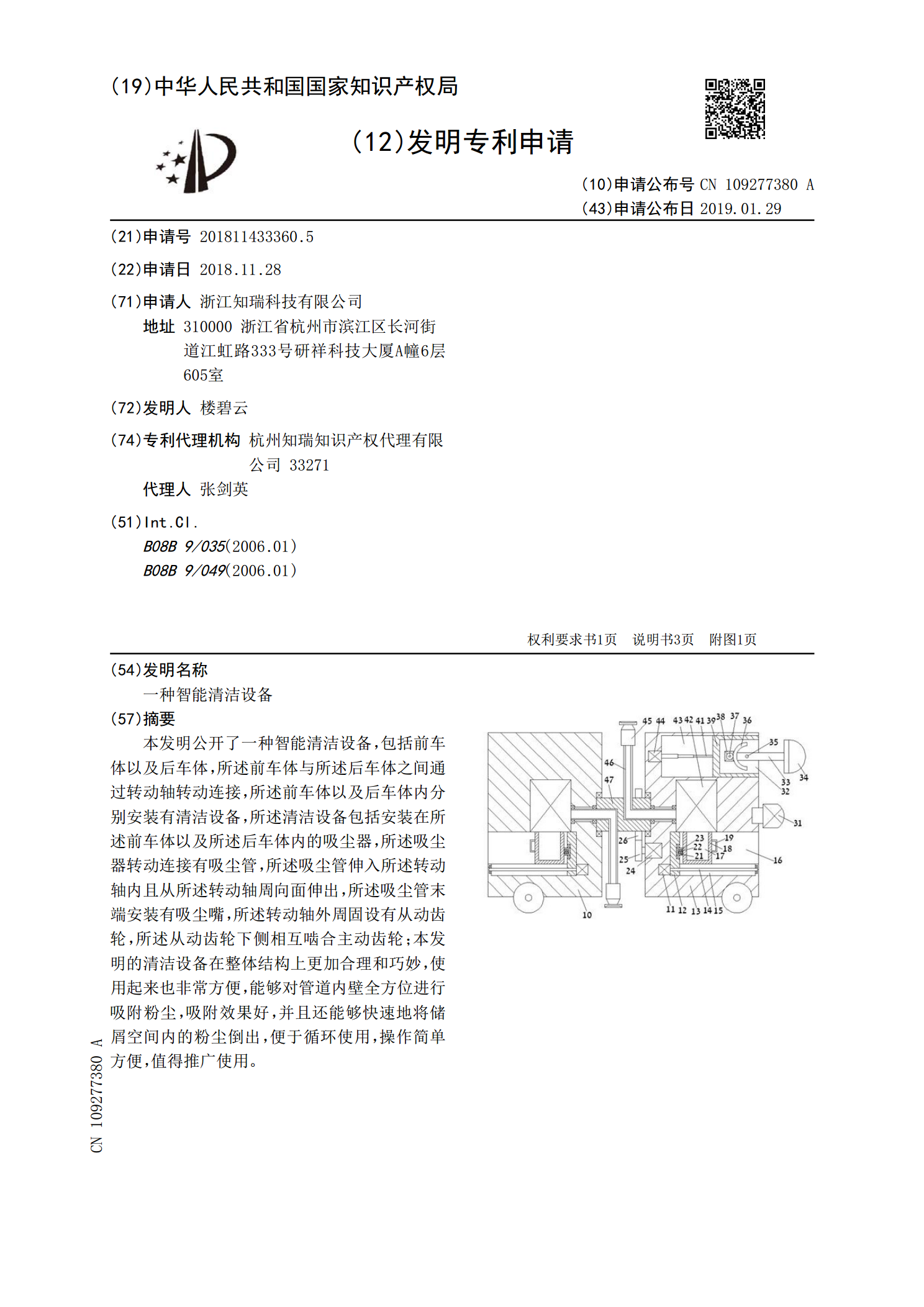
本发明公开了一种智能清洁设备,包括前车体以及后车体,所述前车体与所述后车体之间通过转动轴转动连接,所述前车体以及后车体内分别安装有清洁设备,所述清洁设备包括安装在所述前车体以及所述后车体内的吸尘器,所述吸尘器转动连接有吸尘管,所述吸尘管伸入所述转动轴内且从所述转动轴周向面伸出,所述吸尘管末端安装有吸尘嘴,所述转动轴外周固设有从动齿轮,所述从动齿轮下侧相互啮合主动齿轮;本发明的清洁设备在整体结构上更加合理和巧妙,使用起来也非常方便,能够对管道内壁全方位进行吸附粉尘,吸附效果好,并且还能够快速地将储屑空间内的

一种易清洁的智能烹饪设备.pdf
本发明公开了一种易清洁的智能烹饪设备,包括盖体和座体,盖体上配置有搅拌构件;连接臂上配置有驱动装置,该驱动装置通过传动机构驱动搅拌构件实施搅拌动作;传动机构包括:驱动轴,其配置在连接臂上,并受驱动装置的驱动而在连接臂上定轴线旋转;联接轴,其与驱动轴连接,并受驱与驱动轴同轴线旋转;行星轮组件,其用于驱动搅拌构件以其自身轴线自转的同时绕联接轴的轴线公转,包括固定盖、活动盖、太阳轮和两个行星轮;联接轴穿过固定盖和活动盖,并驱动活动盖相对于固定盖旋转,联接轴与活动盖在其轴线方向上通过一锁紧件锁紧连接,在其圆周方向
一种基于智能制造的线路板智能清洁设备.pdf
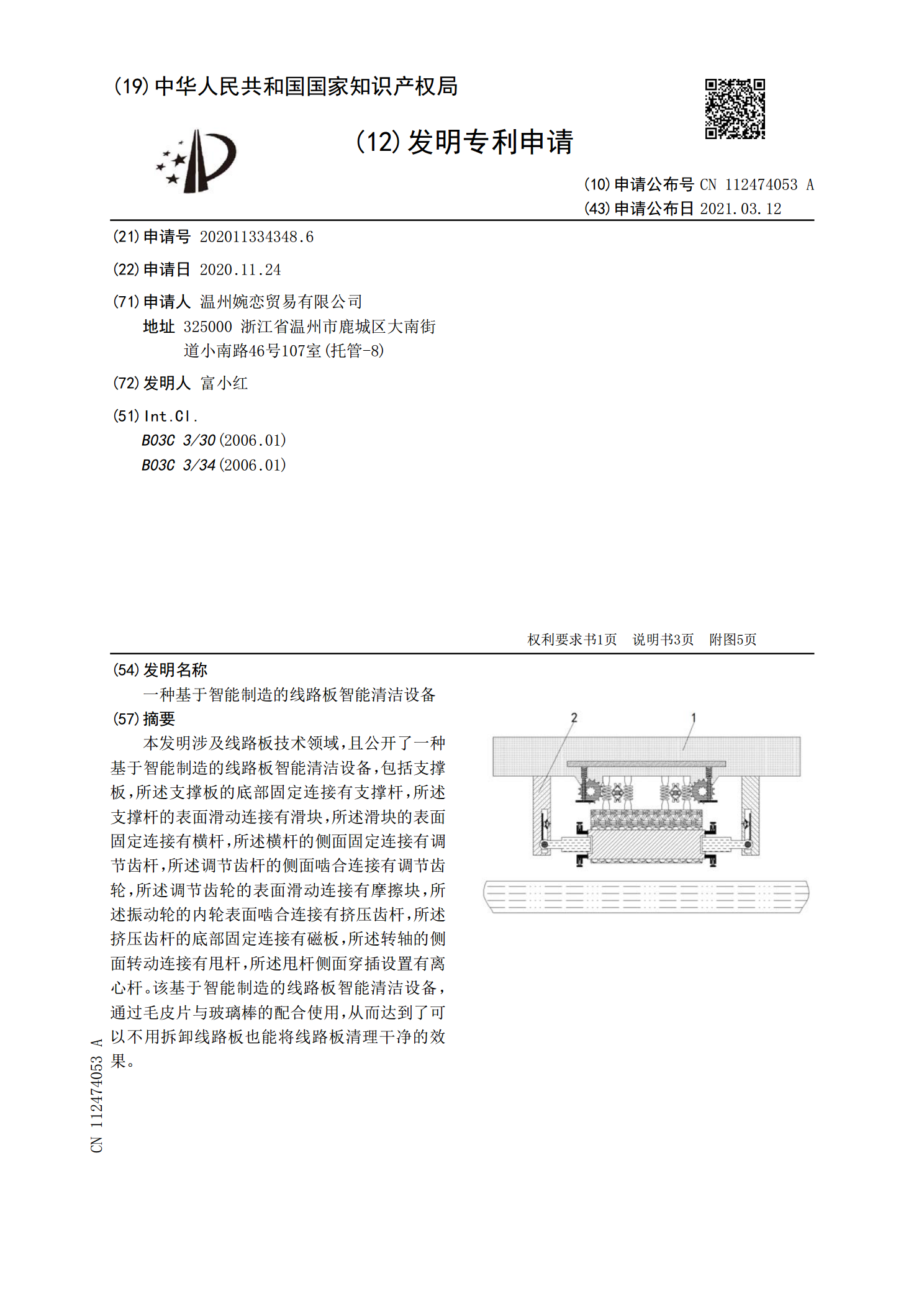
本发明涉及线路板技术领域,且公开了一种基于智能制造的线路板智能清洁设备,包括支撑板,所述支撑板的底部固定连接有支撑杆,所述支撑杆的表面滑动连接有滑块,所述滑块的表面固定连接有横杆,所述横杆的侧面固定连接有调节齿杆,所述调节齿杆的侧面啮合连接有调节齿轮,所述调节齿轮的表面滑动连接有摩擦块,所述振动轮的内轮表面啮合连接有挤压齿杆,所述挤压齿杆的底部固定连接有磁板,所述转轴的侧面转动连接有甩杆,所述甩杆侧面穿插设置有离心杆。该基于智能制造的线路板智能清洁设备,通过毛皮片与玻璃棒的配合使用,从而达到了可以不用拆卸