
基于感知载荷和主动制动的重型车防侧翻预警系统.pdf

景山****魔王

1/7
2/7
3/7

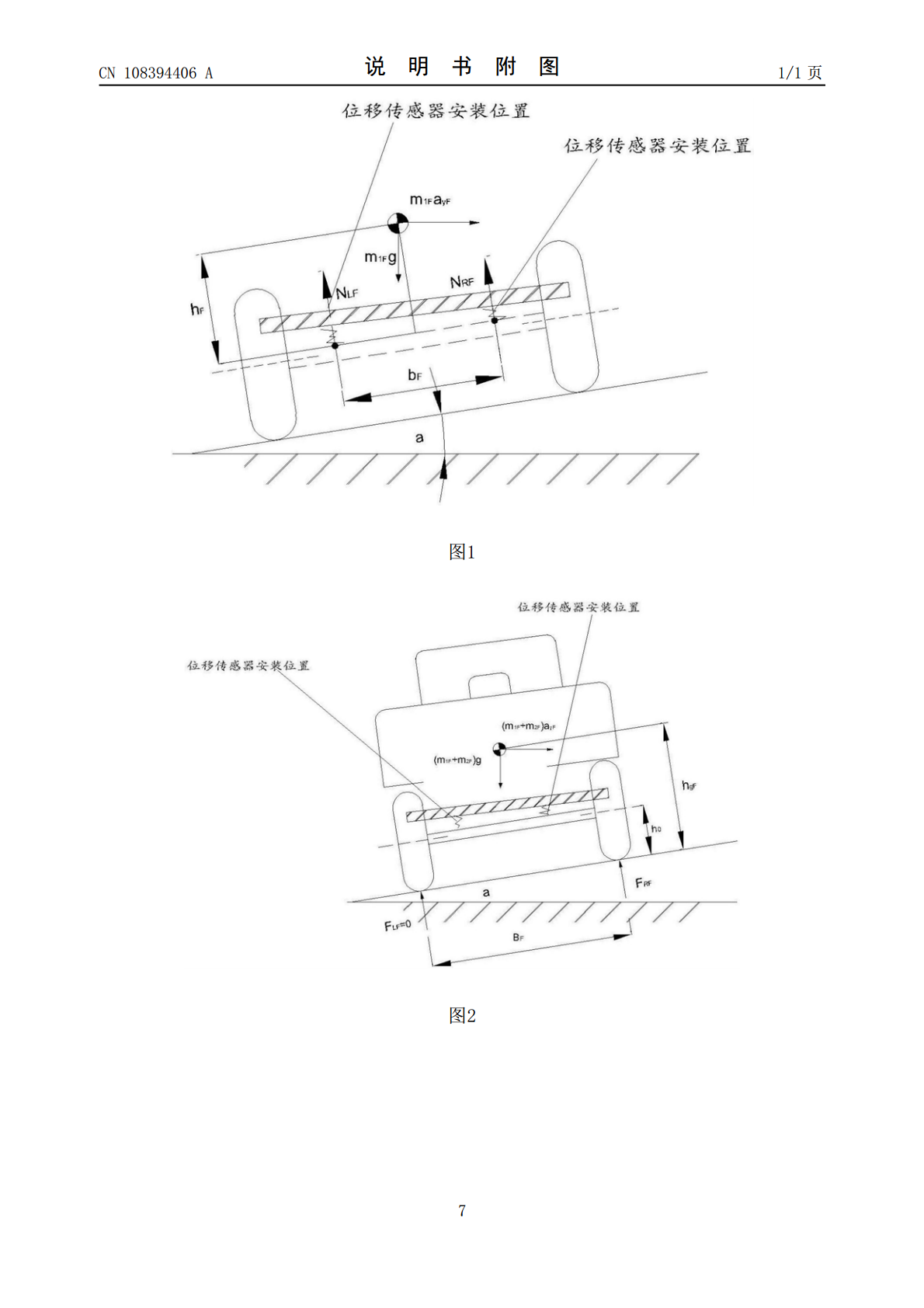
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于感知载荷和主动制动的重型车防侧翻预警系统.pdf
本发明公开了基于感知载荷和主动制动的重型车防侧翻预警系统,通过位移传感器接收悬挂位移量,横向加速度传感器接收加速度信号,对两个信号进行相应的处理,结合计算得到的力学模型代入计算出左前、左后、右前和右后支反力的值;再代入横向载荷转移率LTR模型中,计算实时的横向载荷转移率,本发明能实时测出悬挂簧载压力的变化,从而得到质心的最新位置,实时得到四个车轮位置处的支反力大小,代入LTR中所计算出来横向载荷转移率具有精确性,实时性,减小了测量值与运行状态的迟滞性防侧翻预警和控制系统所测的是动态载荷,符合重型车质心高,
一种气压制动重型车的防侧翻装置及控制方法.pdf
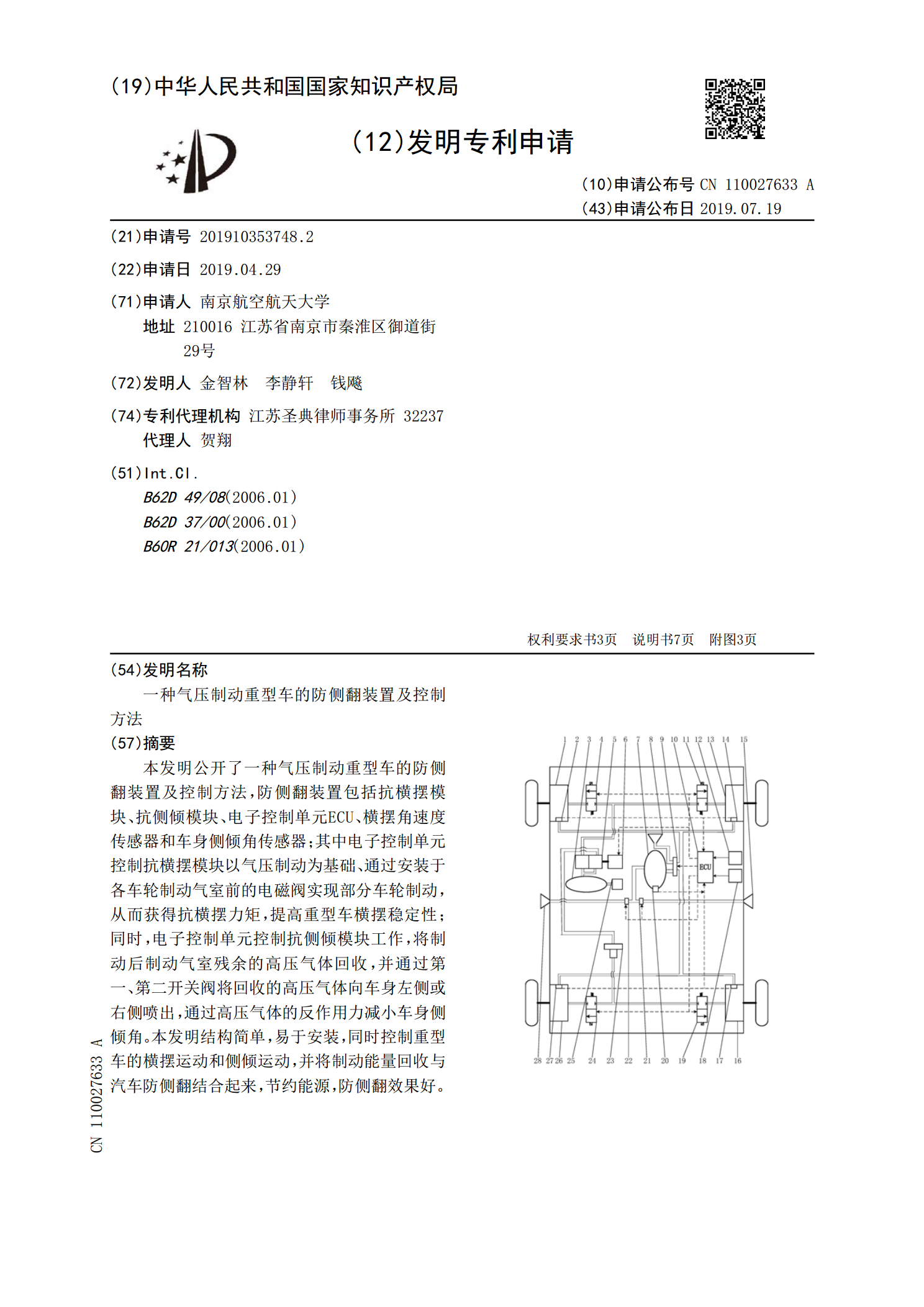
本发明公开了一种气压制动重型车的防侧翻装置及控制方法,防侧翻装置包括抗横摆模块、抗侧倾模块、电子控制单元ECU、横摆角速度传感器和车身侧倾角传感器;其中电子控制单元控制抗横摆模块以气压制动为基础、通过安装于各车轮制动气室前的电磁阀实现部分车轮制动,从而获得抗横摆力矩,提高重型车横摆稳定性;同时,电子控制单元控制抗侧倾模块工作,将制动后制动气室残余的高压气体回收,并通过第一、第二开关阀将回收的高压气体向车身左侧或右侧喷出,通过高压气体的反作用力减小车身侧倾角。本发明结构简单,易于安装,同时控制重型车的横摆运
基于微惯性/卫星/地磁组合测量重型车侧翻预警装置.pdf
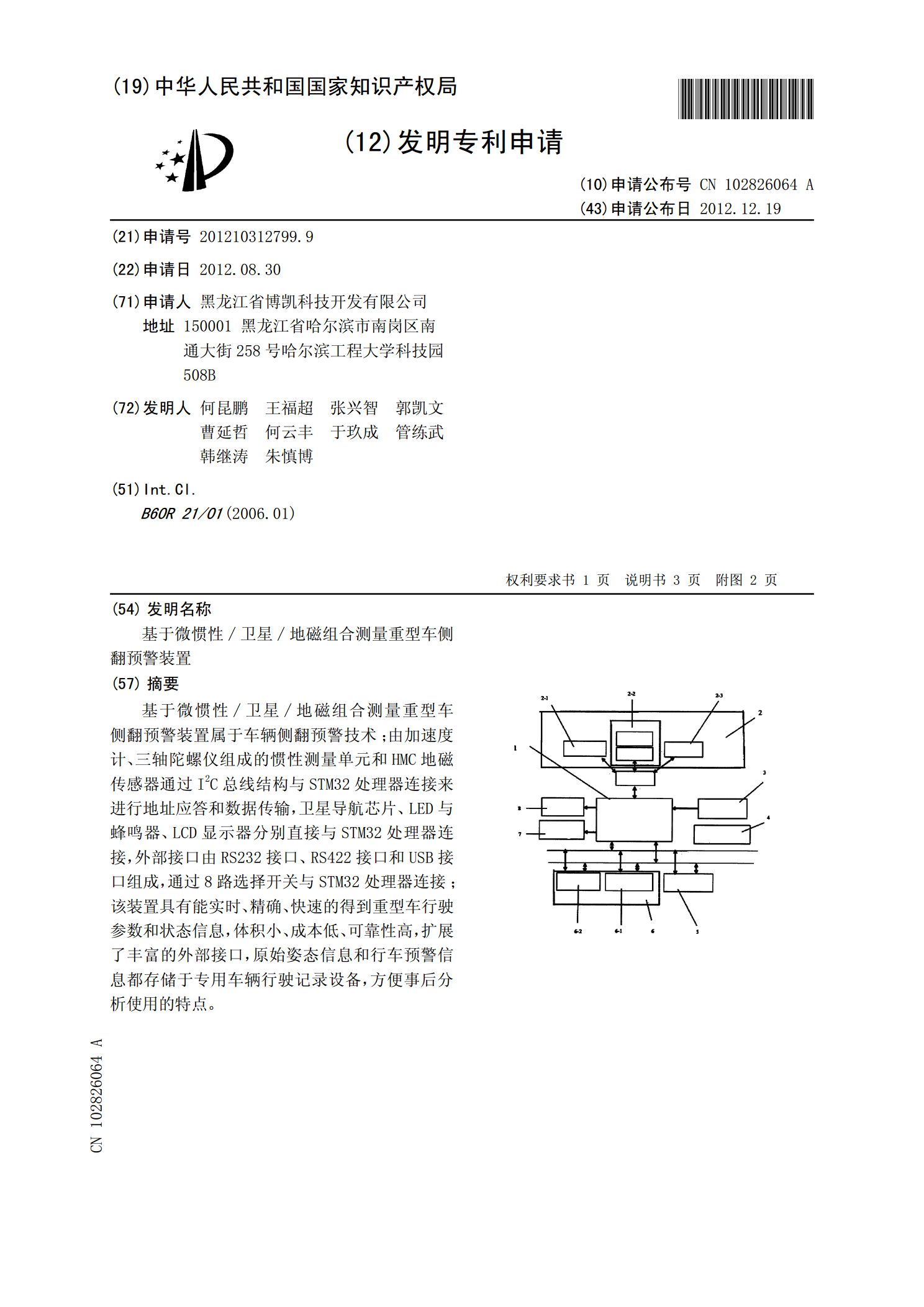
基于微惯性/卫星/地磁组合测量重型车侧翻预警装置属于车辆侧翻预警技术;由加速度计、三轴陀螺仪组成的惯性测量单元和HMC地磁传感器通过I2C总线结构与STM32处理器连接来进行地址应答和数据传输,卫星导航芯片、LED与蜂鸣器、LCD显示器分别直接与STM32处理器连接,外部接口由RS232接口、RS422接口和USB接口组成,通过8路选择开关与STM32处理器连接;该装置具有能实时、精确、快速的得到重型车行驶参数和状态信息,体积小、成本低、可靠性高,扩展了丰富的外部接口,原始姿态信息和行车预警信息都存储于专
一种重型卡车弯道防侧翻预警系统.pdf
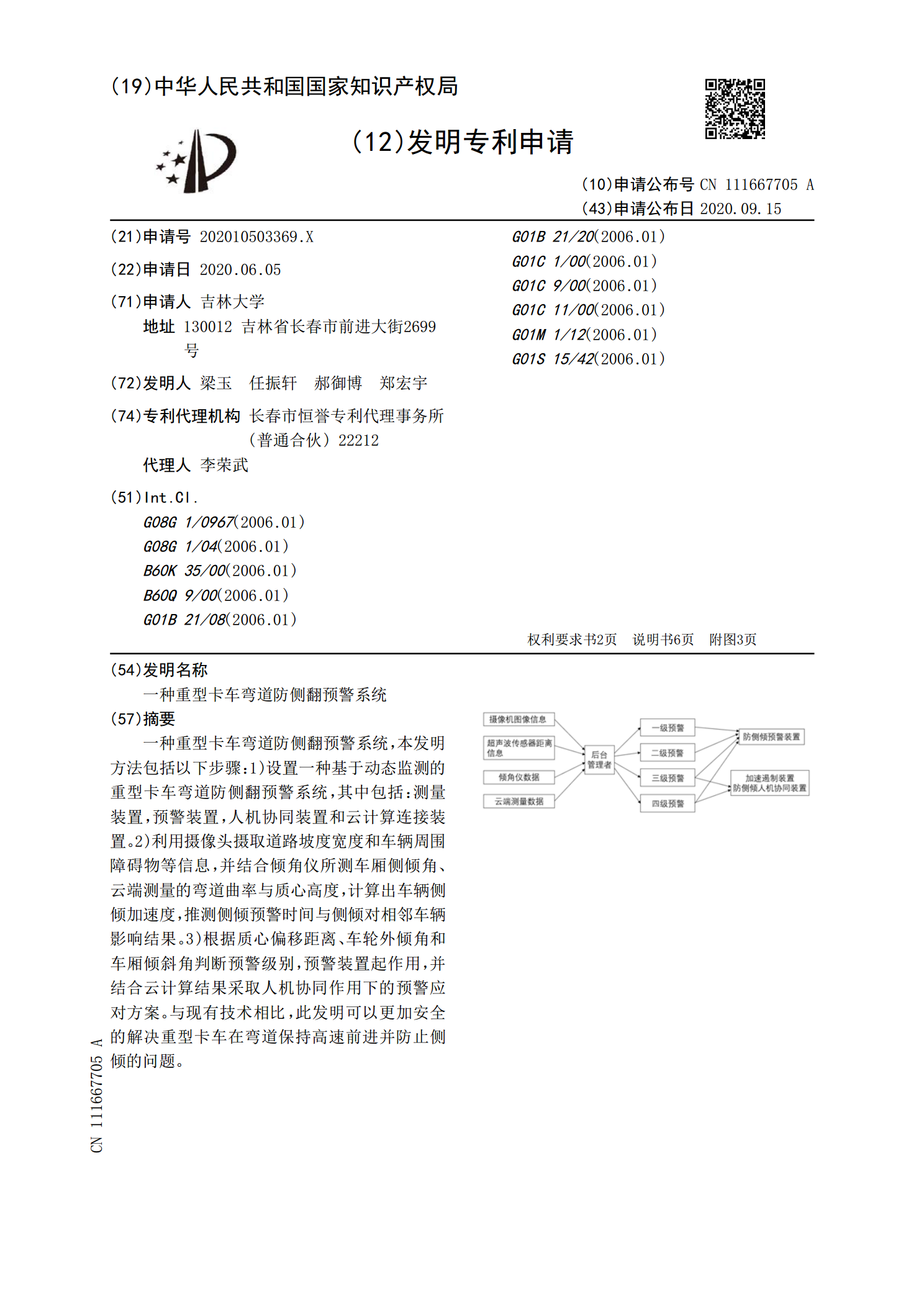
一种重型卡车弯道防侧翻预警系统,本发明方法包括以下步骤:1)设置一种基于动态监测的重型卡车弯道防侧翻预警系统,其中包括:测量装置,预警装置,人机协同装置和云计算连接装置。2)利用摄像头摄取道路坡度宽度和车辆周围障碍物等信息,并结合倾角仪所测车厢侧倾角、云端测量的弯道曲率与质心高度,计算出车辆侧倾加速度,推测侧倾预警时间与侧倾对相邻车辆影响结果。3)根据质心偏移距离、车轮外倾角和车厢倾斜角判断预警级别,预警装置起作用,并结合云计算结果采取人机协同作用下的预警应对方案。与现有技术相比,此发明可以更加安全的解决
基于微小侧滑的汽车防侧翻控制装置及方法.pdf
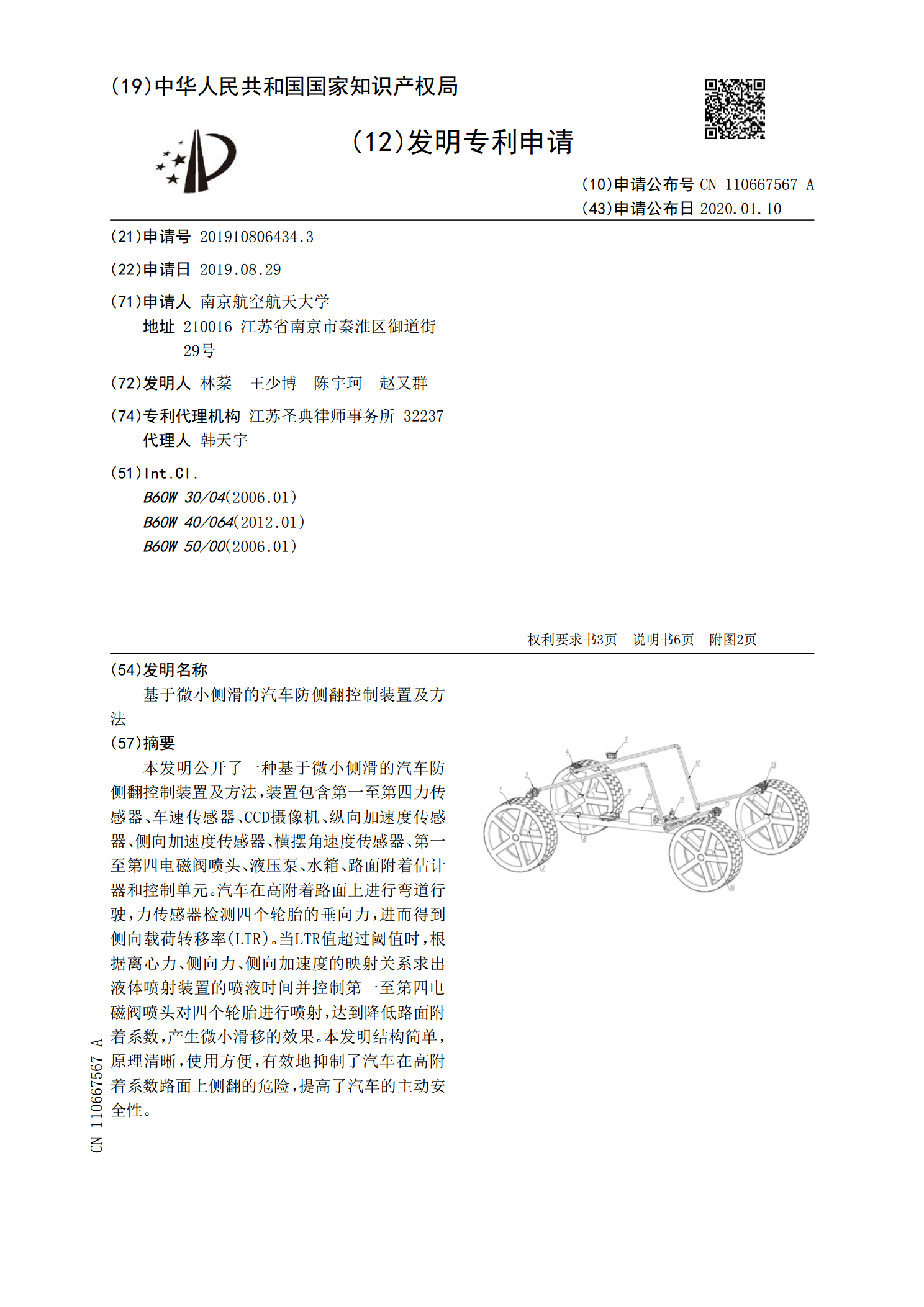
本发明公开了一种基于微小侧滑的汽车防侧翻控制装置及方法,装置包含第一至第四力传感器、车速传感器、CCD摄像机、纵向加速度传感器、侧向加速度传感器、横摆角速度传感器、第一至第四电磁阀喷头、液压泵、水箱、路面附着估计器和控制单元。汽车在高附着路面上进行弯道行驶,力传感器检测四个轮胎的垂向力,进而得到侧向载荷转移率(LTR)。当LTR值超过阈值时,根据离心力、侧向力、侧向加速度的映射关系求出液体喷射装置的喷液时间并控制第一至第四电磁阀喷头对四个轮胎进行喷射,达到降低路面附着系数,产生微小滑移的效果。本发明结构简